Clear Sky Science · he
אבולוציית קינות הפוכת מודעת למכשולים של רובוטים קונטינואיים בעלי אורך משתנה באמצעות אופטימיזציה מבוססת הוראה–למידה עם אימות ניסיוני
רובוטים שנעים כמו חדקי פיל
דמיינו זרוע רובוטית שיכולה להתעקל, להתלפף ולהתפח בין הריסות כפי שחדק פיל נשלח בין ענפי עצים. "רובוטים קונטינואיים" כאלה הם מכונות רכות וגמישות שנועדו לעבוד במקומות צרים או מסוכנים, מהמבנים הממוטטים ועד פנים הגוף האנושי. המאמר הזה מציג דרך חדשה להכוון מדויק של רובוטים אלה, גם כאשר אורך גופם משתנה והם מתפתלים בבטחה סביב מכשולים, ובכך מקרב את הטכנולוגיה העתידנית הזו לשימוש מעשי.
למה רובוטים גמישים קשים לשליטה
לא כמו הזרועות הקשות והממוכנות שאפשר לראות במפעל רכב, רובוטים קונטינואיים בנויים סביב עמוד שדרה גמיש המחובר בכבלי או בצינורות. הם יכולים להתעקל באופן חלק בכיוונים רבים ואפילו להתרחב או להתכווץ, מה שמעניק להם טווח ומהירות פעולה מרשימים. אבל גמישות זו עולה במחיר: חיזוי התנועה של קצה הרובוט כשמרימים כבל הוא מסובך, והפוך מהמצב—למצוא את ההגדרות הנכונות של הכבלים והמבנה כדי להגיע למיקום רצוי—קשה עוד יותר. יש לעיתים רבות מספר דרכים שבהן הרובוט יכול להגיע לאותה נקודה, והתנועה שלו highly nonlinear, מה שהופך נוסחאות צעדים-אחר-צעדים מסורתיות לקשות ליישום.
הפיכת תכנון התנועה לחיפוש חכם
כדי להתמודד עם האתגר, המחברים מתייחסים לתכנון התנועה של הרובוט כבעיה של חיפוש. הם מאמצים תחילה קירוב גאומטרי נפוץ שבו כל מקטע של הרובוט מתעקל כקטע מעגלי חלק. עם המודל הזה, כל בחירה מסוימת של זוויות עיקום, סיבובים ואורכי מקטעים מובילה לחיזוי מיקום קצה הרובוט. הרעיון המרכזי הוא לאפשר למחשב לחפש בין הבחירות הללו כדי למצוא את הצירוף שגורם לקצה לנחות כמה שיותר קרוב לנקודה הרצויה בחלל, בכפוף למגבלות פיזיות על עד כמה המקטעים יכולים להתעקל או להימתח.
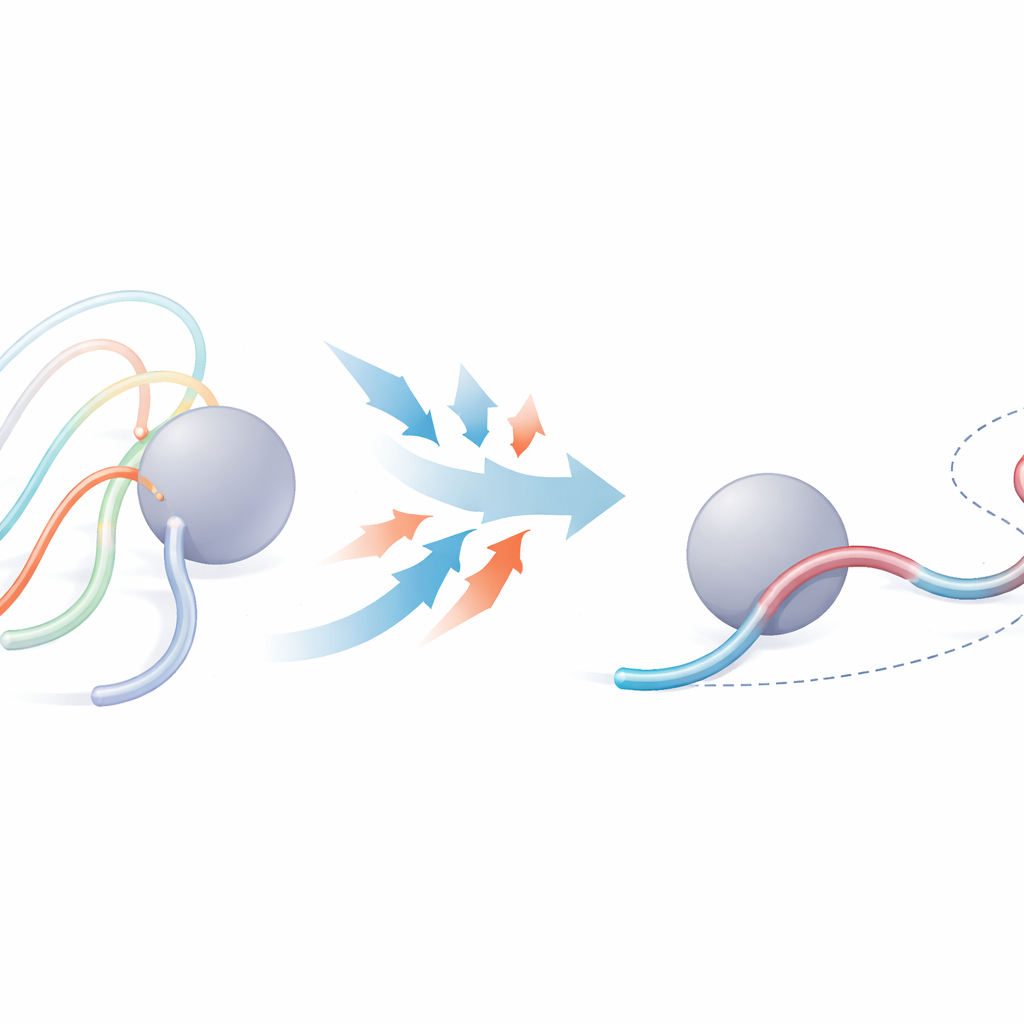
למידה מתוך כיתה וירטואלית
מנוע החיפוש שביסוד השיטה נקרא אופטימיזציה מבוססת הוראה–למידה. הוא מדמה כיתה של "תלמידים", שכל אחד מייצג הצעה אפשרית לאופן שבו הרובוט יתעקל ויתארך. בכל סבב, התלמיד הטוב ביותר מתפקד כ"מורה" ודוחף את האחרים לכיוון ביצועים טובים יותר, בזמן שזוגות תלמידים לומדים גם מתוך ההבדלים ביניהם. על פני סבבים רבים, הכיתה הווירטואלית מתכנסת לקונפיגורציה שפוגעת במטרה בדיוק רב. תמרון פשוט מיישר את התנועה בין נקודות: כשהרובוט נע לאורך מסלול, הפתרון הטוב ביותר שנמצא לנקודה אחת משמש כניחוש התחלתי לנקודה הבאה, ועוזר להימנע ממעברים פתאומיים בצורתו.
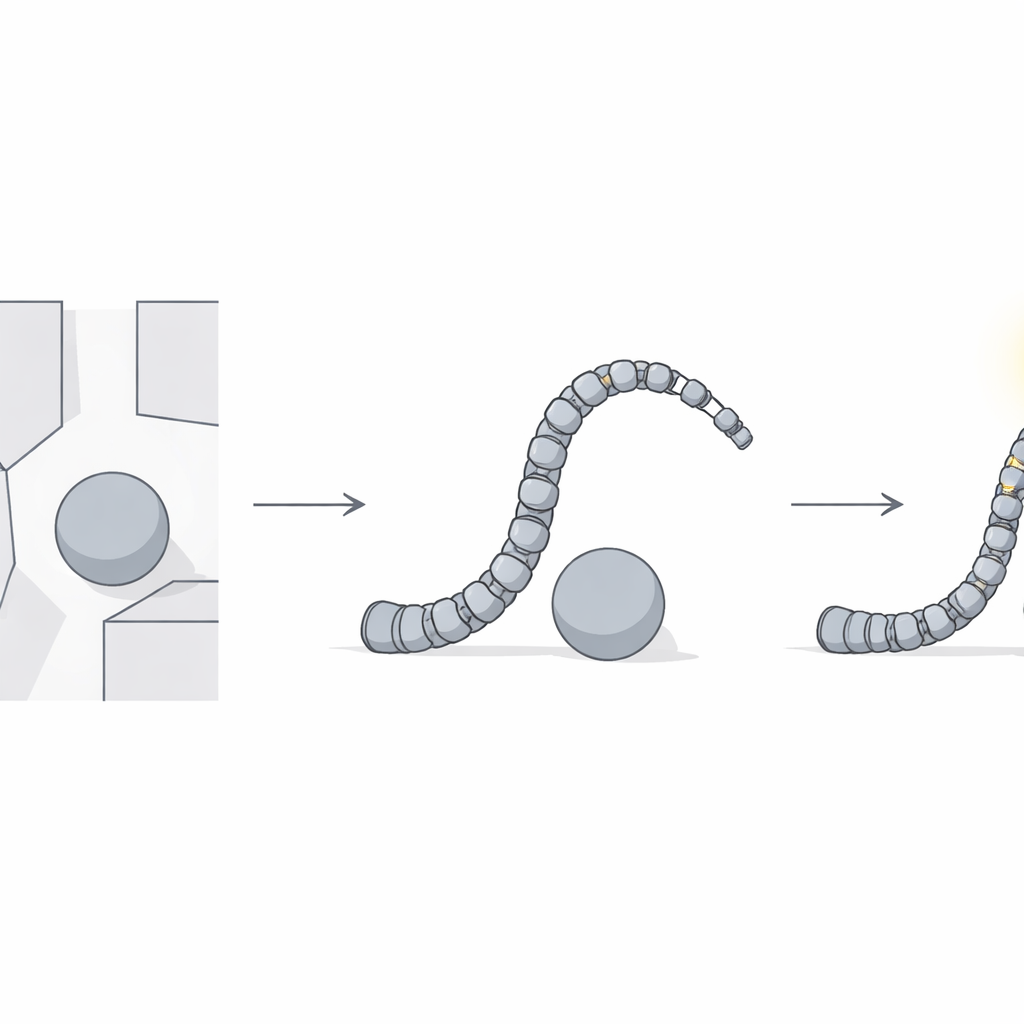
שמירה על מרחק בטוח ממכשולים
פעולה במרחבים צפופים מחייבת שהרובוט לא ישפשף בחפצים סמוכים. במקום לבדוק רק את קו האמצע של גוף הרובוט, המחברים מדגמים כל מקטע כ"קפסולה" מעובה בעלת רדיוס ממשי, ומתייחסים למכשולים כצורות מוצקות עם ממדים משלהם. במהלך החיפוש, כל צורת מועמד שתתנגש עם מכשול תקבל עונש כבד, מה שהופך את בחירתה לפתרון סביר לבלתי סבירה. במבחני מחשב, הרובוט עקב בהצלחה גם מסלולים ישרים וגם מעגליים בעודו מתעקל בנעימות סביב מכשול קבוע, וכל זאת תוך שמירה על מרווח בטיחות הולם.
השמת השיטה למבחן
הצוות השווה את חיפוש ההשראה-כיתתי שלהם עם שלוש שיטות אופטימיזציה פופולריות נוספות הנמצאות בשימוש מהנדסי. בחזרות רבות, הגישה שלהם מצאה באופן עקבי פתרונות מדויקים מאוד ללא צורך בכיבוי או כיוון ידני של פרמטרים, אשר שיטות המתחרות אכן צריכות. הם גם הרחיבו את הטכניקה לרובוטים מורכבים יותר עם שלושה מקטעים גמישים, והראו שהיא מתדרגת כאשר העיצובים הופכים יותר מתקדמים. לבסוף, הם בחנו את השיטה על רובוט אמיתי בדומה לחדק, המונע על ידי לחץ אוויר. באמצעות מדידות מחיישנים שעקבו אחרי תנועת הרובוט, הריצו את האלגוריתם באופן לא-מקוון כדי לחזות כיצד כבלי הפנים היו צריכים לזוז, ומצאו שאורכי הכבלים החזויים והתוצאתיים התאימו זה לזה במידה קרובה, בטווח של כמה מילימטרים.
מה משמעות הדבר עבור רובוטים עתידיים
במונחים יומיומיים, המחקר מראה כי ניתן להנחות רובוט גמיש בדומה כמעט באמינות לזרוע תעשייתית נוקשה, אפילו כאשר עליו להתארך, להתעקל ולהתחמק ממכשולים בדרך. על ידי הפיכת בעיית ההיגוי לחיפוש מונחה ושילוב מרווחי בטיחות ישירות בפונקציית המטרה, המחברים מציעים מתכון מעשי שעובד גם בסימולציות וגם בחומרה. זה מהווה בסיס לרובוטים עתידיים היכולים להפשיל את דרכם בבטחה דרך סביבות צפופות—בתוך מכונות, באזורי אסון או אפילו בגוף האדם—ובו בזמן לנוע בדיוק שדרישות מטלות תובעניות מחייבות.
ציטוט: Ghoul, A., Sattar, A.M., Adoul, M.A. et al. Obstacle-aware inverse kinematics of variable-length continuum robots via teaching–learning-based optimization with experimental validation. Sci Rep 16, 11227 (2026). https://doi.org/10.1038/s41598-026-46132-6
מילות מפתח: רובוטים קונטינואיים, רובוטיקה רכה, הימנעות ממכשולים, תכנון תנועה, אלגוריתמי אופטימיזציה