Clear Sky Science · nl
Obstacle-aware inverse kinematics of variable-length continuum robots via teaching–learning-based optimization with experimental validation
Robots That Move Like Elephant Trunks
Stel je een robotarm voor die zich kan oprollen, verdraaien en zich een weg kan wringen door puin zoals de slurf van een olifant zich tussen takken door slingert. Dergelijke “continuümrobots” zijn zachte, flexibele machines ontworpen voor werk op krappe of gevaarlijke locaties, van ingestorte gebouwen tot het binnenste van het menselijk lichaam. Dit artikel introduceert een nieuwe methode om deze robots nauwkeurig te sturen, zelfs terwijl hun lichaamslengte verandert en ze veilig om obstakels heen bewegen, waarmee deze futuristische technologie dichter bij praktisch gebruik komt.
Why Flexible Robots Are Hard to Control
In tegenstelling tot de stijve, gewrichtsgebaseerde armen die je bijvoorbeeld in een autofabriek ziet, zijn continuümrobots opgebouwd rond buigzame ruggengraatachtige structuren met doorgevoerde kabels of buisjes. Ze kunnen netjes in meerdere richtingen krommen en zelfs verlengen of inkorten, wat ze veel bereik en behendigheid geeft. Maar die flexibiliteit heeft een prijs: voorspellen hoe de punt van de robot beweegt als je aan de kabels trekt is ingewikkeld, en terugrekenen van een gewenste punt naar de juiste kabel- en vorminstellingen is nog moeilijker. Vaak zijn er meerdere manieren om hetzelfde punt te bereiken, en de bewegingen zijn sterk niet-lineair, waardoor traditionele stapsgewijze formules moeilijk toepasbaar zijn.
Turning Motion Planning into a Smart Search
Om deze uitdaging aan te pakken, benaderen de auteurs de bewegingsplanning als een zoekprobleem. Ze nemen eerst een veelgebruikte geometrische benadering aan waarbij elk deel van de robot buigt als een gladde cirkelboog. Met dit model leidt elke specifieke keuze van buighoeken, oriëntaties en sectielengtes tot een voorspelde positie van de robotpunt. Het kernidee is vervolgens een computer te laten zoeken over deze keuzes om de combinatie te vinden die de punt zo dicht mogelijk bij een gewenst punt in de ruimte brengt, binnen de fysieke grenzen van hoe ver secties kunnen buigen of uitrekken.
Learning From a Virtual Classroom
De zoekmotor in het hart van deze methode heet teaching–learning-based optimization. Ze stelt zich een klaslokaal voor met “studenten”, waarbij elke student een kandidaatvoorstel voor de buiging en uitrekking van de robot voorstelt. In elke ronde fungeert de beste student als “docent” en stuurt de anderen richting betere prestaties, terwijl paren studenten ook van elkaars verschillen leren. Na vele rondes convergeert deze virtuele klas naar een configuratie die zeer dicht bij het doelpunt komt. Een eenvoudige truc maakt de beweging van punt naar punt vloeiend: wanneer de robot langs een pad beweegt, wordt de beste gevonden oplossing voor één punt hergebruikt als begingissing voor het volgende punt, waardoor plotselinge sprongen in vorm worden vermeden.
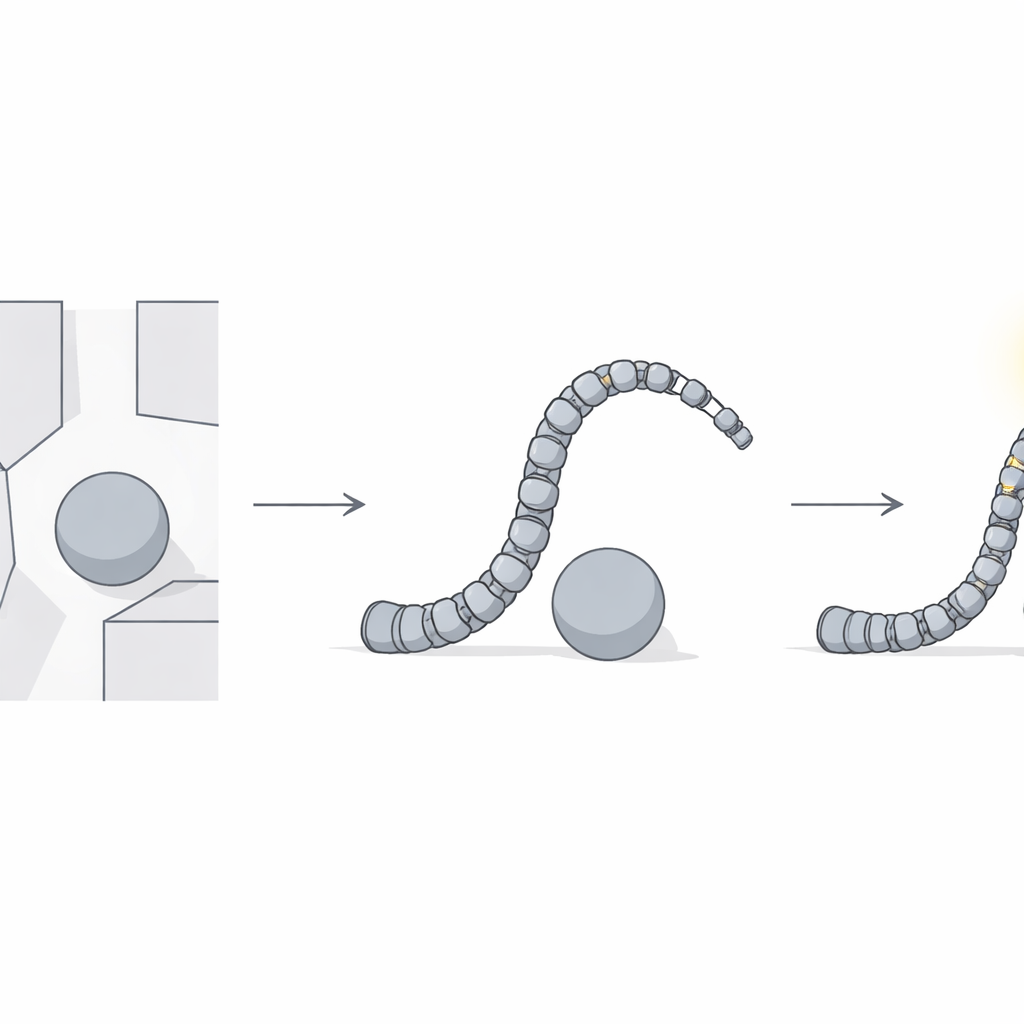
Keeping a Safe Distance From Obstacles
Werken in rommelige omgevingen betekent dat de robot niet langs nabijgelegen objecten mag schrapen. In plaats van alleen de middenlijn van het robotlichaam te controleren, modelleren de auteurs elk segment als een verdikte “capsule” met een reële straal, en behandelen ze obstakels als solide vormen met hun eigen omvang. Tijdens de zoektocht wordt elke kandidaatvorm die met een obstakel zou botsen zwaar bestraft, waardoor die vrijwel zeker niet als goede oplossing wordt gekozen. In computertests volgde de robot zowel rechte als cirkelvormige paden terwijl hij elegant om een vaste obstructie heen boog, en daarbij een passende veiligheidsmarge handhaafde.
Putting the Method to the Test
Het team vergeleek hun op een klas geïnspireerde zoekmethode met drie andere populaire optimalisatiemethoden die vaak in de techniek worden gebruikt. Over vele herhaalde proeven vond hun benadering consequent uiterst nauwkeurige oplossingen zonder handmatig afgestelde regelaars, die de concurrerende methoden wel vereisen. Ze zetten de techniek ook in op complexere robots met drie flexibele secties, en toonden aan dat de methode schaalt naarmate ontwerpen geavanceerder worden. Ten slotte testten ze de methode op een echte, slurfachtige robot die door luchtdruk werd aangedreven. Met metingen van sensoren die de beweging van de robot volgden, draaiden ze hun algoritme offline om te voorspellen hoe de interne kabels hadden moeten bewegen, en vonden dat de voorspelde en gemeten kabellengtes nauw overeenkwamen, binnen enkele millimeters.
What This Means for Future Robots
In alledaagse bewoordingen laat de studie zien dat een flexibele, slurfachtige robot bijna net zo betrouwbaar gestuurd kan worden als een stijve industriële arm, zelfs wanneer hij zich moet uitrekken, oprollen en obstakels ontwijken. Door het stuurprobleem om te zetten in een geleide zoektocht en veiligheidsmarges direct in het doel op te nemen, bieden de auteurs een praktische aanpak die zowel in simulaties als op hardware werkt. Dit legt de grondslag voor toekomstige robots die veilig hun weg kunnen wurmen door drukke omgevingen—binnen machines, rampgebieden of zelfs het menselijk lichaam—terwijl ze toch de precisie leveren die veeleisende taken vereisen.
Bronvermelding: Ghoul, A., Sattar, A.M., Adoul, M.A. et al. Obstacle-aware inverse kinematics of variable-length continuum robots via teaching–learning-based optimization with experimental validation. Sci Rep 16, 11227 (2026). https://doi.org/10.1038/s41598-026-46132-6
Trefwoorden: continuum robots, soft robotics, obstacle avoidance, motion planning, optimization algorithms