Clear Sky Science · pl
Architektura „kierowcy na tylnym siedzeniu” do pasywnego śledzenia kaszalotów po ich głosach za pomocą autonomicznego ślizgacza podwodnego
Nasłuchujące roboty pod falami
Wyobraź sobie śledzenie jednego z największych zwierząt na Ziemi nie poprzez pościg łodziami ani przyczepianie urządzeń do jego ciała, lecz poprzez ciche dryfowanie obok i po prostu słuchanie. W tym badaniu opisano nowy sposób podążania za kaszalotami przez długie okresy z użyciem autonomicznego ślizgacza podwodnego, który „podsłuchuje” kliknięcia wielorybów i odpowiednio koryguje kurs. Metoda ta obiecuje delikatniejsze, dłużej trwające obserwacje, które mogą pogłębić nasze rozumienie zachowań wielorybów i pomóc chronić te wyjątkowe zwierzęta.
Dlaczego ważne jest śledzenie głosów wielorybów
Kaszaloty spędzają dużą część życia daleko pod powierzchnią oceanu, nurkując na setki metrów i komunikując się szybkopalnymi kliknięciami oraz wzorowanymi „kodami” (codas). Biolodzy chcą powiązać te dźwięki z konkretnymi zachowaniami, więziami rodzinnymi i przemieszczaniem się, lecz większość obecnych narzędzi nie wystarcza. Pływające boje czy mikrofony na statkach działają tylko wtedy, gdy wieloryby pozostają w pobliżu, a tagi na przyssawkach odłączają się po stosunkowo krótkim czasie. Utrudnia to badanie, jak osobniki i grupy zachowują się i komunikują przez dni czy tygodnie podczas podróży przez otwarty ocean.
Cichy ślizgacz jako podwodny zwiadowca
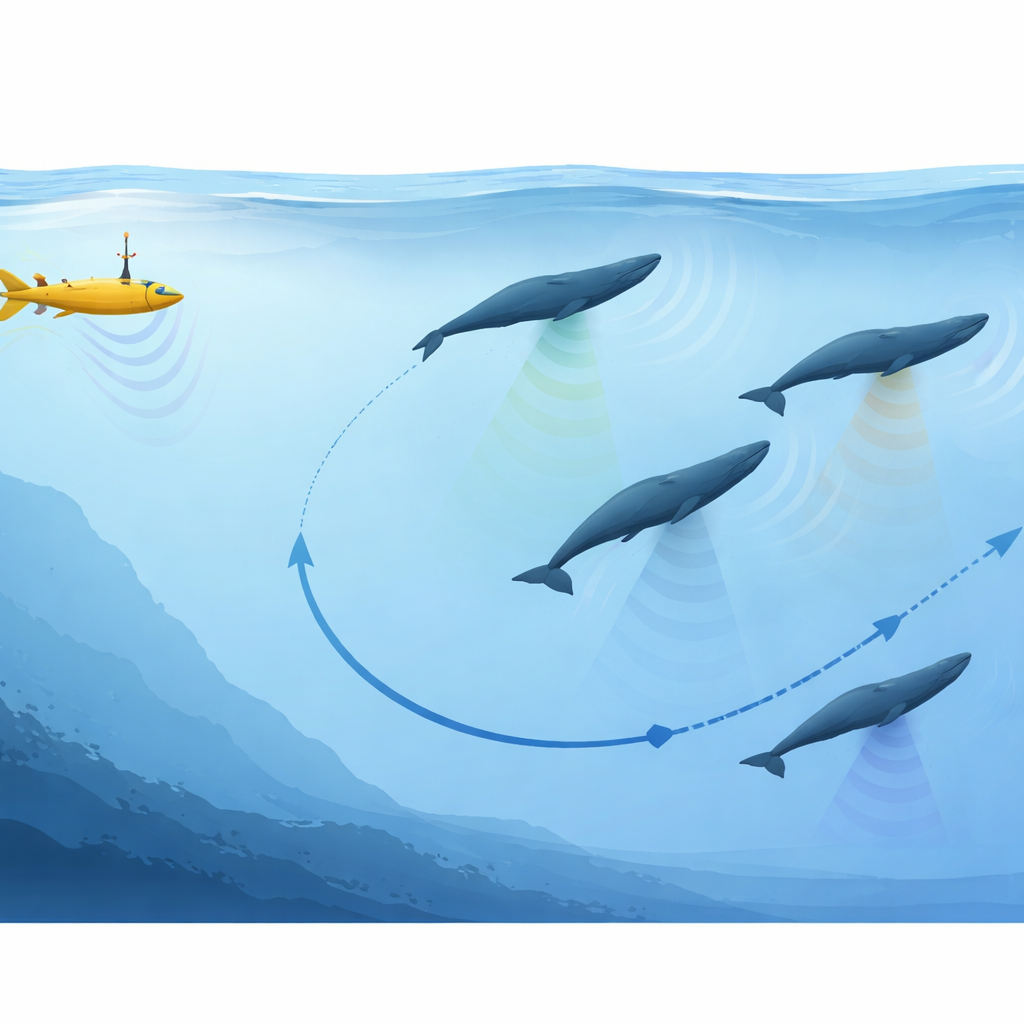
Naukowcy zwrócili się ku innego rodzaju robotowi: ślizgaczowi podwodnemu. W przeciwieństwie do okrętów napędzanych śrubą, ślizgacz porusza się przez zmianę wyporności i przesuwanie wewnętrznej baterii, wspinając się lub opadając w powolnych, łagodnych łukach. Ta konstrukcja jest niezwykle energooszczędna i bardzo cicha, co pozwala na misje trwające tygodnie lub miesiące. Na ślizgaczu Project CETI–SeaExplorer zespół zamontował kompaktową czteromikrofonową tablicę na dziobie, ułożoną w mały trójwymiarowy układ. Gdy ślizgacz nurkuje i wynurza się między dziesiątkami a setkami metrów, ta tablica nieustannie rejestruje podwodny pejzaż dźwiękowy, podczas gdy główny komputer pojazdu pilotuje misję.
Mózg na tylnym siedzeniu, który słucha i kieruje
Aby przemienić ślizgacz w podążacza za wielorybami, autorzy dodali to, co nazywają „kierowcą na tylnym siedzeniu” — drugi pokładowy komputer, który nasłuchuje napływających dźwięków i może sugerować zmiany kursu. Ten naukowy kontroler działa w ramach oprogramowania robotycznego i korzysta ze wszystkich czujników ślizgacza. Najpierw wykrywa ostre, szerokopasmowe kliknięcia produkowane przez kaszaloty, oddzielając je od hałasów tła, takich jak krewetki pstrągające czy fale. Następnie ocenia kierunek, z którego dociera każde kliknięcie, porównując drobne różnice czasowe między czterema mikrofonami. Grupując kliknięcia w czasie i według kierunku, system rozdziela nachodzące na siebie serie kliknięć na indywidualne źródła, skutecznie rozplatając przypadku, gdy wiele wielorybów woła jednocześnie.
Wybór, którego wieloryba śledzić
Gdy kliknięcia zostaną posortowane, kierowca na tylnym siedzeniu wybiera „celowego” wieloryba, zwykle tego, którego kliknięcia są najsilniejsze lub najczęstsze, co zazwyczaj wskazuje na najbliższe zwierzę. Kontroler przekształca zmierzone względem niego azymuty w nowy pożądany kurs dla ślizgacza i wysyła to polecenie do głównego komputera nawigacyjnego. Ślizgacz reaguje, powoli obracając wewnętrzną baterię, aby skręcić w stronę celu, jednocześnie kontynuując swój wzorzec nurkowania. Aby uniknąć ciągłego zygzakowania, proces nasłuchu wstrzymuje się na ustawiony czas po każdej zmianie kursu, z krótszymi przerwami, gdy sygnały wieloryba są głośne i wyraźne. Przez cały czas wbudowane kontrole bezpieczeństwa zapewniają, że każde żądane zanurzenie czy kąt pozostają w granicach operacyjnych ślizgacza.
Testowanie systemu na morzu
Zespół przeprowadził dwa główne testy. W kontrolowanym eksperymencie u wybrzeży południowej Francji zawiesili podwodny głośnik z łodzi i odtwarzali nagrane kliknięcia kaszalotów, podczas gdy ślizgacz wykonywał serię zanurzeń. Za każdym razem, gdy ślizgacz usłyszał kliknięcia, kierowca na tylnym siedzeniu obliczał kierunek łodzi i wydawał nowe polecenie kursu. Zalogowane dane pokazały, że ślizgacz zaczynał reagować na nowe komendy w ciągu kilkudziesięciu sekund i zwykle ustawiał się w ciągu kilku minut, z błędami kierunkowymi wynoszącymi tylko kilka do około piętnastu stopni. Druga wyprawa u wybrzeży Dominiki przetestowała pełen proces nasłuchu na prawdziwych wielorybach. Tam ślizgacz wykrył dziesiątki kliknięć w zaledwie kilka sekund danych i rozdzielił je na nawet siedem odrębnych źródeł klików, z każdym o stabilnym kierunku, demonstrując, że potrafi rozróżnić wiele wielorybów w zatłoczonym podwodnym pejzażu dźwiękowym.
Nowe narzędzie do opowiadania historii wielorybów
Praca ta pokazuje, że cichy, powoli poruszający się ślizgacz podwodny może pełnić rolę cierpliwego towarzysza kaszalotów, sterując się wyłącznie na podstawie dźwięków wydawanych przez zwierzęta. Chociaż długotrwałe, ciągłe śledzenie pozostaje celem przyszłych misji, zaprezentowany system już udowadnia, że nasłuch na pokładzie może bezpiecznie kierować ślizgaczem i rozdzielać, kto kliknięcia generuje oraz z jakiego kierunku. Po dalszym udoskonaleniu, floty takich ślizgaczy mogłyby tworzyć bogate, długotrwałe zapisy łączące ruchy wielorybów, wzorce nurkowania i wymianę wokalną — pomagając naukowcom odtwarzać życie społeczne i systemy komunikacyjne tych gigantów głębin przy minimalnym zakłóceniu ze strony ludzi.
Cytowanie: Diamant, R., Pewzner, Y., Gubnitsky, G. et al. Backseat driver architecture to passively follow sperm whales by their voices with an autonomous underwater glider. Sci Rep 16, 8738 (2026). https://doi.org/10.1038/s41598-026-43138-y
Słowa kluczowe: kaszaloty, ślizgacz podwodny, pasywny monitoring akustyczny, autonomiczne roboty oceaniczne, ochrona środowiska morskiego