Clear Sky Science · sv
Hinder-aware invers kinematik för kontinuerliga robotar med variabel längd via teaching–learning-baserad optimering med experimentell validering
Robotar som rör sig som elefanttryn
Föreställ dig en robotarm som kan krulla, vrida sig och pressa sig genom vrak på samma sätt som en elefanttrunk slingrar sig mellan trädgrenar. Sådana ”kontinuerliga robotar” är mjuka, flexibla maskiner avsedda för arbete i trånga eller farliga miljöer, från kollapsade byggnader till insidan av den mänskliga kroppen. Denna artikel presenterar ett nytt sätt att styra dessa robotar exakt, även när deras kroppslängd förändras och de slingrar sig säkert runt hinder, vilket för tekniken närmare praktisk användning.
Varför flexibla robotar är svåra att kontrollera
Till skillnad från de styva, ledade armar du kan se i en bilfabrik är kontinuerliga robotar byggda kring böjliga ryggrader genomdragna med kablar eller rör. De kan kurva mjukt i många riktningar och till och med förlängas eller dras ihop, vilket ger stor räckvidd och smidighet. Men denna flexibilitet kostar: att förutsäga hur robotens spets rör sig när man drar i kablarna är komplicerat, och att gå baklänges från en önskad spetsposition till rätt kabel- och forminställningar är ännu svårare. Det finns ofta många sätt för roboten att nå samma punkt, och dess rörelser är starkt icke-linjära, vilket gör traditionella steg-för-steg-formler svåra att använda.
Att göra rörelseplanering till en smart sökning
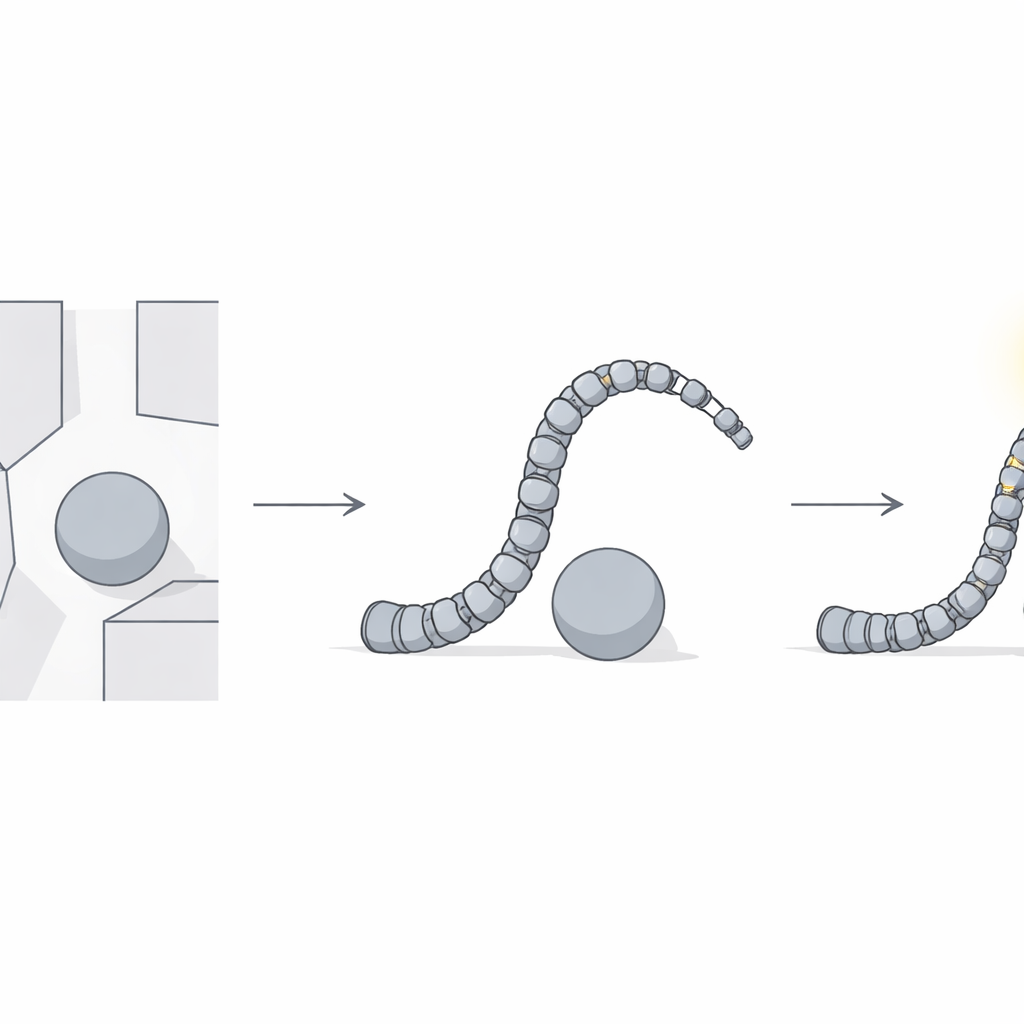
För att ta itu med denna utmaning behandlar författarna robotens rörelseplanering som ett sökproblem. De antar först en allmänt använd geometrisk approximation där varje sektion av roboten böjer sig som en jämn cirkulär båge. Med denna modell leder ett specifikt val av böjvinklar, orienteringar och sektionslängder till en förutsagd position för robotens spets. Nyckelidén är sedan att låta en dator söka bland dessa val för att hitta den kombination som får spetsen att hamna så nära som möjligt en önskad punkt i rummet, med hänsyn till fysiska begränsningar för hur mycket sektionerna kan böjas eller förlängas.
Lära av ett virtuellt klassrum
Sökmotorn i kärnan av metoden kallas teaching–learning-baserad optimering. Den föreställer sig ett klassrum av ”studenter”, där varje student representerar ett kandidat-sätt för roboten att böja och sträcka sig. Vid varje omgång agerar den bästa studenten som en ”lärare” och knuffar de andra mot bättre prestation, samtidigt som par av studenter lär sig av varandras skillnader. Över många omgångar konvergerar denna virtuella klass till en konfiguration som mycket nära träffar målpunkten. Ett enkelt knep gör rörelsen mellan punkter mjuk: när roboten förflyttas längs en bana återanvänds den bästa lösningen som hittats för en punkt som startgissning för nästa, vilket hjälper roboten att undvika plötsliga formskiften.
Hålla ett säkert avstånd från hinder
Att arbeta i röriga miljöer innebär att roboten inte får skrapa mot närliggande objekt. Istället för att endast kontrollera robotens mittlinje modellerar författarna varje sektion som en förtjockad ”kapsel” med en verklig radie, och behandlar hinder som solida former med egen storlek. Under sökningen straffas varje kandidatkonfiguration som skulle kollidera med ett hinder kraftigt, vilket gör det mycket osannolikt att den väljs som en bra lösning. I datortester följde roboten framgångsrikt både raka och cirkulära banor samtidigt som den elegant böjde sig runt ett fast hinder, allt medan den upprätthöll ett lämpligt säkerhetsmarginal.
Sätta metoden på prov
Teamet jämförde sin klassrumsinspirerade sökning med tre andra populära optimeringsmetoder som ofta används inom ingenjörsarbete. I många upprepade försök hittade deras metod konsekvent extremt precisa lösningar utan att kräva handjusterade kontrollparametrar, vilket de konkurrerande metoderna behövde. De pressade också tekniken till mer komplexa robotar med tre flexibla sektioner och visade att den skalar när konstruktionerna blir mer kapabla. Slutligen testade de metoden på en verklig, trunkliknande robot som drivs av lufttryck. Med mätningar från sensorer som följde robotens rörelse körde de sin algoritm offline för att förutsäga hur de interna kablarna borde ha rört sig, och fann att de förutsagda och uppmätta kabellängderna matchade nära, inom några millimeter.
Vad detta betyder för framtida robotar
I vardagliga termer visar studien att en flexibel, trunklik robot kan styras nästan lika tillförlitligt som en styv industriarm, även när den måste sträcka sig, krulla och undvika hinder på vägen. Genom att omvandla styrproblemet till en vägledd sökning och integrera säkerhetsmarginaler direkt i målfunktionen ger författarna ett praktiskt recept som fungerar både i simuleringar och i hårdvara. Detta lägger grunden för framtida robotar som säkert kan slingra sig genom trånga miljöer — inuti maskiner, i katastrofzoner eller till och med i människokroppen — samtidigt som de fortfarande rör sig med den precision som krävande uppgifter kräver.
Citering: Ghoul, A., Sattar, A.M., Adoul, M.A. et al. Obstacle-aware inverse kinematics of variable-length continuum robots via teaching–learning-based optimization with experimental validation. Sci Rep 16, 11227 (2026). https://doi.org/10.1038/s41598-026-46132-6
Nyckelord: kontinuerliga robotar, mjukrobotik, hinderundvikande, rörelseplanering, optimeringsalgoritmer