Clear Sky Science · de
Hindernisbewusste inverse Kinematik variabler Längen von Kontinuumsrobotern mittels Teaching–Learning-basierter Optimierung mit experimenteller Validierung
Roboter, die sich wie Elefantenrüssel bewegen
Stellen Sie sich einen Roboterarm vor, der sich kringelt, verdreht und sich durch Trümmer zwängt, so wie ein Elefantenrüssel sich zwischen Baumästen hindurchschlängelt. Solche „Kontinuumsroboter“ sind weiche, flexible Maschinen, die für Einsätze an engen oder gefährlichen Orten entwickelt wurden – von eingestürzten Gebäuden bis zum Inneren des menschlichen Körpers. Diese Arbeit stellt eine neue Methode vor, um diese Roboter präzise zu steuern, selbst wenn sich ihre Körperlänge ändert und sie sicher um Hindernisse herumführen, und rückt diese futuristische Technologie näher an die praktische Anwendung heran.
Warum flexible Roboter schwer zu kontrollieren sind
Im Gegensatz zu steifen, gelenkigen Armen, wie man sie in einer Autofabrik sieht, basieren Kontinuumsroboter auf biegsamen Kernstrukturen, durch die Kabel oder Schläuche geführt sind. Sie können sich in viele Richtungen glatt krümmen und sogar ausfahren oder zusammenziehen, was ihnen große Reichweite und Beweglichkeit verleiht. Diese Flexibilität hat jedoch ihren Preis: vorherzusagen, wie sich die Spitze des Roboters bewegt, wenn man an seinen Kabeln zieht, ist kompliziert, und rückwärts von einer gewünschten Spitzeposition auf die richtigen Kabel- und Formparameter zu schließen ist noch schwieriger. Häufig gibt es viele Möglichkeiten, denselben Punkt zu erreichen, und die Bewegung ist stark nichtlinear, was traditionelle schrittweise Formeln nur schwer anwendbar macht.
Bewegungsplanung als intelligente Suche
Um diese Herausforderung anzugehen, behandeln die Autoren die Bewegungsplanung des Roboters als Suchproblem. Sie verwenden zunächst eine weit verbreitete geometrische Näherung, bei der sich jeder Abschnitt des Roboters wie ein glatter Kreisbogen krümmt. Mit diesem Modell führt jede konkrete Wahl von Krümmungswinkeln, Ausrichtungen und Abschnittslängen zu einer vorhergesagten Position der Roboterspitze. Die Kernidee besteht dann darin, den Computer über diese Möglichkeiten suchen zu lassen, um die Kombination zu finden, die die Spitze so nahe wie möglich an einen gewünschten Punkt im Raum bringt, unter Berücksichtigung physikalischer Grenzen dafür, wie stark Abschnitte gebogen oder ausgefahren werden dürfen.
Lernen aus einem virtuellen Klassenzimmer
Die Suchmaschine im Zentrum dieser Methode heißt Teaching–Learning-basierte Optimierung. Sie stellt sich ein Klassenzimmer mit „Schülern“ vor, wobei jeder Schüler eine mögliche Art repräsentiert, wie sich der Roboter biegen und strecken kann. In jeder Runde agiert der beste Schüler als „Lehrer“ und schubst die anderen in Richtung besserer Lösungen, während Schülerpaare auch voneinander durch ihre Unterschiede lernen. Über viele Runden konvergiert diese virtuelle Klasse zu einer Konfiguration, die den Zielpunkt sehr genau trifft. Ein einfacher Trick sorgt dafür, dass die Bewegung von Punkt zu Punkt glatt verläuft: Wenn der Roboter einem Pfad folgt, wird die beste Lösung für einen Punkt als Startschätzung für den nächsten wiederverwendet, was plötzliche Formwechsel vermeidet.
Abstand zu Hindernissen wahren
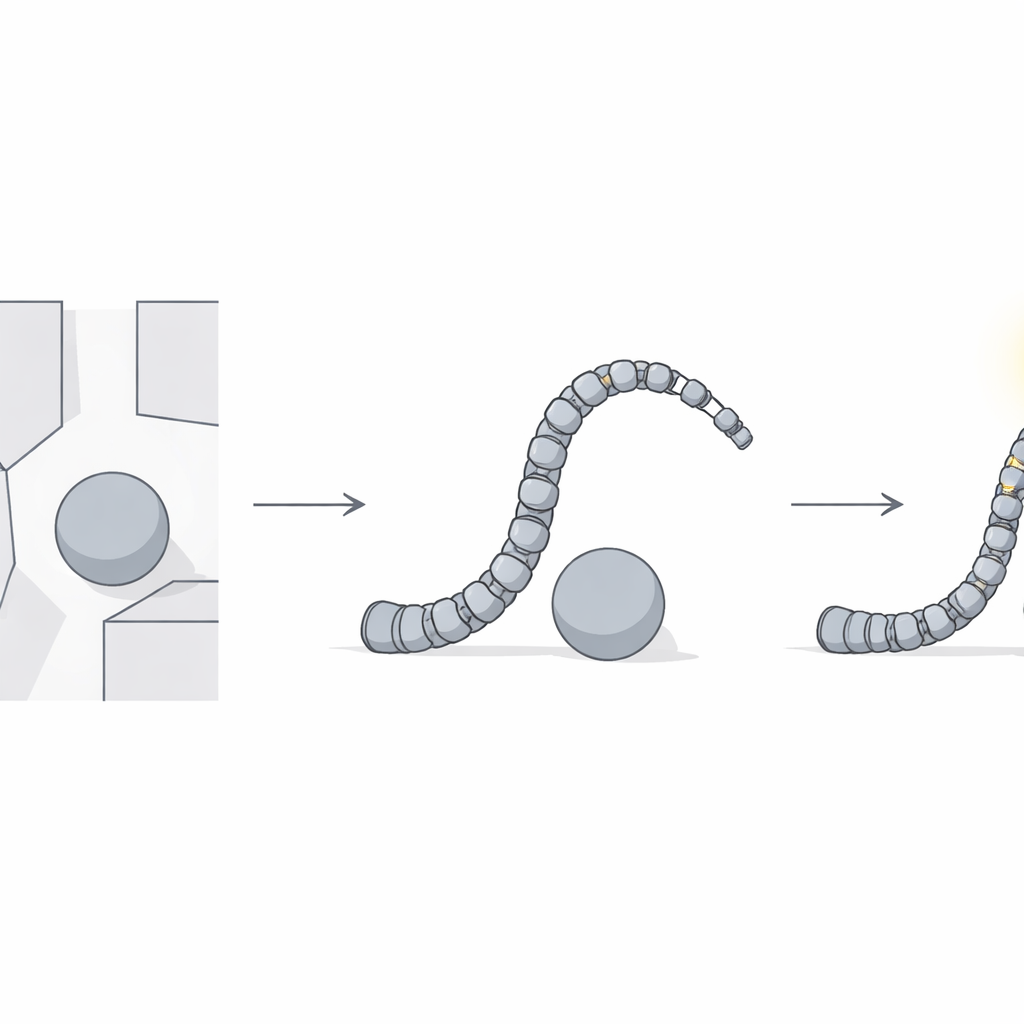
Beim Betrieb in beengten Umgebungen darf der Roboter nicht an nahegelegenen Objekten entlangschrammen. Statt nur die Mittellinie des Roboters zu prüfen, modellieren die Autoren jeden Abschnitt als aufgefüllte „Kapsel“ mit echtem Radius und behandeln Hindernisse als solide Formen mit eigener Größe. Während der Suche wird jede Kandidatenform, die mit einem Hindernis kollidieren würde, stark bestraft, wodurch es sehr unwahrscheinlich wird, dass sie als gute Lösung gewählt wird. In Computersimulationen folgte der Roboter erfolgreich sowohl geraden als auch kreisförmigen Pfaden und bog dabei elegant um eine feste Behinderung herum, während er gleichzeitig einen angemessenen Sicherheitsabstand einhielt.
Die Methode auf die Probe stellen
Das Team verglich ihre klassenzimmerinspirierte Suche mit drei anderen gängigen Optimierungsverfahren, die häufig im Ingenieurwesen eingesetzt werden. Über viele wiederholte Versuche fand ihr Ansatz konsequent extrem präzise Lösungen, ohne dass händisch abgestimmte Stellschrauben nötig waren, die die Konkurrenzmethoden verlangen. Sie trieben die Technik außerdem an komplexere Roboter mit drei flexiblen Abschnitten heran und zeigten damit, dass sie mit wachsender Entwurfsvielfalt skalierbar ist. Schließlich testeten sie die Methode an einem realen, rüsselähnlichen Roboter, der mit Luftdruck betrieben wird. Mithilfe von Sensormessungen, die die Bewegung des Roboters verfolgten, führten sie ihren Algorithmus offline aus, um vorherzusagen, wie sich die internen Kabel hätten bewegen sollen, und stellten fest, dass die vorhergesagten und gemessenen Kabellängen eng übereinstimmten – im Bereich von wenigen Millimetern.
Was das für zukünftige Roboter bedeutet
Anschaulich zeigt die Studie, dass sich ein flexibler, rüsselartiger Roboter fast so zuverlässig steuern lässt wie ein starrer Industrieroboterarm, selbst wenn er sich strecken, krümmen und Hindernissen ausweichen muss. Indem das Steuerungsproblem in eine geführte Suche verwandelt und Sicherheitsabstände direkt in die Zielfunktion eingebaut werden, liefern die Autoren ein praktisches Rezept, das sowohl in Simulationen als auch in Hardware funktioniert. Das legt den Grundstein für zukünftige Roboter, die sich sicher durch beengte Umgebungen schlängeln können – innerhalb von Maschinen, in Katastrophengebieten oder sogar im menschlichen Körper – und dabei dennoch die Präzision erreichen, die anspruchsvolle Aufgaben erfordern.
Zitation: Ghoul, A., Sattar, A.M., Adoul, M.A. et al. Obstacle-aware inverse kinematics of variable-length continuum robots via teaching–learning-based optimization with experimental validation. Sci Rep 16, 11227 (2026). https://doi.org/10.1038/s41598-026-46132-6
Schlüsselwörter: Kontinuumsroboter, weiche Robotik, Hindernisvermeidung, Bewegungsplanung, Optimierungsalgorithmen