Clear Sky Science · zh
通过“后座驾驶”架构让自主水下滑翔机通过鲸声被动跟随抹香鲸
波涛下的倾听机器人
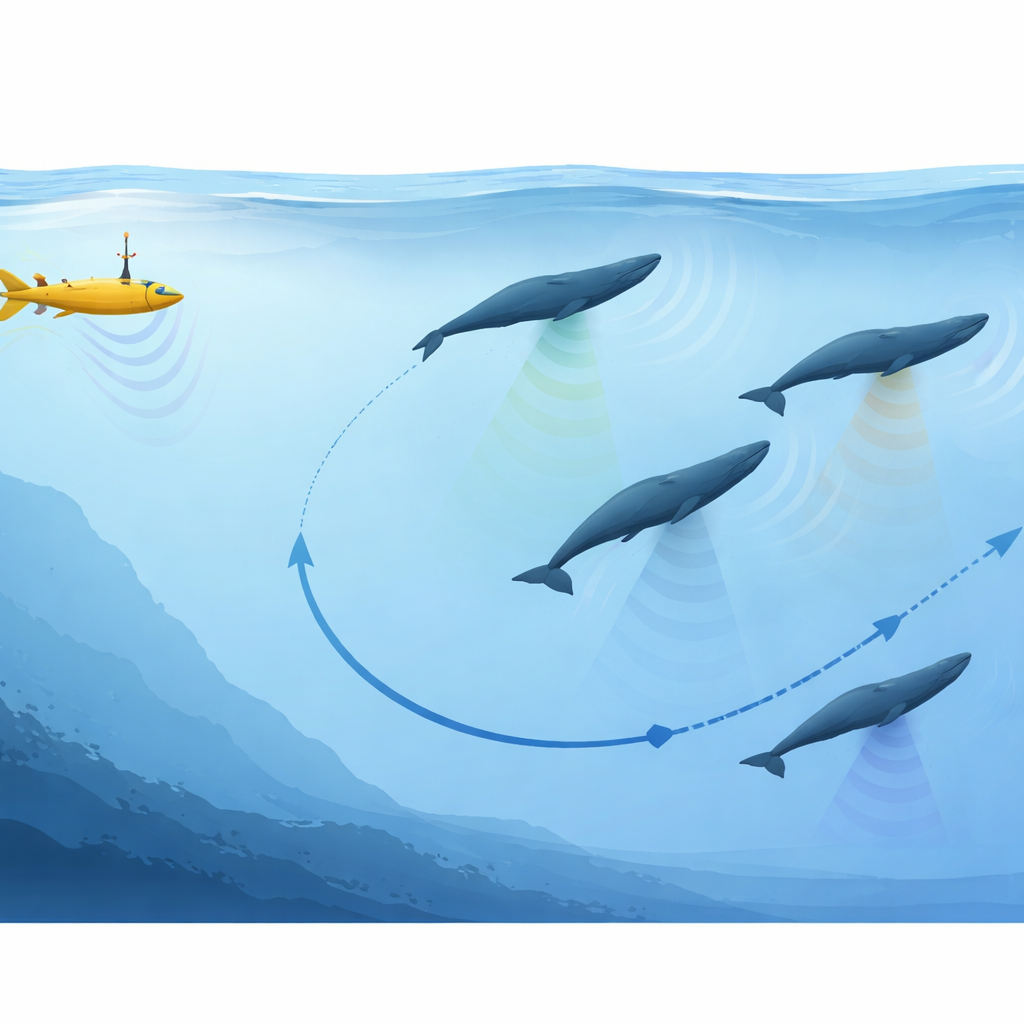
想象一下,不是用船只追逐或把设备绑在动物身上,而是静静地与它并行漂浮,仅靠倾听就能追踪地球上体型最大的动物之一。该研究描述了一种利用自主水下滑翔机“窃听”抹香鲸点击声并据此自主航向,从而在长时间尺度上跟随抹香鲸的新方法。这种方法有望实现更温和、持续更久的观测,深化我们对鲸类行为的理解并帮助保护这些非凡的动物。
为什么跟随鲸声很重要
抹香鲸的大部分生活在海面深处,潜水数百米并用高速点击和有模式的“咔哒音”交流。生物学家希望将这些声音与特定行为、家族关系和移动模式联系起来,但目前大多数工具难以做到这一点。浮标或船载麦克风只在鲸鱼附近时有效,而吸盘式标签在相对较短时间后会脱落。这就使得研究个体和群体在穿越公海时数日到数周的行为与交流变得困难。
作为水下侦察兵的无声滑翔机
研究人员转向一种不同类型的机器人:水下滑翔机。与螺旋桨驱动的潜艇不同,滑翔机通过改变浮力并移动内部电池来在缓慢、平滑的弧线中上升或下潜。这种设计极其节能且非常安静,能支持持续数周或数月的任务。在Project CETI–SeaExplorer滑翔机上,团队在机头安装了一个紧凑的四麦克风阵列,呈小型三维布局。随着滑翔机在数十到数百米之间潜升降,这个阵列持续记录水下声景,同时航行器的主计算机负责飞行任务。
倾听并操舵的“后座大脑”
为了将滑翔机变成鲸鱼跟随器,作者们增加了他们称之为“后座驾驶”的装置——第二台机载计算机,监听进入的声音并可建议航向变化。这个科学控制器运行在机器人软件框架内,接入滑翔机的所有传感器。首先,它检测抹香鲸产生的清晰宽带点击声,将其与诸如虾类爆裂声或海浪等背景噪声区分开来。然后通过比较四个麦克风之间极小的到达时间差,估计每次点击的来向。通过随时间和方向对点击进行分组,系统能将重叠的点击列分离为独立声源,有效地区分同时发声的多只鲸。
选择要跟随的那只鲸
一旦点击被分拣,后座驾驶会选择一个“目标”鲸,通常是点击最强或最频繁的那只,这通常表明它是最近的个体。控制器将测得的方位转换为滑翔机的新期望航向,并将该命令发送给主导航计算机。滑翔机会通过缓慢旋转内部电池来转向目标,同时继续其潜升模式。为避免持续的锯齿形航迹,听音过程在每次航向改变后会暂停预设时间,当鲸的信号清晰且响亮时暂停时间更短。整个过程中,内置的安全检查确保任何请求的深度或角度都在滑翔机的操作极限内。
海上测试系统
团队进行了两次主要试验。在法国南部近海的一次受控实验中,他们从一艘船上悬挂水下扬声器,回放记录的抹香鲸点击声,同时滑翔机执行一系列潜航。每当滑翔机听到点击声,后座驾驶就计算出船只的方向并下达新航向。记录数据显示,滑翔机在数十秒内开始响应新指令,通常在几分钟内对准,方向误差仅为几度到约十五度。第二次部署在多米尼加附近检验了完整听音流程对真实鲸群的表现。在那里,滑翔机在仅几秒数据内就检测到数十次点击,并将其分离为最多七个不同的点击源,每个源都具有稳定的方向,展示出它能够在繁忙的水下声景中区分多只鲸。
讲述鲸类故事的新工具
这项工作表明,一台安静、缓慢移动的水下滑翔机可以作为抹香鲸耐心的伴侣,仅凭动物自身的声音来自主调整航向。尽管长期、连续跟踪仍是未来任务的目标,已经证明的系统表明,机载倾听可以安全地引导滑翔机并辨明谁在何处发声。经过进一步改进,成群的此类滑翔机可以构建丰富的长期记录,将鲸群移动、潜水模式和声学交流联系起来——帮助科学家拼凑出这些深海巨兽的社会生活与交流系统,同时将人为干扰降到最低。
引用: Diamant, R., Pewzner, Y., Gubnitsky, G. et al. Backseat driver architecture to passively follow sperm whales by their voices with an autonomous underwater glider. Sci Rep 16, 8738 (2026). https://doi.org/10.1038/s41598-026-43138-y
关键词: 抹香鲸, 水下滑翔机, 被动声学监测, 自主海洋机器人, 海洋保护