Clear Sky Science · nl
Achterbank-bestuurdersarchitectuur om potvissen passief te volgen op hun stemmen met een autonome onderwatertrechter
Luisterende robots onder de golven
Stel je voor dat je een van de grootste dieren op aarde volgt, niet door boten na te jagen of apparaten aan hun lichaam te bevestigen, maar door stilletjes mee te drijven en gewoon te luisteren. Deze studie beschrijft een nieuwe manier om potvissen langdurig te volgen met een autonome onderwaterglider die de klikken van de walvissen ‘‘afluistert’’ en zijn koers daar op afstemt. De aanpak belooft zachtere, langduriger waarnemingen die ons begrip van walvisgedrag kunnen verdiepen en kunnen helpen deze opmerkelijke dieren te beschermen.
Waarom het volgen van walvisstemmen telt
Potvissen brengen een groot deel van hun leven ver onder het oceaanoppervlak door, duiken honderden meters diep en communiceren met snelle klikken en gepatterniseerde ‘‘codas’’. Biologen willen deze geluiden koppelen aan specifiek gedrag, familiebanden en bewegingen, maar de meeste huidige instrumenten schieten tekort. Drijvende boeien of scheepsmicrofoons werken alleen terwijl walvissen in de buurt blijven, en zuignap-tags laten na relatief korte tijden los. Daardoor is het moeilijk te bestuderen hoe individuen en groepen zich over dagen tot weken gedragen en communiceren terwijl ze door de open oceaan trekken.
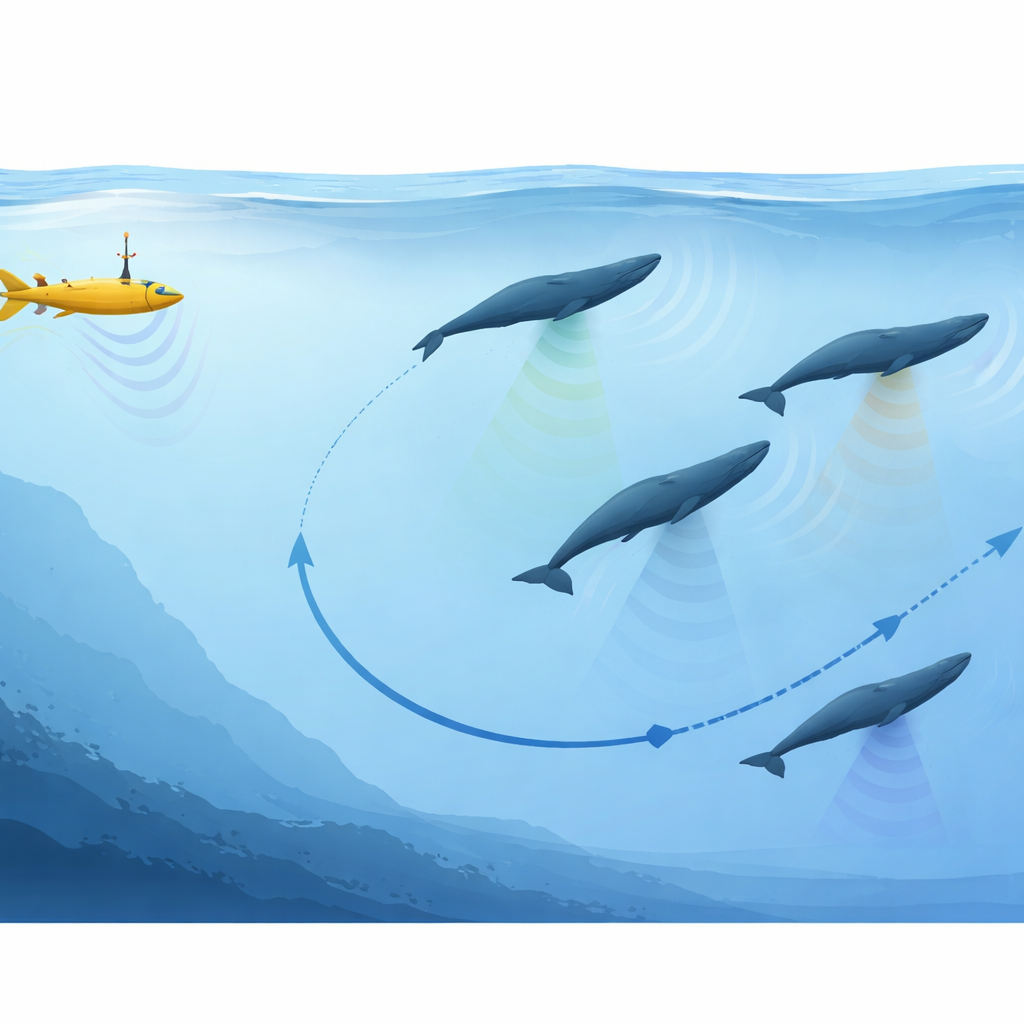
Een stille glider als onderwaterverkenner
De onderzoekers kozen voor een ander soort robot: een onderwaterglider. In tegenstelling tot schroef aangedreven onderzeeërs beweegt een glider zich door zijn drijfvermogen te veranderen en een interne accu te verplaatsen om langzaam in zachte bogen te klimmen of te zakken. Dit ontwerp is extreem energiezuinig en zeer stil, waardoor missies van weken of maanden mogelijk zijn. Op de Project CETI–SeaExplorer-glider monteerde het team een compacte array van vier microfoons in de neus, gerangschikt in een kleine driedimensionale configuratie. Terwijl de glider tussen tientallen en honderden meters duikt en klimt, neemt deze array continu het onderwatergeluid op terwijl de hoofdcomputer van het vaartuig de missie bestuurt.
Een achterbank-brein dat luistert en stuurt
Om van de glider een walvisvolger te maken, voegden de auteurs wat zij een ‘‘achterbank-bestuurder’’ noemen toe — een tweede boordcomputer die naar binnenkomende geluiden luistert en koerswijzigingen kan voorstellen. Deze wetenschappelijke controller draait binnen een robotica-softwarekader en koppelt op alle sensoren van de glider. Eerst detecteert hij de scherpe, breedbandige klikken van potvissen en scheidt die van achtergrondgeluiden zoals knipkreeftjes of golven. Vervolgens schat hij de richting waaruit elke klik komt door kleine tijdsverschillen tussen de vier microfoons te vergelijken. Door klikken in de tijd en naar richting te groeperen, splitst het systeem overlappende klikreeksen in individuele bronnen, en weet het zo meerdere roepende walvissen te scheiden.
Het kiezen van welke walvis te volgen
Zodra de klikken zijn gesorteerd, selecteert de achterbank-bestuurder een ‘‘doel’’walvis, meestal degene met de sterkste of meest frequente klikken, wat doorgaans wijst op het dichtstbijzijnde dier. De controller zet de gemeten peiling van die walvis om in een nieuwe gewenste koers voor de glider en stuurt dit commando naar de hoofd-navigatiecomputer. De glider reageert door langzaam zijn interne accu te draaien zodat hij naar het doel pivoteert terwijl hij zijn duikpatroon voortzet. Om constant zigzaggen te vermijden, pauzeert het luisterproces voor een vooraf ingestelde tijd na elke koersenwijziging, met kortere pauzes wanneer het walvissignaal luid en helder is. Gedurende het hele proces zorgen ingebouwde veiligheidschecks ervoor dat gevraagde dieptes of hoeken binnen de operationele grenzen van de glider blijven.
Het systeem op zee op de proef stellen
Het team voerde twee hoofdproeven uit. In een gecontroleerd experiment voor de zuidkust van Frankrijk hingen ze een onderwaterluidspreker aan een boot en speelden opgenomen potvisklikken af terwijl de glider een reeks duiken uitvoerde. Elke keer dat de glider de klikken hoorde, berekende de achterbank-bestuurder de richting van de boot en gaf een nieuwe koersopdracht. Gelogde gegevens toonden aan dat de glider binnen tientallen seconden op nieuwe commando’s begon te reageren en meestal binnen enkele minuten uitlijnde, met richtingfouten van slechts een paar tot ongeveer vijftien graden. Een tweede inzet bij Dominica testte de volledige luisterketen op echte walvissen. Daar detecteerde de glider tientallen klikken binnen slechts enkele seconden aan data en splitste deze in maximaal zeven verschillende klikbronnen, elk met een stabiele richting, wat aantoont dat hij meerdere walvissen kan onderscheiden in een druk onderwatersgeluidslandschap.
Een nieuw instrument voor walvisverhalen
Dit werk laat zien dat een stille, langzaam bewegende onderwaterglider als een geduldige metgezel voor potvissen kan fungeren en zich uitsluitend laat leiden door de geluiden van de dieren zelf. Hoewel langdurig, continu volgen een doel is voor toekomstige missies, bewijst het gedemonstreerde systeem al dat luisteren aan boord de glider veilig kan sturen en kan ontleden wie van waar klikt. Met verdere verfijning zouden vloten van zulke gliders rijke, langdurige gegevensreeksen kunnen opbouwen die walvisbewegingen, duikpatronen en vocale uitwisselingen koppelen — waarmee wetenschappers helpen de sociale levens en communicatiesystemen van deze reuzen van de diepe oceaan in kaart te brengen, terwijl menselijke verstoring tot een minimum wordt beperkt.
Bronvermelding: Diamant, R., Pewzner, Y., Gubnitsky, G. et al. Backseat driver architecture to passively follow sperm whales by their voices with an autonomous underwater glider. Sci Rep 16, 8738 (2026). https://doi.org/10.1038/s41598-026-43138-y
Trefwoorden: potvissen, onderwaterglider, passieve akoestische monitoring, autonome oceaanrobots, mariene bescherming