Clear Sky Science · es
Arquitectura de «conductor de asiento trasero» para seguir pasivamente a cachalotes por sus voces con un planeador submarino autónomo
Robots oyentes bajo las olas
Imagínese rastrear a uno de los animales más grandes de la Tierra no persiguiéndolo en barcos ni colocándole dispositivos en el cuerpo, sino deslizándose silenciosamente a su lado y simplemente escuchando. Este estudio describe una nueva manera de seguir a cachalotes durante largos periodos usando un planeador submarino autónomo que «oye» los clicks de las ballenas y se orienta en consecuencia. El enfoque promete observaciones más suaves y de mayor duración que pueden profundizar nuestra comprensión del comportamiento de las ballenas y ayudar a proteger a estos animales notables.
Por qué importa seguir las voces de las ballenas
Los cachalotes pasan gran parte de su vida lejos de la superficie del océano, buceando a cientos de metros y comunicándose con clicks de alta velocidad y «codas» con patrones. Los biólogos quieren vincular estos sonidos con comportamientos, lazos familiares y movimientos concretos, pero la mayoría de las herramientas actuales se quedan cortas. Boyas flotantes o micrófonos a bordo de barcos solo funcionan mientras las ballenas estén cerca, y las etiquetas de ventosa se desprenden tras períodos relativamente cortos. Eso dificulta estudiar cómo se comportan y se comunican individuos y grupos durante días o semanas mientras viajan por mar abierto.
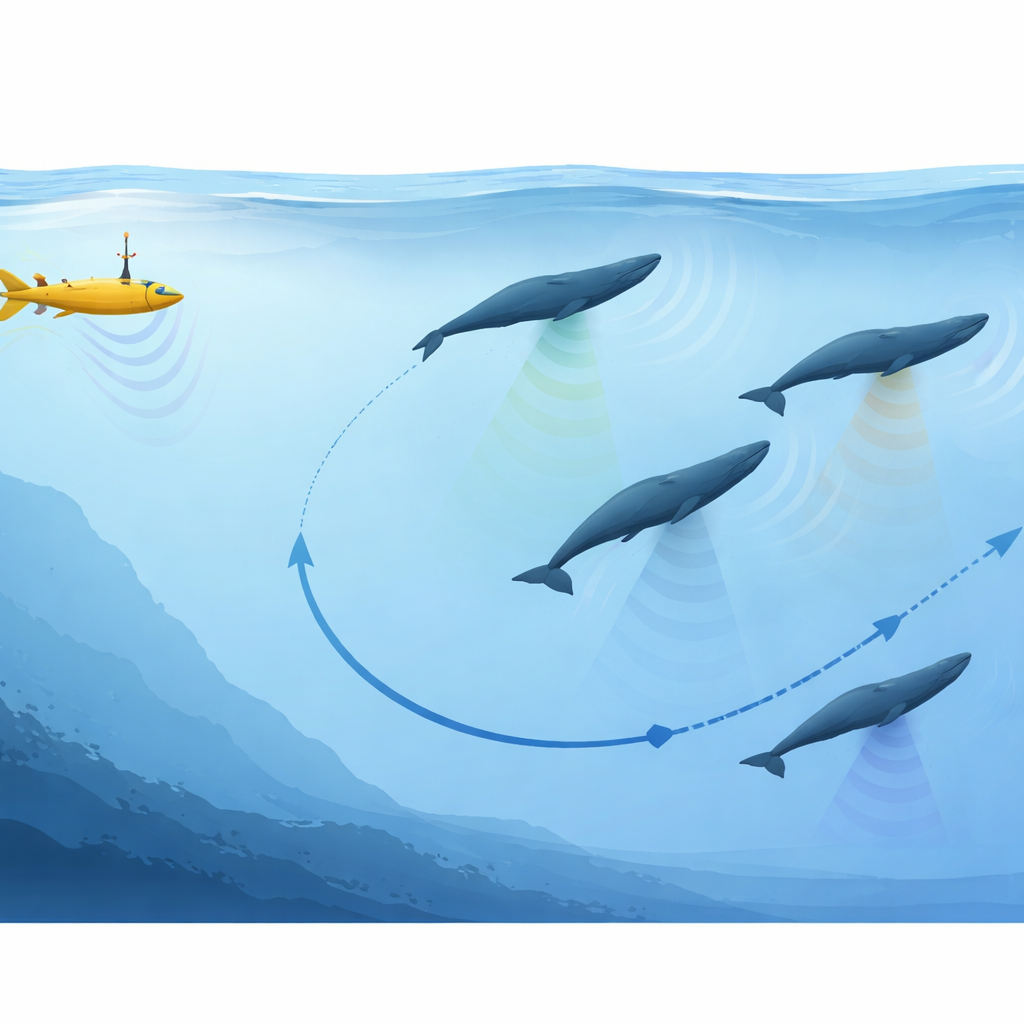
Un planeador silencioso como explorador submarino
Los investigadores recurrieron a otro tipo de robot: un planeador submarino. A diferencia de los submarinos con hélice, un planeador se mueve cambiando su flotabilidad y desplazando una batería interna para ascender o descender en arcos lentos y suaves. Este diseño es extremadamente eficiente en energía y muy silencioso, lo que permite misiones de semanas o meses. En el planeador Project CETI–SeaExplorer, el equipo montó un compacto arreglo de cuatro micrófonos en la proa, dispuesto en un pequeño patrón tridimensional. Mientras el planeador se sumerge y asciende entre decenas y cientos de metros, este arreglo graba de forma continua el paisaje sonoro submarino mientras el ordenador principal del vehículo pilota la misión.
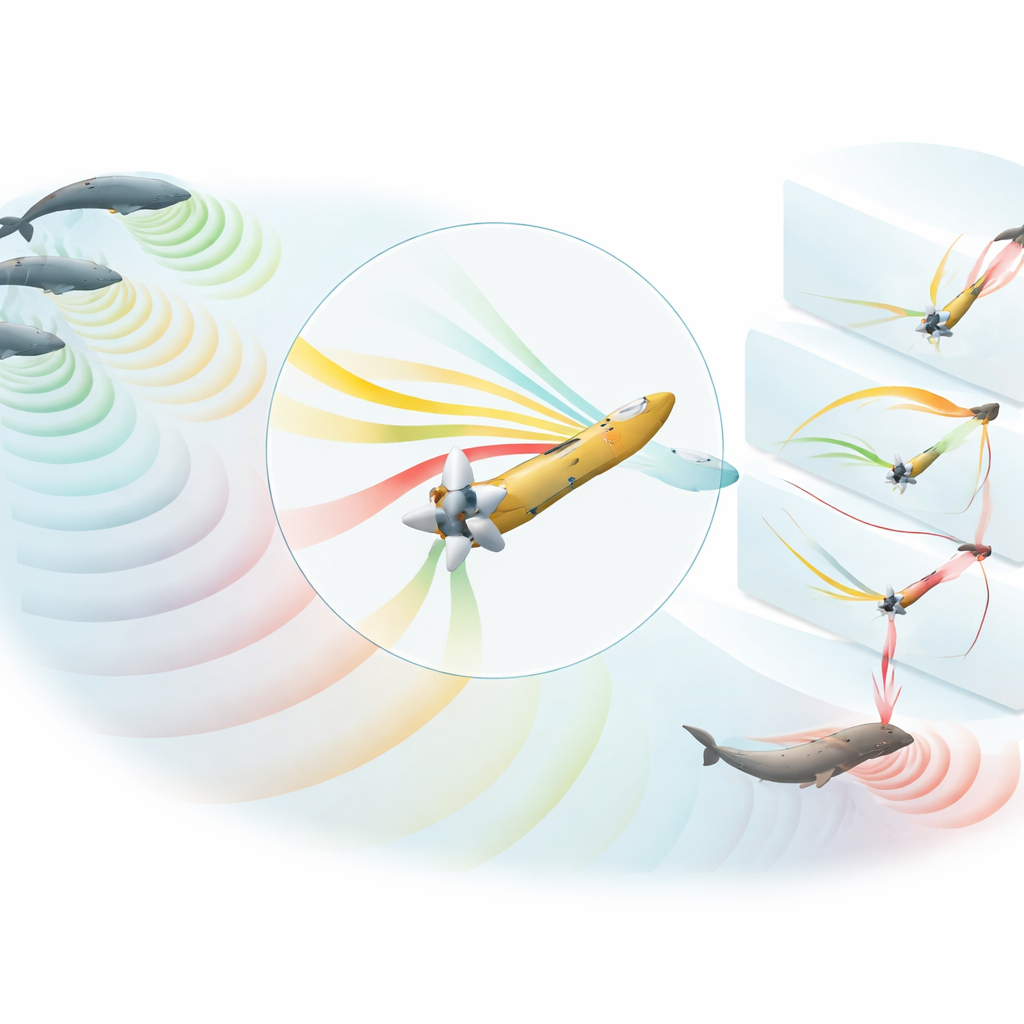
Un cerebro de «conductor de asiento trasero» que escucha y dirige
Para convertir el planeador en un seguidor de ballenas, los autores añadieron lo que llaman un «conductor de asiento trasero»: un segundo ordenador a bordo que escucha los sonidos entrantes y puede sugerir cambios de rumbo. Este controlador científico se ejecuta dentro de un marco de software robótico y accede a todos los sensores del planeador. Primero detecta los clicks agudos y de banda ancha producidos por cachalotes, separándolos de ruidos de fondo como los camarones chasqueadores o las olas. Luego estima la dirección desde la que llega cada click comparando minúsculas diferencias temporales entre los cuatro micrófonos. Agrupando clicks a lo largo del tiempo y por dirección, el sistema separa secuencias de clicks solapadas en fuentes individuales, desenredando eficazmente múltiples ballenas que llaman al mismo tiempo.
Elegir a qué ballena seguir
Una vez que los clicks están ordenados, el conductor de asiento trasero selecciona una «ballena objetivo», normalmente la cuyos clicks son más fuertes o más frecuentes, lo que suele indicar el animal más cercano. El controlador convierte la orientación medida de esa ballena en un nuevo rumbo deseado para el planeador y envía ese comando al ordenador de navegación principal. El planeador responde girando lentamente su batería interna para orientarse hacia el objetivo mientras continúa su patrón de inmersión. Para evitar zigzagueos constantes, el proceso de escucha se pausa durante un tiempo preestablecido después de cada cambio de rumbo, con pausas más cortas cuando las señales de la ballena son fuertes y claras. En todo momento, comprobaciones de seguridad integradas aseguran que cualquier profundidad o ángulo solicitado se mantenga dentro de los límites operativos del planeador.
Poner el sistema a prueba en el mar
El equipo realizó dos ensayos principales. En un experimento controlado frente al sur de Francia, colgaron un altavoz submarino desde un barco y reprodujeron clicks grabados de cachalote mientras el planeador ejecutaba una serie de inmersiones. Cada vez que el planeador oía los clicks, el conductor de asiento trasero calculaba la dirección del barco y ordenaba un nuevo rumbo. Los datos registrados mostraron que el planeador empezaba a responder a los nuevos comandos en decenas de segundos y normalmente se alineaba en pocos minutos, con errores direccionales de solo unos pocos hasta unos quince grados. Un segundo despliegue frente a Dominica probó toda la cadena de escucha con ballenas reales. Allí, el planeador detectó docenas de clicks en apenas unos segundos de datos y los separó en hasta siete fuentes de clicks distintas, cada una con una dirección estable, demostrando que puede distinguir múltiples ballenas en un paisaje sonoro submarino concurrido.
Una nueva herramienta para contar historias de ballenas
Este trabajo muestra que un planeador submarino lento y silencioso puede actuar como un compañero paciente de los cachalotes, orientándose únicamente en función de los propios sonidos de los animales. Aunque el seguimiento continuo a largo plazo sigue siendo un objetivo para misiones futuras, el sistema demostrado ya prueba que la escucha a bordo puede guiar con seguridad al planeador y desenmarañar quién está emitiendo clicks y desde dónde. Con mayor refinamiento, flotas de tales planeadores podrían construir registros ricos y de larga duración que vinculen movimientos de ballenas, patrones de inmersión e intercambios vocales —ayudando a los científicos a recomponer las vidas sociales y los sistemas de comunicación de estos gigantes del océano profundo mientras se minimiza la perturbación humana.
Cita: Diamant, R., Pewzner, Y., Gubnitsky, G. et al. Backseat driver architecture to passively follow sperm whales by their voices with an autonomous underwater glider. Sci Rep 16, 8738 (2026). https://doi.org/10.1038/s41598-026-43138-y
Palabras clave: cachalotes, planeador submarino, monitoreo acústico pasivo, robots oceánicos autónomos, conservación marina