Clear Sky Science · en
Backseat driver architecture to passively follow sperm whales by their voices with an autonomous underwater glider
Listening Robots Beneath the Waves
Imagine tracking one of the largest animals on Earth not by chasing it with boats or attaching gadgets to its body, but by quietly drifting alongside and simply listening. This study describes a new way to shadow sperm whales over long periods using an autonomous underwater glider that “eavesdrops” on the whales’ clicks and steers itself accordingly. The approach promises gentler, longer-lasting observations that can deepen our understanding of whale behavior and help protect these remarkable animals.
Why Following Whale Voices Matters
Sperm whales live much of their lives far below the ocean surface, diving hundreds of meters deep and communicating with rapid-fire clicks and patterned “codas.” Biologists want to link these sounds to specific behaviors, family ties, and movements, but most current tools fall short. Floating buoys or ship-based microphones only work while whales stay nearby, and suction-cup tags detach after relatively short times. That makes it hard to study how individuals and groups behave and communicate over days to weeks as they travel through the open ocean.
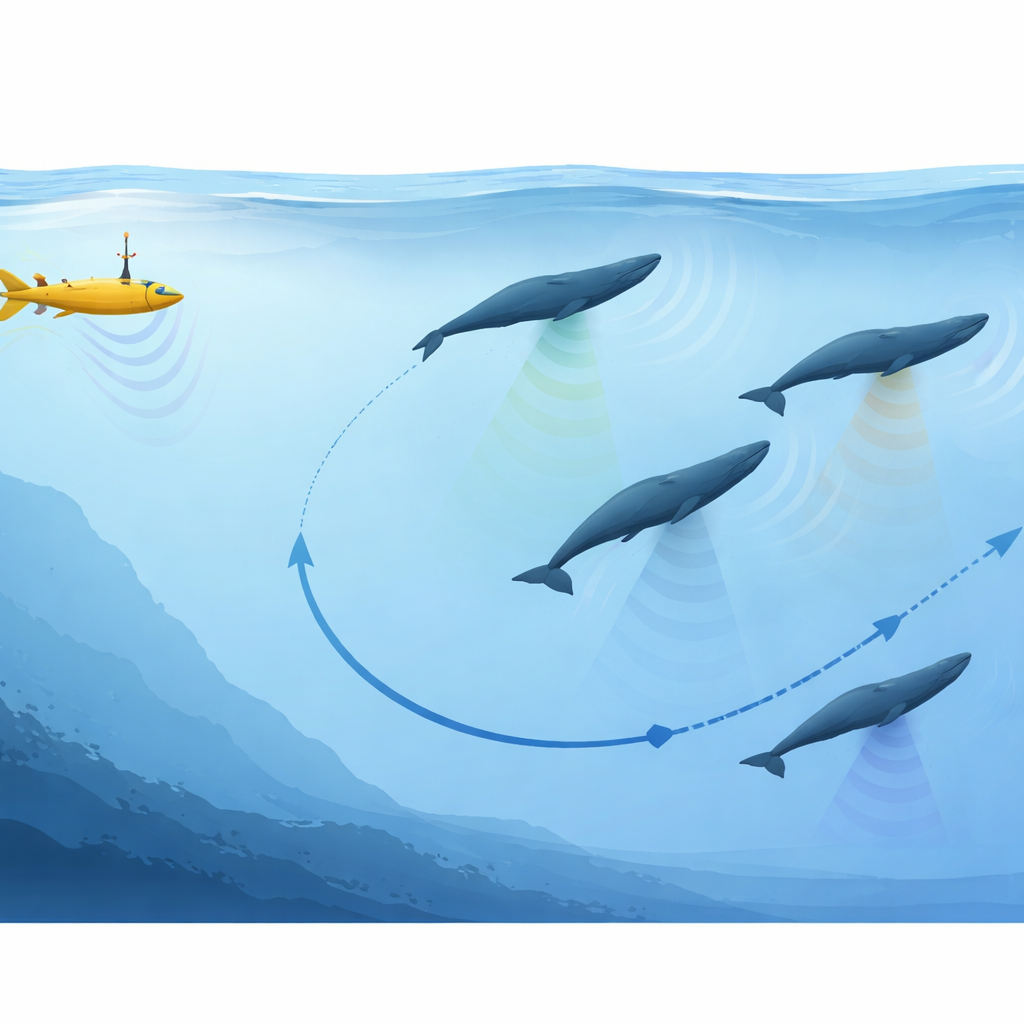
A Silent Glider as an Underwater Scout
The researchers turned to a different kind of robot: an underwater glider. Unlike propeller-driven submarines, a glider moves by changing its buoyancy and shifting an internal battery to climb or sink in slow, gentle arcs. This design is extremely energy efficient and very quiet, allowing missions that can last weeks or months. On the Project CETI–SeaExplorer glider, the team mounted a compact four-microphone array at the nose, arranged in a small three‑dimensional pattern. As the glider dives and climbs between tens and hundreds of meters, this array continuously records the underwater soundscape while the vehicle’s main computer pilots the mission.
A Backseat Brain That Listens and Steers
To turn the glider into a whale follower, the authors added what they call a “backseat driver” — a second onboard computer that listens to the incoming sounds and can suggest course changes. This scientific controller runs within a robotics software framework and taps into all of the glider’s sensors. First, it detects the sharp, broadband clicks produced by sperm whales, separating them from background noises such as snapping shrimp or waves. Then it estimates the direction each click arrives from by comparing tiny timing differences between the four microphones. By grouping clicks over time and by direction, the system separates overlapping click trains into individual sources, effectively teasing apart multiple whales calling at once.
Choosing Which Whale to Follow
Once the clicks are sorted, the backseat driver selects a “target” whale, typically the one whose clicks are strongest or most frequent, which usually indicates the closest animal. The controller converts the measured bearing of that whale into a new desired heading for the glider and sends this command to the main navigation computer. The glider responds by slowly rotating its internal battery to pivot toward the target while continuing its dive pattern. To avoid constant zig‑zagging, the listening process pauses for a preset time after each heading change, with shorter pauses when the whale’s signals are loud and clear. All along, built‑in safety checks ensure that any requested depth or angle stays within the glider’s operational limits.
Putting the System to the Test at Sea
The team conducted two main trials. In a controlled experiment off southern France, they suspended an underwater loudspeaker from a boat and played back recorded sperm whale clicks while the glider executed a series of dives. Each time the glider heard the clicks, the backseat driver calculated the boat’s direction and ordered a new heading. Logged data showed that the glider began responding to new commands within tens of seconds and usually aligned within a few minutes, with directional errors of only a few to about fifteen degrees. A second deployment off Dominica tested the full listening pipeline on real whales. There, the glider detected dozens of clicks within just a few seconds of data and separated them into up to seven distinct click sources, each with a stable direction, demonstrating that it can distinguish multiple whales in a busy underwater soundscape.
A New Tool for Whale Storytelling
This work shows that a quiet, slow‑moving underwater glider can act as a patient companion to sperm whales, steering itself based solely on the animals’ own sounds. Although long‑term, continuous following remains a goal for future missions, the demonstrated system already proves that onboard listening can safely guide the glider and untangle who is clicking from where. With further refinement, fleets of such gliders could build rich, long‑duration records linking whale movements, dive patterns, and vocal exchanges — helping scientists piece together the social lives and communication systems of these deep‑ocean giants while keeping human disturbance to a minimum.
Citation: Diamant, R., Pewzner, Y., Gubnitsky, G. et al. Backseat driver architecture to passively follow sperm whales by their voices with an autonomous underwater glider. Sci Rep 16, 8738 (2026). https://doi.org/10.1038/s41598-026-43138-y
Keywords: sperm whales, underwater glider, passive acoustic monitoring, autonomous ocean robots, marine conservation