Clear Sky Science · pt
Cinemática inversa consciente de obstáculos para robôs contínuos de comprimento variável via otimização baseada em ensino–aprendizagem com validação experimental
Robôs que se movem como trombas de elefante
Imagine um braço robótico que pode se enrolar, torcer e se espremer por entre destroços do mesmo modo que a tromba de um elefante serpenteia entre galhos. Esses “robôs contínuos” são máquinas macias e flexíveis projetadas para atuar em espaços apertados ou perigosos, desde edifícios desabados até o interior do corpo humano. Este artigo apresenta uma nova maneira de direcionar com precisão esses robôs, mesmo quando seu comprimento corporal varia e eles precisam contornar obstáculos com segurança, aproximando essa tecnologia futurista de aplicações práticas.
Por que robôs flexíveis são difíceis de controlar
Diferentemente dos braços rígidos e articulados que você pode ver em uma fábrica de automóveis, robôs contínuos são construídos em torno de colunas vertebrais flexíveis por onde passam cabos ou tubos. Eles podem curvar-se suavemente em várias direções e até estender-se ou contrair-se, o que lhes confere grande alcance e agilidade. Mas essa flexibilidade tem um custo: prever como a ponta do robô vai se mover quando se puxa seus cabos é complicado, e trabalhar ao contrário — a partir de uma posição desejada da ponta até as configurações corretas de cabos e formas — é ainda mais difícil. Frequentemente existem muitas maneiras de o robô atingir o mesmo ponto, e seu movimento é fortemente não linear, tornando difíceis as fórmulas tradicionais passo a passo.
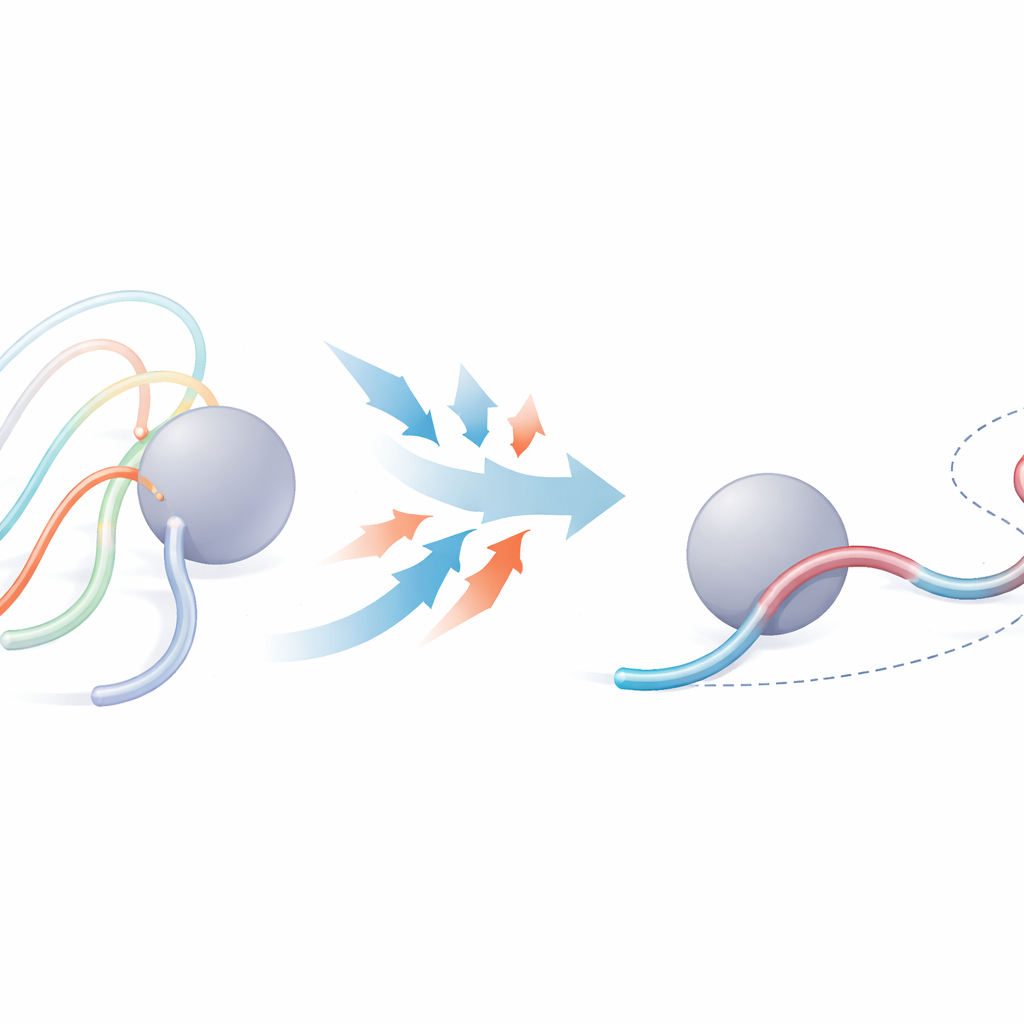
Transformando o planejamento de movimento em uma busca inteligente
Para enfrentar esse desafio, os autores tratam o planejamento do movimento do robô como um problema de busca. Primeiro, adotam uma aproximação geométrica amplamente usada em que cada seção do robô se curva como um arco circular suave. Com esse modelo, qualquer escolha específica de ângulos de curvatura, orientações e comprimentos das seções conduz a uma posição prevista da ponta do robô. A ideia-chave é então deixar que um computador pesquise entre essas escolhas para encontrar a combinação que faça a ponta chegar o mais próximo possível de um ponto desejado no espaço, sujeito a limites físicos sobre o quanto as seções podem dobrar ou estender.
Aprendendo numa sala de aula virtual
O mecanismo de busca no coração deste método chama-se otimização baseada em ensino–aprendizagem. Ele imagina uma sala de aula de “alunos”, cada um representando uma solução candidata de como o robô pode curvar-se e esticar-se. A cada rodada, o melhor aluno atua como “professor”, estimulando os demais a melhorarem seu desempenho, enquanto pares de alunos também aprendem com suas diferenças. Ao longo de muitas rodadas, essa turma virtual converge para uma configuração que atinge o ponto alvo com grande precisão. Um truque simples torna o movimento entre pontos suave: quando o robô se desloca ao longo de um trajeto, a melhor solução encontrada para um ponto é reutilizada como palpite inicial para o próximo, ajudando o robô a evitar saltos abruptos de forma.
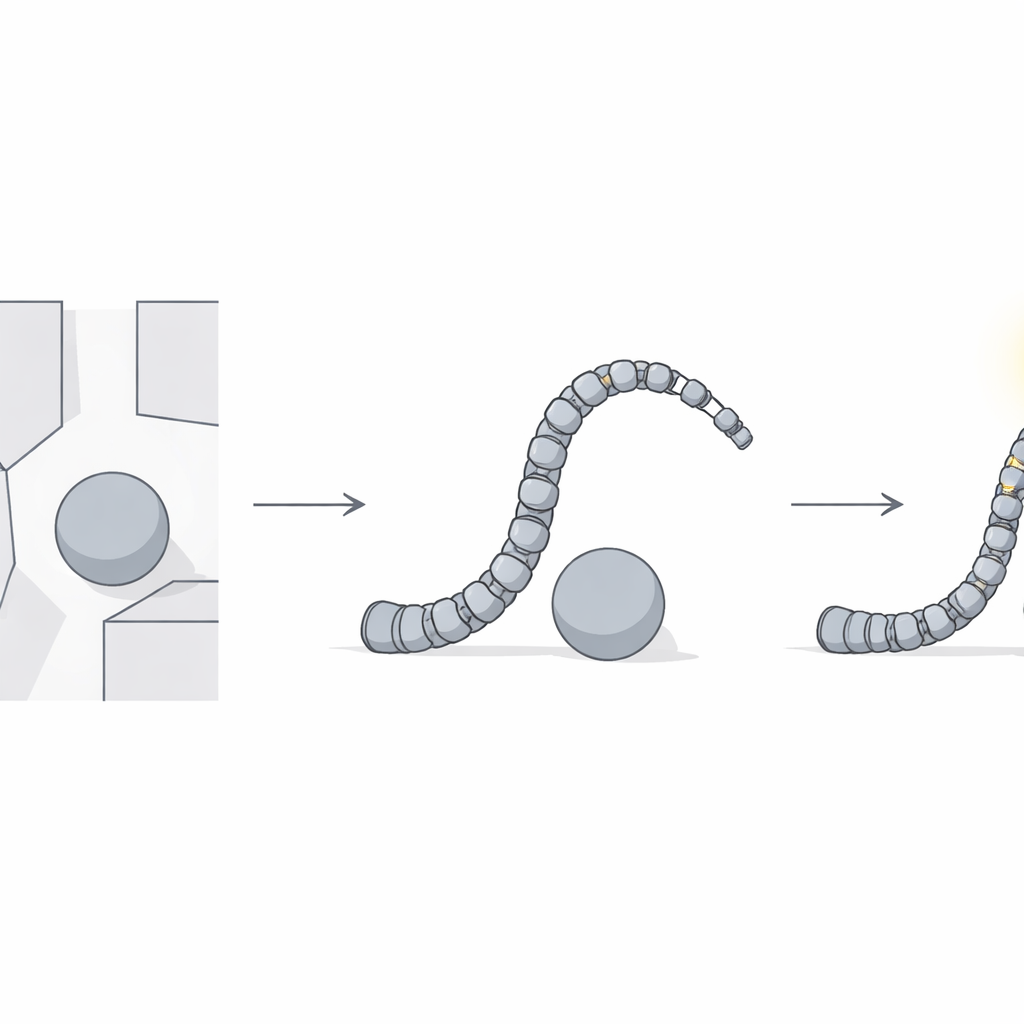
Mantendo uma distância segura de obstáculos
Operar em espaços entulhados significa que o robô não pode raspar contra objetos próximos. Em vez de verificar apenas a linha central do corpo do robô, os autores modelam cada seção como uma “cápsula” espessada com um raio real e tratam os obstáculos como formas sólidas com seu próprio tamanho. Durante a busca, qualquer forma candidata que colida com um obstáculo recebe uma penalização pesada, tornando-a muito improvável de ser escolhida como boa solução. Em testes computacionais, o robô seguiu com sucesso trajetórias retas e circulares enquanto se curvava graciosamente ao redor de uma obstrução fixa, mantendo ao mesmo tempo uma margem de segurança apropriada.
Colocando o método à prova
A equipe comparou sua busca inspirada na sala de aula com três outros métodos populares de otimização frequentemente usados em engenharia. Em muitos ensaios repetidos, sua abordagem encontrou consistentemente soluções extremamente precisas sem precisar de manípulos de controle ajustados manualmente, os quais os métodos concorrentes requerem. Eles também levaram a técnica a robôs mais complexos com três seções flexíveis, mostrando que ela escala conforme os projetos se tornam mais capazes. Por fim, testaram o método em um robô real, com aparência de tromba, acionado por pressão de ar. Usando medições de sensores que rastrearam o movimento do robô, executaram seu algoritmo offline para prever como os cabos internos deveriam ter se movido e descobriram que os comprimentos de cabo previstos e medidos coincidiram de perto, dentro de poucos milímetros.
O que isso significa para robôs do futuro
Em termos práticos, o estudo mostra que um robô flexível, em forma de tromba, pode ser guiado quase com a mesma confiabilidade de um braço industrial rígido, mesmo quando precisa estender-se, enrolar-se e desviar de obstáculos pelo caminho. Ao transformar o problema de comando em uma busca guiada e incorporar margens de segurança diretamente no objetivo, os autores oferecem uma receita prática que funciona tanto em simulações quanto em hardware. Isso estabelece as bases para robôs futuros que possam deslocar-se com segurança por ambientes congestionados — dentro de máquinas, zonas de desastre ou mesmo no corpo humano — mantendo a precisão exigida por tarefas de alta demanda.
Citação: Ghoul, A., Sattar, A.M., Adoul, M.A. et al. Obstacle-aware inverse kinematics of variable-length continuum robots via teaching–learning-based optimization with experimental validation. Sci Rep 16, 11227 (2026). https://doi.org/10.1038/s41598-026-46132-6
Palavras-chave: robôs contínuos, robótica macia, evitação de obstáculos, planejamento de movimento, algoritmos de otimização