Clear Sky Science · fr
Cinématique inverse consciente des obstacles pour robots continus à longueur variable via une optimisation basée sur l’enseignement-apprentissage avec validation expérimentale
Des robots qui bougent comme des trompes d’éléphant
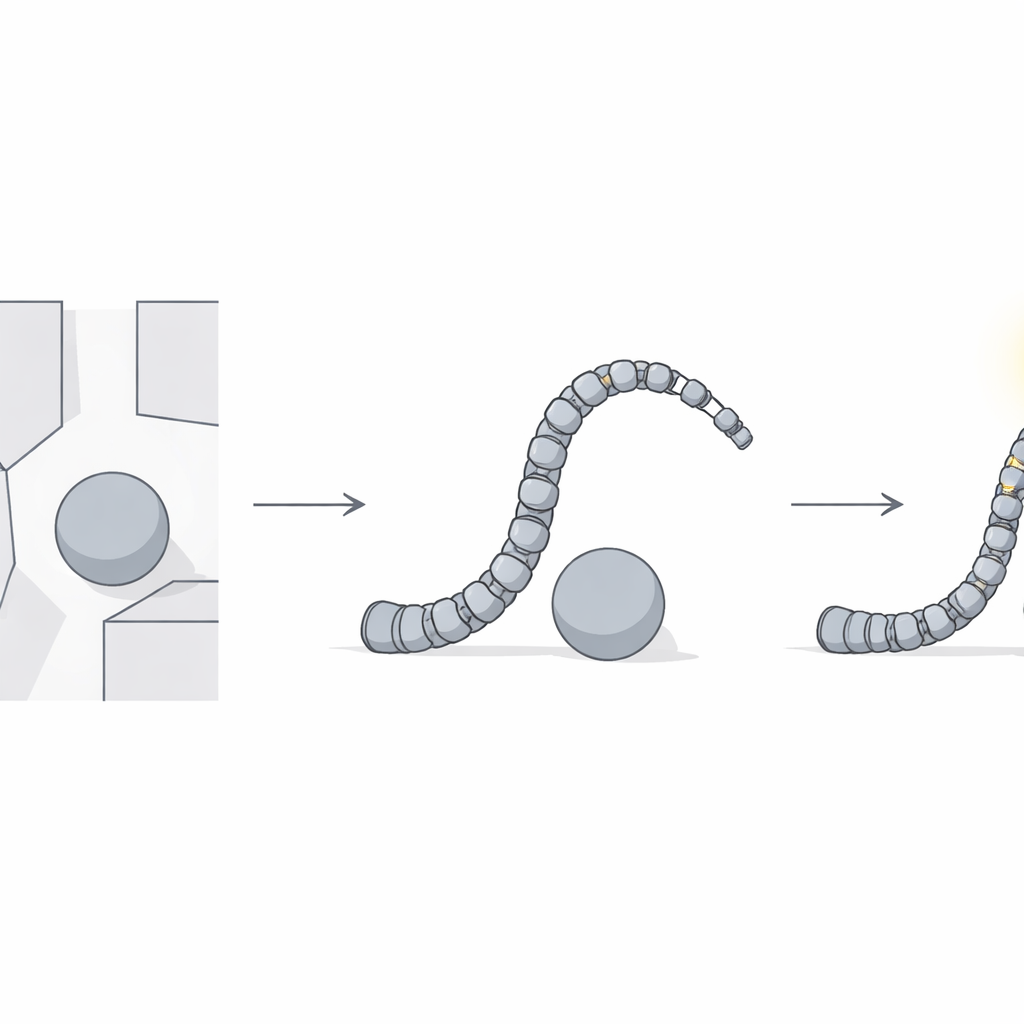
Imaginez un bras robotique capable de se courber, se tordre et se faufiler dans des décombres comme la trompe d’un éléphant qui serpente entre les branches. Ces « robots continus » sont des machines souples et flexibles conçues pour intervenir dans des espaces étroits ou dangereux, des bâtiments effondrés jusqu’à l’intérieur du corps humain. Cet article présente une nouvelle méthode pour piloter précisément ces robots, même lorsque leur longueur change et qu’ils contournent des obstacles en toute sécurité, rapprochant cette technologie futuriste d’une utilisation pratique.
Pourquoi les robots flexibles sont difficiles à contrôler
Contrairement aux bras rigides et articulés que l’on voit dans une usine automobile, les robots continus reposent sur des colonnes souples parcourues de câbles ou de tuyaux. Ils peuvent se courber en douceur dans de nombreuses directions et même s’étendre ou se contracter, ce qui leur confère une grande portée et agilité. Mais cette souplesse a un coût : prédire le mouvement de l’extrémité du robot lorsqu’on tire sur ses câbles est complexe, et remonter depuis une position d’extrémité souhaitée vers les bons réglages de câbles et de forme l’est encore davantage. Il existe souvent de multiples manières pour le robot d’atteindre un même point, et son comportement est fortement non linéaire, rendant difficiles l’application des formules classiques pas à pas.
Transformer la planification de mouvement en une recherche intelligente
Pour relever ce défi, les auteurs considèrent la planification de mouvement du robot comme un problème de recherche. Ils adoptent d’abord une approximation géométrique largement utilisée selon laquelle chaque section du robot se courbe comme un arc circulaire lisse. Avec ce modèle, tout choix particulier d’angles de courbure, d’orientations et de longueurs de section donne une position prédite de l’extrémité du robot. L’idée clé est alors de laisser un ordinateur explorer ces choix pour trouver la combinaison qui amène l’extrémité au plus près d’un point désiré dans l’espace, sous réserve des limites physiques sur l’amplitude de courbure ou d’extension des sections.
Apprendre dans une classe virtuelle
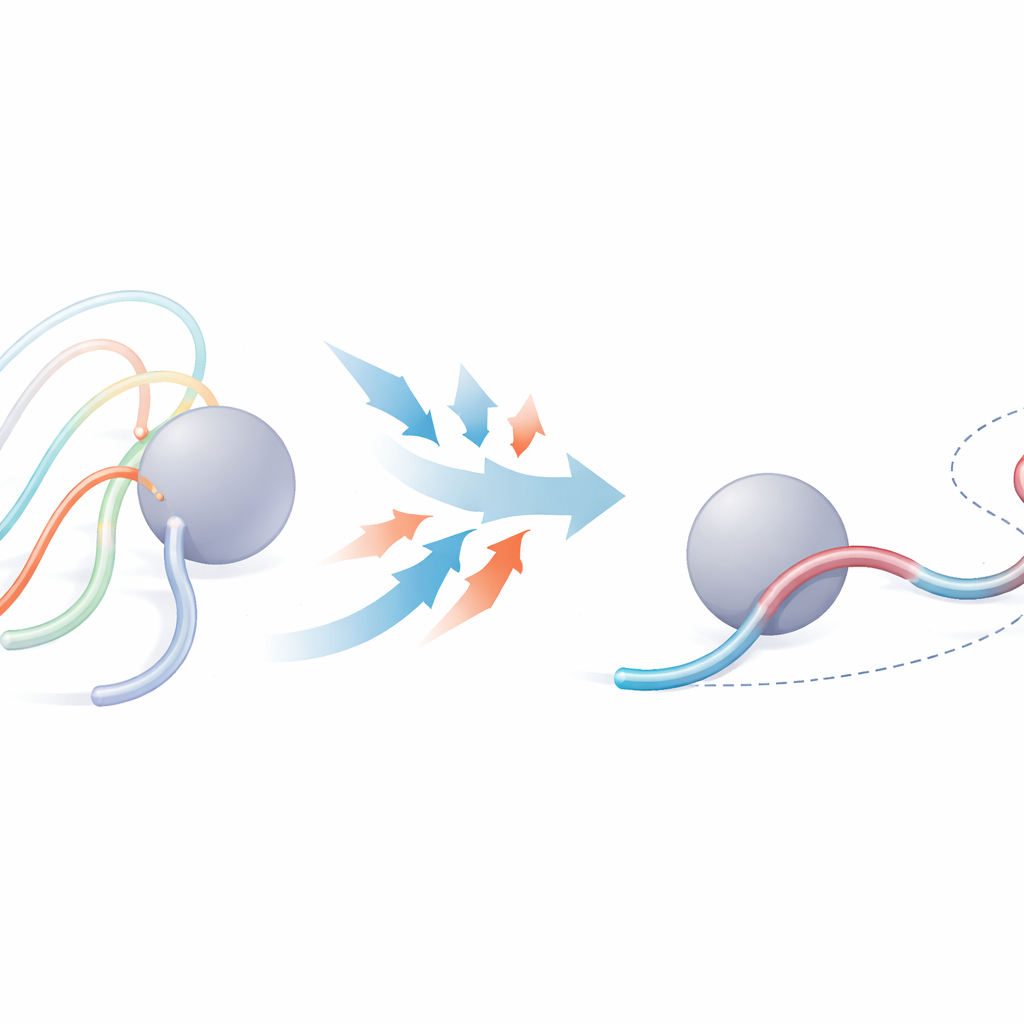
Le moteur de recherche au cœur de cette méthode s’appelle optimisation basée sur l’enseignement-apprentissage. Il imagine une salle de classe de « mousses étudiants », chacun représentant une solution candidate pour la façon dont le robot peut se plier et s’étirer. À chaque itération, le meilleur étudiant joue le rôle de « professeur », poussant les autres vers de meilleures performances, tandis que des paires d’étudiants apprennent aussi des différences entre eux. Au fil des itérations, cette classe virtuelle converge vers une configuration qui atteint très précisément le point cible. Une astuce simple rend le mouvement d’un point à l’autre fluide : lorsque le robot suit une trajectoire, la meilleure solution trouvée pour un point est réutilisée comme estimation initiale pour le point suivant, aidant à éviter des sauts brusques de forme.
Maintenir une distance de sécurité par rapport aux obstacles
Opérer dans des espaces encombrés signifie que le robot ne doit pas frotter contre les objets proches. Plutôt que de vérifier seulement la ligne médiane du corps du robot, les auteurs modélisent chaque section comme une « capsule » épaissie avec un vrai rayon, et traitent les obstacles comme des formes solides dotées de leur propre taille. Pendant la recherche, toute forme candidate qui entrerait en collision avec un obstacle est fortement pénalisée, la rendant très peu probable d’être retenue comme bonne solution. Dans des tests informatiques, le robot a suivi avec succès des trajectoires droites et circulaires tout en se courbant gracieusement autour d’une obstruction fixe, en maintenant une marge de sécurité appropriée.
Mettre la méthode à l’épreuve
L’équipe a comparé leur recherche inspirée de la salle de classe avec trois autres méthodes d’optimisation populaires en ingénierie. Sur de nombreux essais répétés, leur approche a systématiquement trouvé des solutions extrêmement précises sans nécessiter de réglages manuels, que les méthodes concurrentes exigent. Ils ont aussi poussé la technique vers des robots plus complexes à trois sections flexibles, montrant qu’elle monte en échelle à mesure que les conceptions deviennent plus capables. Enfin, ils ont testé la méthode sur un robot réel, en forme de trompe, actionné par pression d’air. En utilisant des mesures de capteurs suivant le mouvement du robot, ils ont exécuté leur algorithme hors ligne pour prédire comment les câbles internes auraient dû se mouvoir, et ont constaté que les longueurs de câble prédites et mesurées concordaient étroitement, à quelques millimètres près.
Ce que cela signifie pour les robots du futur
En termes concrets, l’étude montre qu’un robot souple, de type trompe, peut être guidé presque aussi fiablement qu’un bras industriel rigide, même lorsqu’il doit s’étirer, se courber et éviter des obstacles en chemin. En transformant le problème de pilotage en une recherche guidée et en intégrant des marges de sécurité directement dans l’objectif, les auteurs proposent une recette pratique qui fonctionne à la fois en simulation et sur matériel. Cela pose les bases de robots futurs capables de se faufiler en toute sécurité dans des environnements encombrés—à l’intérieur de machines, dans des zones sinistrées ou même dans le corps humain—tout en se déplaçant avec la précision requise par des tâches exigeantes.
Citation: Ghoul, A., Sattar, A.M., Adoul, M.A. et al. Obstacle-aware inverse kinematics of variable-length continuum robots via teaching–learning-based optimization with experimental validation. Sci Rep 16, 11227 (2026). https://doi.org/10.1038/s41598-026-46132-6
Mots-clés: robots continus, robotique souple, évitement d’obstacles, planification de mouvement, algorithmes d’optimisation