Clear Sky Science · de
Backseat-Driver-Architektur, um Pottwale passiv anhand ihrer Stimmen mit einem autonomen Unterwasserglider zu verfolgen
Lauschende Roboter unter der Oberfläche
Stellen Sie sich vor, eines der größten Tiere der Erde nicht durch Verfolgung mit Booten oder durch Anbringen von Sensoren am Körper zu verfolgen, sondern indem man leise mitschwimmt und einfach nur lauscht. Diese Studie beschreibt eine neue Methode, Pottwale über lange Zeiträume zu begleiten, indem ein autonomer Unterwasserglider die Klicklaute der Wale „abhorcht“ und seine Fahrt dementsprechend steuert. Der Ansatz verspricht schonendere, länger andauernde Beobachtungen, die unser Verständnis von Walverhalten vertiefen und zum Schutz dieser bemerkenswerten Tiere beitragen können.
Warum es wichtig ist, Walstimmen zu folgen
Pottwale verbringen große Teile ihres Lebens weit unter der Meeresoberfläche, tauchen hunderte Meter tief und kommunizieren mit schnellen Klickfolgen und strukturierten „Codas“. Biologen möchten diese Laute mit konkretem Verhalten, familiären Bindungen und Wanderbewegungen verknüpfen, doch die meisten derzeitigen Werkzeuge stoßen an Grenzen. Bojen oder schiffbasierte Mikrofone funktionieren nur, solange sich die Wale in der Nähe aufhalten, und Saugnapf-Tag(s) lösen sich nach vergleichsweise kurzer Zeit. Das erschwert es, zu untersuchen, wie sich Individuen und Gruppen über Tage bis Wochen verhalten und austauschen, während sie durch den offenen Ozean ziehen.
Ein stiller Glider als Unterwasserscout
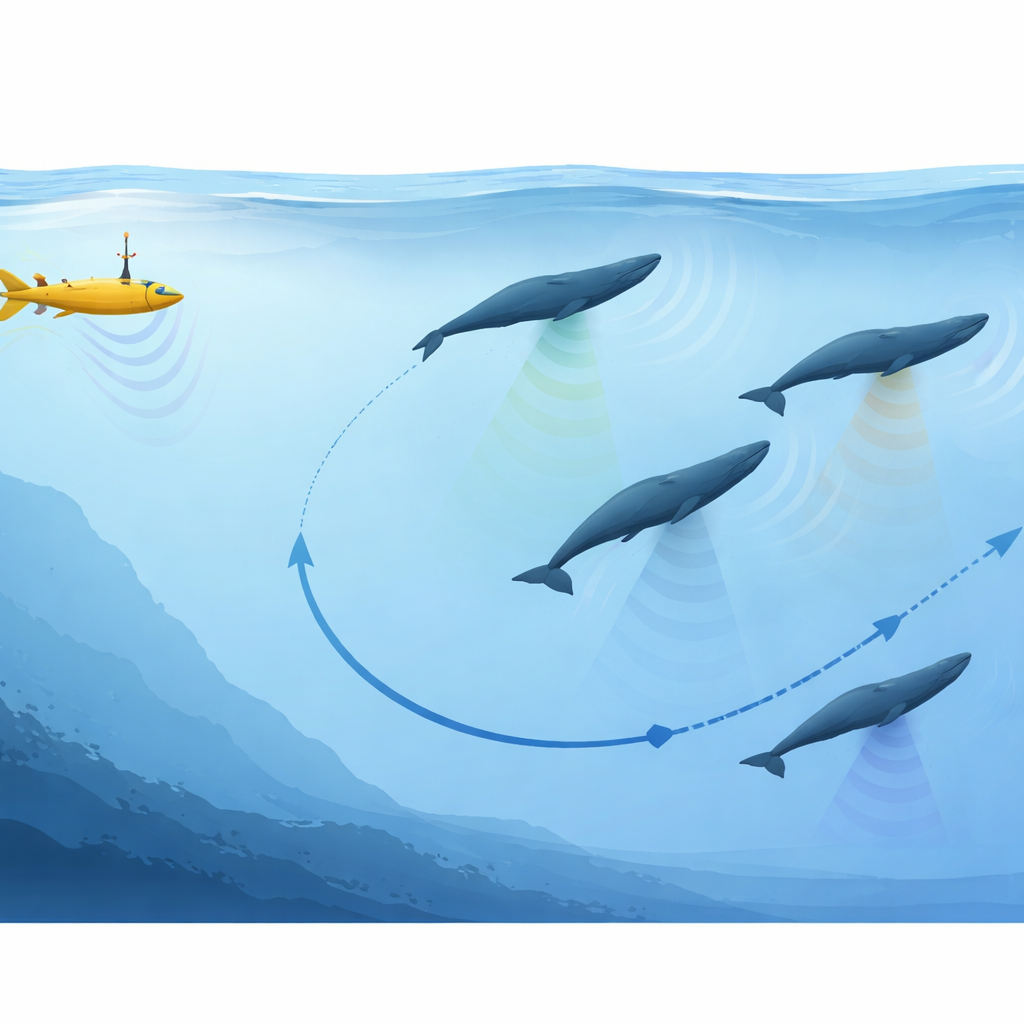
Die Forschenden wandten sich einem anderen Robotertyp zu: dem Unterwasserglider. Im Gegensatz zu schraubengetriebenen U-Booten bewegt sich ein Glider, indem er seine Auftriebseigenschaften verändert und eine interne Batterie verschiebt, um in langsamen, sanften Bögen aufzusteigen oder zu sinken. Dieses Design ist extrem energieeffizient und sehr leise, wodurch Missionen über Wochen oder Monate möglich werden. Auf dem Project CETI–SeaExplorer-Glider montierte das Team ein kompaktes Vier-Mikrofon-Array in der Bugsektion, angeordnet in einem kleinen dreidimensionalen Muster. Während der Glider zwischen einigen zehn und hunderten Metern taucht und steigt, zeichnet dieses Array kontinuierlich die Unterwasser-Klanglandschaft auf, während der Bordcomputer die Mission steuert.
Ein „Backseat“-Gehirn, das zuhört und lenkt
Um den Glider zum Walverfolger zu machen, fügten die Autor:innen einen sogenannten „Backseat Driver“ hinzu — einen zweiten Bordrechner, der die eingehenden Geräusche abhört und Kursänderungen vorschlagen kann. Dieser wissenschaftliche Controller läuft innerhalb eines Robotik-Software-Frameworks und greift auf alle Sensoren des Gliders zu. Zuerst detektiert er die scharfen, breitbandigen Klicks der Pottwale und trennt sie von Hintergrundgeräuschen wie Schnappkrebsen oder Wellen. Dann schätzt er die Richtung, aus der jeder Klick ankommt, indem er winzige Zeitunterschiede zwischen den vier Mikrofonen vergleicht. Durch das Gruppieren von Klicks über die Zeit und nach Richtung kann das System überlappende Klickfolgen in einzelne Quellen aufteilen und so mehrere gleichzeitig rufende Wale auseinanderhalten.
Auswahl des zu verfolgenden Wals
Sobald die Klicks sortiert sind, wählt der Backseat Driver ein „Ziel“ — in der Regel den Wal, dessen Klicks am stärksten oder am häufigsten sind, was meist auf das nächstgelegene Tier hinweist. Der Controller wandelt den gemessenen Peil des Wals in einen neuen gewünschten Kurs für den Glider um und sendet diesen Befehl an die Hauptnavigation. Der Glider reagiert, indem er seine interne Batterie langsam dreht, um sich in Richtung des Ziels zu drehen, während er sein Tauchprofil beibehält. Um ständiges Zickzack zu vermeiden, pausiert der Lauscher nach jeder Richtungsänderung für eine voreingestellte Zeit, mit kürzeren Pausen, wenn die Wal-Signale laut und klar sind. Eingebaute Sicherheitsprüfungen stellen dabei stets sicher, dass angeforderte Tiefen oder Neigungswinkel innerhalb der Einsatzgrenzen des Gliders bleiben.
Systemtests auf See
Das Team führte zwei Hauptversuche durch. In einem kontrollierten Experiment vor Südfrankreich hängten sie einen Unterwasserlautsprecher von einem Boot aus und spielten aufgezeichnete Pottwal-Klicks ab, während der Glider eine Serie von Tauchgängen ausführte. Jedes Mal, wenn der Glider die Klicks hörte, berechnete der Backseat Driver die Richtung des Boots und orderte einen neuen Kurs. Geloggte Daten zeigten, dass der Glider innerhalb von einigen zehn Sekunden auf neue Kommandos zu reagieren begann und sich meist innerhalb weniger Minuten ausrichtete, mit Richtungsfehlern von nur wenigen bis etwa fünfzehn Grad. Eine zweite Einsatzzone vor Dominica testete die gesamte Hör-Pipeline an echten Walen. Dort detektierte der Glider bereits innerhalb weniger Sekunden Dutzende Klicks und separierte sie in bis zu sieben verschiedene Klickquellen, jede mit stabiler Richtung, was demonstriert, dass er mehrere Wale in einer dichten Unterwasser-Klanglandschaft unterscheiden kann.
Ein neues Werkzeug fürs Wal-Erzählen
Diese Arbeit zeigt, dass ein leiser, langsam manövrierender Unterwasserglider als geduldiger Begleiter von Pottwalen dienen kann, der sich ausschließlich an den Lauten der Tiere orientiert. Obwohl langfristiges, kontinuierliches Folgen weiterhin ein Ziel künftiger Einsätze ist, beweist das demonstrierte System bereits, dass onboard abgehörte Signale den Glider sicher lenken und aufklären können, wer von wo klickt. Mit weiterer Verfeinerung könnten Flotten solcher Glider reichhaltige, langdauernde Datensätze erstellen, die Walbewegungen, Tauchmuster und vokale Austausche verknüpfen — und so Wissenschaftlern helfen, das Sozialleben und die Kommunikationssysteme dieser Tiefsee-Riesen zu entschlüsseln, während menschliche Störungen minimiert werden.
Zitation: Diamant, R., Pewzner, Y., Gubnitsky, G. et al. Backseat driver architecture to passively follow sperm whales by their voices with an autonomous underwater glider. Sci Rep 16, 8738 (2026). https://doi.org/10.1038/s41598-026-43138-y
Schlüsselwörter: Pottwale, Unterwasserglider, passive akustische Überwachung, autonome Ozeanroboter, Meeresnaturschutz