Clear Sky Science · pt
Arquitetura de "motorista de banco de trás" para seguir passivamente cachalotes por suas vozes com um planador autônomo subaquático
Robôs que escutam sob as ondas
Imagine rastrear um dos maiores animais da Terra não perseguindo-o com barcos ou prendendo aparelhos ao seu corpo, mas flutuando silenciosamente ao lado e simplesmente escutando. Este estudo descreve uma nova forma de acompanhar cachalotes por longos períodos usando um planador subaquático autônomo que “espiona” os cliques das baleias e ajusta sua rota conforme. A abordagem promete observações mais delicadas e duradouras que podem aprofundar nosso entendimento do comportamento das baleias e ajudar a proteger esses animais notáveis.
Por que seguir as vozes das baleias importa
Cachalotes passam grande parte da vida muito abaixo da superfície do oceano, mergulhando centenas de metros e comunicando-se com cliques rápidos e “codas” padronizadas. Os biólogos querem ligar esses sons a comportamentos específicos, laços familiares e movimentos, mas a maioria das ferramentas atuais não é suficiente. Boias flutuantes ou microfones embarcados em navios só funcionam enquanto as baleias permanecem por perto, e tags de ventosa se soltam após períodos relativamente curtos. Isso dificulta estudar como indivíduos e grupos se comportam e se comunicam por dias ou semanas enquanto viajam pelo oceano aberto.
Um planador silencioso como batedor subaquático
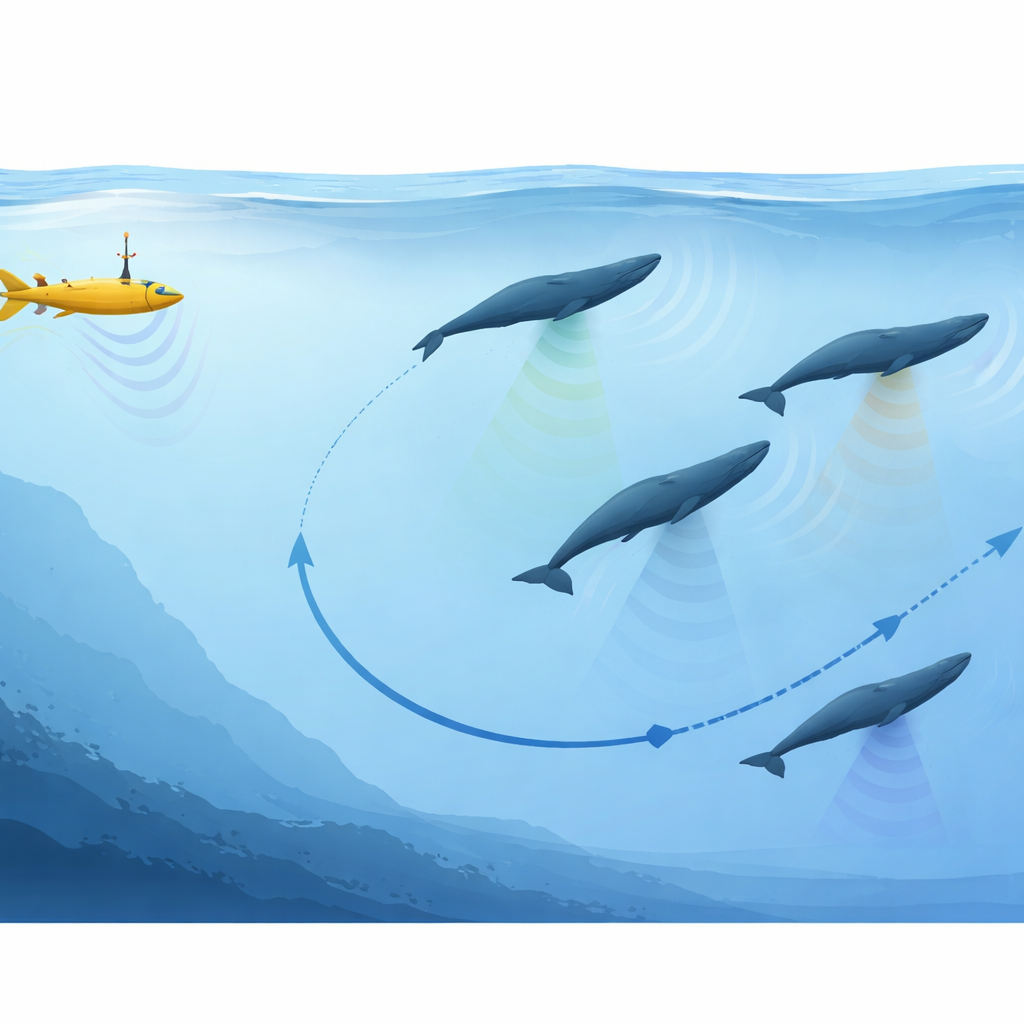
Os pesquisadores recorreram a um tipo diferente de robô: o planador subaquático. Ao contrário de submarinos com hélices, um planador se move mudando sua flutuabilidade e deslocando uma bateria interna para subir ou descer em arcos lentos e suaves. Esse design é extremamente eficiente em termos de energia e muito silencioso, permitindo missões que podem durar semanas ou meses. No planador do Projeto CETI–SeaExplorer, a equipe montou um conjunto compacto de quatro microfones no nariz, dispostos em um pequeno arranjo tridimensional. À medida que o planador mergulha e sobe entre dezenas e centenas de metros, esse arranjo grava continuamente a paisagem sonora subaquática enquanto o computador principal do veículo pilota a missão.
Um cérebro de banco de trás que escuta e guia
Para transformar o planador em um seguidor de baleias, os autores adicionaram o que chamam de “motorista de banco de trás” — um segundo computador a bordo que escuta os sons recebidos e pode sugerir mudanças de curso. Esse controlador científico roda dentro de uma estrutura de software de robótica e acessa todos os sensores do planador. Primeiro, ele detecta os cliques agudos e de banda larga produzidos pelos cachalotes, separando-os de ruídos de fundo como camarões estalo ou ondas. Em seguida, estima a direção de onde cada clique chega comparando diferenças de tempo mínimas entre os quatro microfones. Agrupando cliques ao longo do tempo e por direção, o sistema separa trens de cliques sobrepostos em fontes individuais, efetivamente distinguindo várias baleias chamando ao mesmo tempo.
Escolhendo qual baleia seguir
Uma vez que os cliques são classificados, o motorista de banco de trás seleciona uma “baleia alvo”, tipicamente aquela cujos cliques são mais fortes ou mais frequentes, o que geralmente indica o animal mais próximo. O controlador converte a direção medida dessa baleia em um novo rumo desejado para o planador e envia esse comando ao computador de navegação principal. O planador responde girando lentamente sua bateria interna para se orientar na direção do alvo enquanto mantém seu padrão de mergulho. Para evitar ziguezagues constantes, o processo de escuta pausa por um tempo predefinido após cada mudança de rumo, com pausas mais curtas quando os sinais da baleia são altos e claros. Ao longo de toda a operação, verificações de segurança incorporadas garantem que qualquer profundidade ou ângulo solicitado permaneça dentro dos limites operacionais do planador.
Colocando o sistema à prova no mar
A equipe conduziu dois testes principais. Em um experimento controlado ao largo do sul da França, eles suspenderam um alto-falante subaquático de um barco e reproduziram gravações de cliques de cachalote enquanto o planador executava uma série de mergulhos. Cada vez que o planador ouvia os cliques, o motorista de banco de trás calculava a direção do barco e ordenava um novo rumo. Os dados registrados mostraram que o planador começava a responder aos novos comandos dentro de dezenas de segundos e geralmente alinhava-se em poucos minutos, com erros direcionais de apenas alguns até cerca de quinze graus. Um segundo desdobramento ao largo da Dominica testou todo o sistema de escuta com baleias reais. Lá, o planador detectou dezenas de cliques em apenas alguns segundos de dados e os separou em até sete fontes distintas de cliques, cada uma com direção estável, demonstrando que pode distinguir várias baleias em um cenário sonoro subaquático movimentado.
Uma nova ferramenta para contar histórias sobre baleias
Este trabalho mostra que um planador subaquático silencioso e de movimento lento pode agir como um companheiro paciente dos cachalotes, orientando-se exclusivamente com base nos próprios sons dos animais. Embora o acompanhamento contínuo e de longo prazo permaneça uma meta para missões futuras, o sistema demonstrado já prova que a escuta a bordo pode guiar o planador com segurança e desvendar quem está clicando e de onde. Com refinamentos adicionais, frotas de tais planadores poderiam construir registros ricos e de longa duração conectando movimentos das baleias, padrões de mergulho e trocas vocais — ajudando cientistas a montar a vida social e os sistemas de comunicação desses gigantes do oceano profundo enquanto mantêm a perturbação humana ao mínimo.
Citação: Diamant, R., Pewzner, Y., Gubnitsky, G. et al. Backseat driver architecture to passively follow sperm whales by their voices with an autonomous underwater glider. Sci Rep 16, 8738 (2026). https://doi.org/10.1038/s41598-026-43138-y
Palavras-chave: cachalotes, planador subaquático, monitoramento acústico passivo, robôs oceânicos autônomos, conservação marinha