Clear Sky Science · it
Architettura “backseat driver” per seguire passivamente i capodogli dai loro vocalizzi con un planatore sottomarino autonomo
Robot che ascoltano sotto le onde
Immaginate di tracciare uno dei più grandi animali della Terra non inseguendolo con barche o attaccando dispositivi al suo corpo, ma scivolando silenziosamente al suo fianco e semplicemente ascoltando. Questo studio descrive un nuovo modo di seguire i capodogli per lunghi periodi usando un planatore sottomarino autonomo che “origlia” i click delle balene e si dirige di conseguenza. L’approccio promette osservazioni più delicate e durature che possono approfondire la nostra comprensione del comportamento dei cetacei e contribuire a proteggere questi animali straordinari.
Perché è importante seguire le voci delle balene
I capodogli trascorrono gran parte della loro vita ben al di sotto della superficie, tuffandosi a centinaia di metri e comunicando con click rapidissimi e “codi” ritmati. I biologi vogliono collegare questi suoni a comportamenti specifici, legami familiari e spostamenti, ma la maggior parte degli strumenti attuali è insufficiente. Boe galleggianti o microfoni imbarcati funzionano solo quando le balene sono nelle vicinanze, e i tag a ventosa si staccano dopo periodi relativamente brevi. Questo rende difficile studiare come individui e gruppi si comportano e comunicano per giorni o settimane mentre percorrono l’oceano aperto.
Un planatore silenzioso come esploratore subacqueo
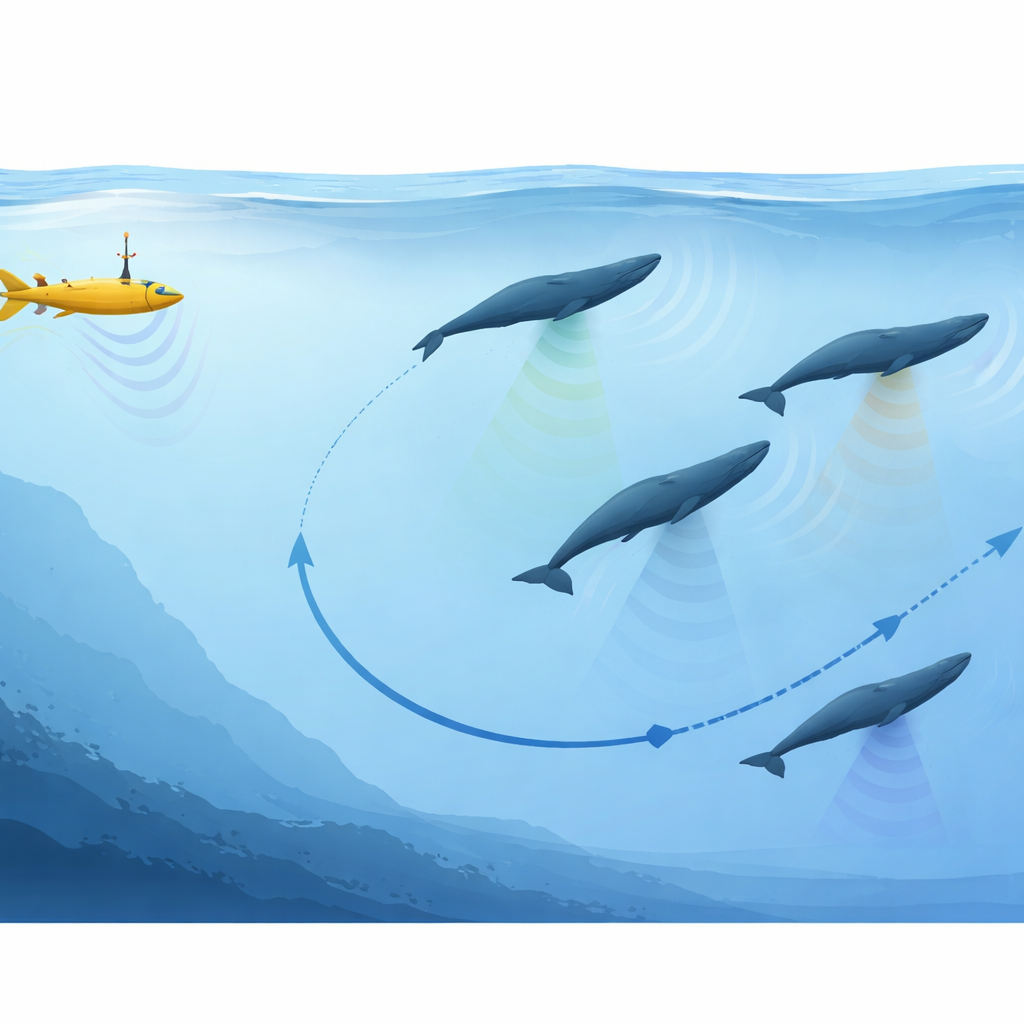
I ricercatori si sono rivolti a un tipo diverso di robot: il planatore sottomarino. A differenza dei sottomarini a elica, un planatore si muove variando la spinta di galleggiamento e spostando una batteria interna per salire o scendere in archi lenti e morbidi. Questo progetto è estremamente efficiente dal punto di vista energetico e molto silenzioso, consentendo missioni della durata di settimane o mesi. Sul planatore del Project CETI–SeaExplorer, il team ha montato al muso un compatto array di quattro microfoni disposti in un piccolo schema tridimensionale. Mentre il planatore scende e risale fra decine e centinaia di metri, questo array registra continuamente il paesaggio sonoro subacqueo mentre il computer di bordo pilota la missione.
Un cervello “backseat” che ascolta e guida
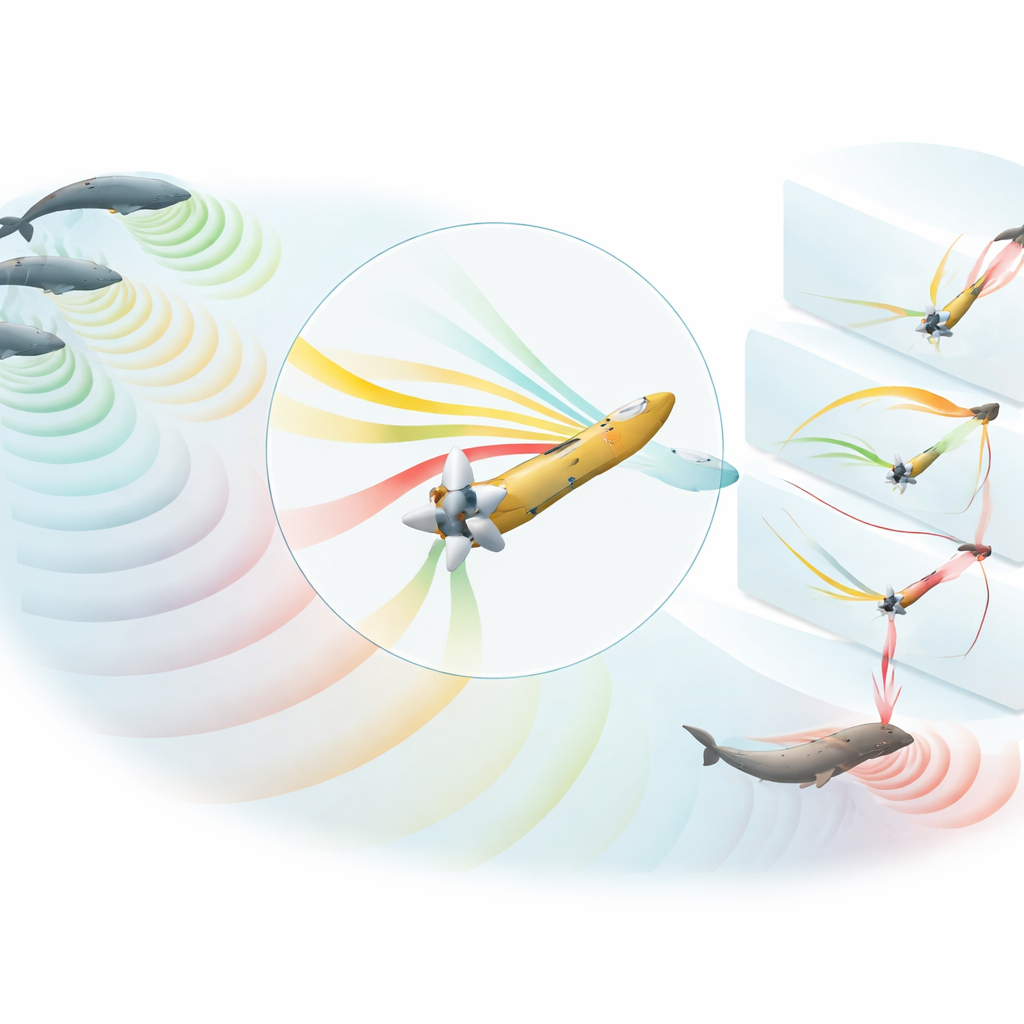
Per trasformare il planatore in un inseguitore di balene, gli autori hanno aggiunto ciò che chiamano un “backseat driver” — un secondo computer di bordo che ascolta i suoni in ingresso e può suggerire cambi di rotta. Questo controllore scientifico gira all’interno di un framework software per la robotica e sfrutta tutti i sensori del planatore. Prima individua i click netti e a banda larga prodotti dai capodogli, separandoli dai rumori di fondo come i gamberetti che scattano o il moto ondoso. Poi stima la direzione da cui arriva ciascun click confrontando minime differenze temporali tra i quattro microfoni. Raggruppando i click nel tempo e per direzione, il sistema separa treni di click sovrapposti in sorgenti individuali, ottenendo in pratica di distinguere più balene che chiamano contemporaneamente.
Scegliere quale balena seguire
Una volta che i click sono stati ordinati, il backseat driver seleziona una “balena bersaglio”, tipicamente quella i cui click sono più forti o più frequenti, il che di solito indica l’animale più vicino. Il controllore converte la direzione misurata della balena in una nuova rotta desiderata per il planatore e invia questo comando al computer di navigazione principale. Il planatore risponde ruotando lentamente la batteria interna per puntare verso il bersaglio continuando il suo profilo di immersione. Per evitare continui zig‑zag, il processo di ascolto si mette in pausa per un tempo prestabilito dopo ogni cambio di rotta, con pause più brevi quando i segnali della balena sono forti e chiari. In ogni momento, controlli di sicurezza integrati assicurano che qualsiasi profondità o angolo richiesto rimanga entro i limiti operativi del planatore.
Mettere il sistema alla prova in mare
Il team ha condotto due prove principali. In un esperimento controllato al largo del sud della Francia, hanno sospeso un altoparlante sottomarino da una imbarcazione e hanno riprodotto registrazioni di click di capodoglio mentre il planatore eseguiva una serie di immersioni. Ogni volta che il planatore rilevava i click, il backseat driver calcolava la direzione della barca e ordinava una nuova rotta. I dati di log hanno mostrato che il planatore iniziava a rispondere ai nuovi comandi entro decine di secondi e di solito si allineava entro pochi minuti, con errori di direzione di appena poche fino a circa quindici gradi. Una seconda missione al largo di Dominica ha testato l’intera catena di ascolto con capodogli reali. Lì il planatore ha rilevato dozzine di click in pochi secondi di dati e li ha separati in fino a sette sorgenti di click distinte, ciascuna con una direzione stabile, dimostrando di poter distinguere più balene in un paesaggio sonoro sottomarino affollato.
Un nuovo strumento per narrare le storie delle balene
Questo lavoro dimostra che un planatore sottomarino lento e silenzioso può agire come un compagno paziente per i capodogli, dirigendosi basandosi esclusivamente sui suoni prodotti dagli animali. Sebbene il seguimento continuo e a lungo termine resti un obiettivo per missioni future, il sistema dimostrato prova già che l’ascolto di bordo può guidare in sicurezza il planatore e districare chi sta clickando e da dove. Con ulteriori perfezionamenti, flotte di tali planatori potrebbero costruire ricche registrazioni di lunga durata che collegano spostamenti, profili di immersione e scambi vocali delle balene — aiutando gli scienziati a ricomporre la vita sociale e i sistemi di comunicazione di questi giganti degli abissi mantenendo al minimo il disturbo umano.
Citazione: Diamant, R., Pewzner, Y., Gubnitsky, G. et al. Backseat driver architecture to passively follow sperm whales by their voices with an autonomous underwater glider. Sci Rep 16, 8738 (2026). https://doi.org/10.1038/s41598-026-43138-y
Parole chiave: capodogli, planatore sottomarino, monitoraggio acustico passivo, robot oceanici autonomi, conservazione marina