Clear Sky Science · ru
Архитектура «заднего водителя» для пассивного сопровождения кашалотов по голосам с помощью автономного подводного планера
Слушающие роботы под волнами
Представьте, что вы отслеживаете одно из крупнейших животных на Земле не преследуя его на лодках и не прикрепляя к нему датчики, а тихо дрейфуя рядом и просто слушая. В этом исследовании описан новый способ сопровождать кашалотов в течение длительного времени с помощью автономного подводного планера, который «подслушивает» щелчки китов и корректирует курс соответственно. Такой подход обещает более бережные и продолжительные наблюдения, которые могут углубить наше понимание поведения китов и помочь защитить этих удивительных животных.
Почему важно следить за голосами китов
Кашалоты большую часть жизни проводят далеко под поверхностью океана, ныряя на сотни метров и общаясь сериями быстрых щелчков и упорядоченными «кодовыми» последовательностями. Биологи хотят связать эти звуки с конкретным поведением, родовыми связями и перемещениями, но большинство существующих инструментов не справляются. Буйки или микрофоны на кораблях работают только тогда, когда киты находятся поблизости, а присосочные метки держатся относительно недолго. Это затрудняет изучение того, как отдельные особи и группы ведут себя и общаются в течение дней или недель, путешествуя по открытому океану.
Беззвучный планер как подводный разведчик
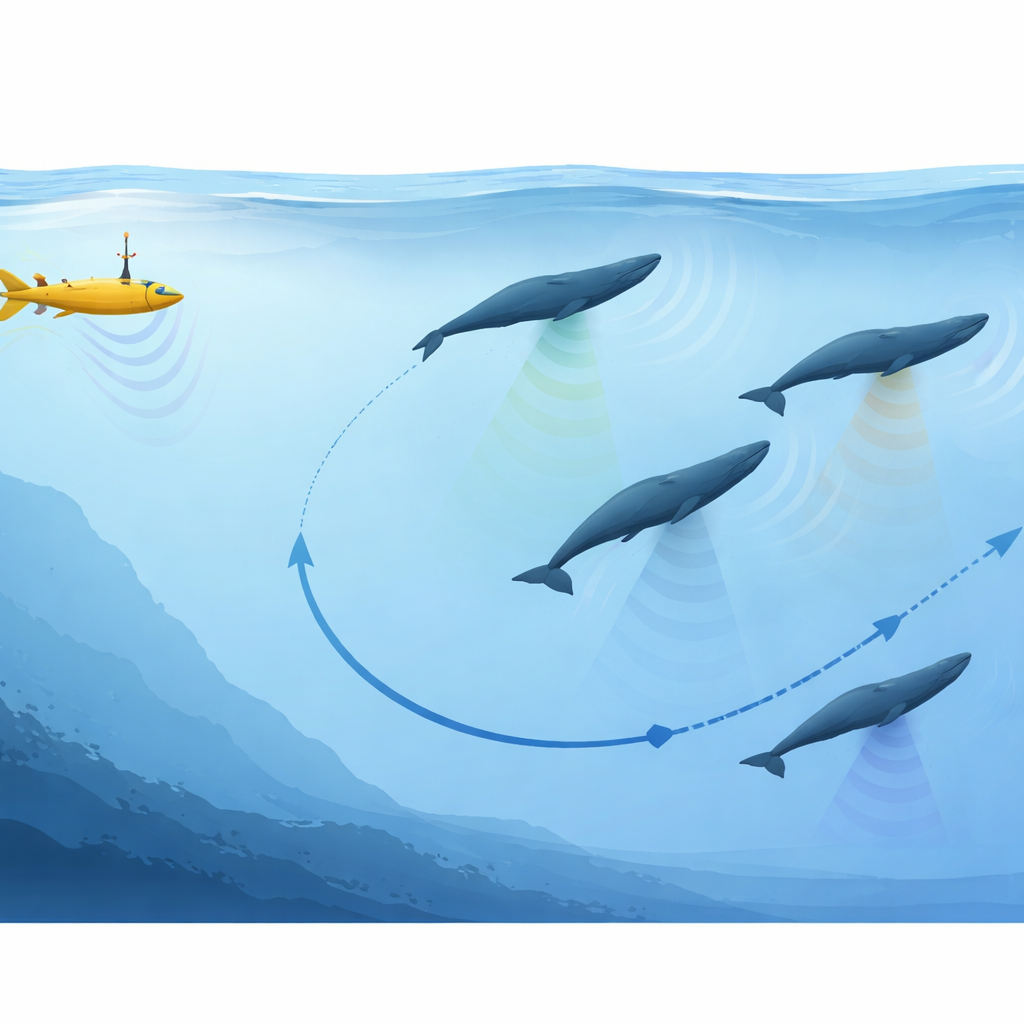
Исследователи обратились к другому типу робота: подводному планеру. В отличие от субмарин с гребным винтом, планер перемещается за счёт изменения плавучести и сдвига внутреннего аккумулятора, поднимаясь или опускаясь в медленных плавных дугах. Такая конструкция чрезвычайно энергоэффективна и очень бесшумна, что позволяет выполнять миссии длительностью недели или месяцы. На планере Project CETI–SeaExplorer команда установила компактную решётку из четырёх микрофонов в носовой части, расположенную в небольшой трёхмерной конфигурации. По мере того как планер ныряет и всплывает на глубины от десятков до сотен метров, эта решётка непрерывно записывает подводный звуковой фон, а основной компьютер аппарата управляет миссией.
«Задний водитель», который слушает и рулит
Чтобы превратить планер в преследователя китов, авторы добавили так называемого «заднего водителя» — второй бортовой компьютер, который слушает входящие звуки и может предлагать изменения курса. Этот научный контроллер работает в рамках программной среды робототехники и использует данные всех датчиков планера. Сначала он обнаруживает резкие широкополосные щелчки, которые издают кашалоты, отделяя их от фоновых шумов, таких как щёлканье креветок или шум волн. Затем он оценивает направление, откуда приходит каждый щелчок, сравнивая крошечные разницы по времени между четырьмя микрофонами. Группируя щелчки по времени и направлению, система разделяет перекрывающиеся серии щелчков на индивидуальные источники, эффективно различая нескольких китов, которые звучат одновременно.
Как выбирают, за каким китом следовать
После сортировки щелчков «задний водитель» выбирает «цель» — обычно кита, чьи щелчки самые сильные или самые частые, что обычно указывает на ближайшее животное. Контроллер преобразует измеренный азимут кита в новое желаемое направление для планера и отправляет эту команду основному навигационному компьютеру. Планер отвечает медленным поворотом внутреннего аккумулятора, чтобы повернуться в сторону цели, продолжая при этом свою траекторию погружений. Чтобы избежать постоянного зигзагообразного движения, процесс прослушивания приостанавливается на заранее заданное время после каждого изменения курса; паузы короче, когда сигналы кита громкие и чёткие. На всём протяжении встроенные проверки безопасности гарантируют, что запрошенная глубина или угол остаются в пределах рабочих ограничений планера.
Испытание системы в море
Команда провела два основных эксперимента. В контролируемом испытании у южного побережья Франции они подвесили подводный громкоговоритель с лодки и воспроизвели записанные щелчки кашалотов, пока планер выполнял серию погружений. Каждый раз, когда планер слышал щелчки, «задний водитель» вычислял направление на лодку и отдавал команду нового курса. Записи показали, что планер начинал реагировать на новые команды в течение десятков секунд и обычно выравнивался в течение нескольких минут, с угловой погрешностью от нескольких до примерно пятнадцати градусов. Второе развертывание у берегов Доминики протестировало всю систему прослушивания на настоящих китах. Там планер обнаружил десятки щелчков в считанные секунды записи и разделил их на до семи различных источников щелчков, каждый с устойчивым направлением, показав, что он может различать нескольких китов в насыщенной подводной звуковой среде.
Новый инструмент для рассказа о китах
Эта работа демонстрирует, что тихий медленно движущийся подводный планер способен выступать в роли терпеливого компаньона кашалотов, ориентируясь исключительно по самим звукам животных. Хотя долгосрочное непрерывное сопровождение остаётся задачей для будущих миссий, продемонстрированная система уже доказывает, что бортовое прослушивание может безопасно направлять планер и распутывать, кто и откуда издаёт щелчки. С дальнейшим совершенствованием флотилии таких планеров могли бы создавать богатые долгосрочные записи, связывающие перемещения китов, модели погружений и вокальные обмены — помогая учёным воссоздать социальную жизнь и системы общения этих гигантов глубокого океана при минимальном вмешательстве человека.
Цитирование: Diamant, R., Pewzner, Y., Gubnitsky, G. et al. Backseat driver architecture to passively follow sperm whales by their voices with an autonomous underwater glider. Sci Rep 16, 8738 (2026). https://doi.org/10.1038/s41598-026-43138-y
Ключевые слова: кашалоты, подводный планер, пассивный акустический мониторинг, автономные океанические роботы, сохранение морской среды