Clear Sky Science · fr
Architecture "conducteur de banquette arrière" pour suivre passivement les cachalots par leurs voix avec un planeur sous‑marin autonome
Robots à l’écoute sous les vagues
Imaginez suivre l’un des plus grands animaux de la planète non pas en le poursuivant avec des bateaux ou en lui fixant des appareils, mais en dérivant silencieusement à ses côtés et en écoutant simplement. Cette étude décrit une nouvelle méthode pour shadower des cachalots sur de longues durées à l’aide d’un planeur sous‑marin autonome qui « écoute » les clics des cétacés et se dirige en conséquence. Cette approche promet des observations plus douces et plus durables, susceptibles d’approfondir notre compréhension du comportement des baleines et d’aider à protéger ces animaux remarquables.
Pourquoi il est important de suivre les voix des baleines
Les cachalots passent une grande partie de leur vie loin de la surface, plongeant à plusieurs centaines de mètres et communiquant par des clics très brefs et des « codas » rythmiques. Les biologistes cherchent à relier ces sons à des comportements, des liens familiaux et des déplacements spécifiques, mais la plupart des outils actuels sont insuffisants. Les bouées dérivantes ou les micros embarqués sur des navires ne fonctionnent que tant que les baleines restent à proximité, et les balises à ventouses se détachent après des durées relativement courtes. Il est donc difficile d’étudier comment individus et groupes se comportent et communiquent sur des périodes de jours à semaines lorsqu’ils traversent l’océan ouvert.
Un planeur silencieux comme éclaireur sous‑marin
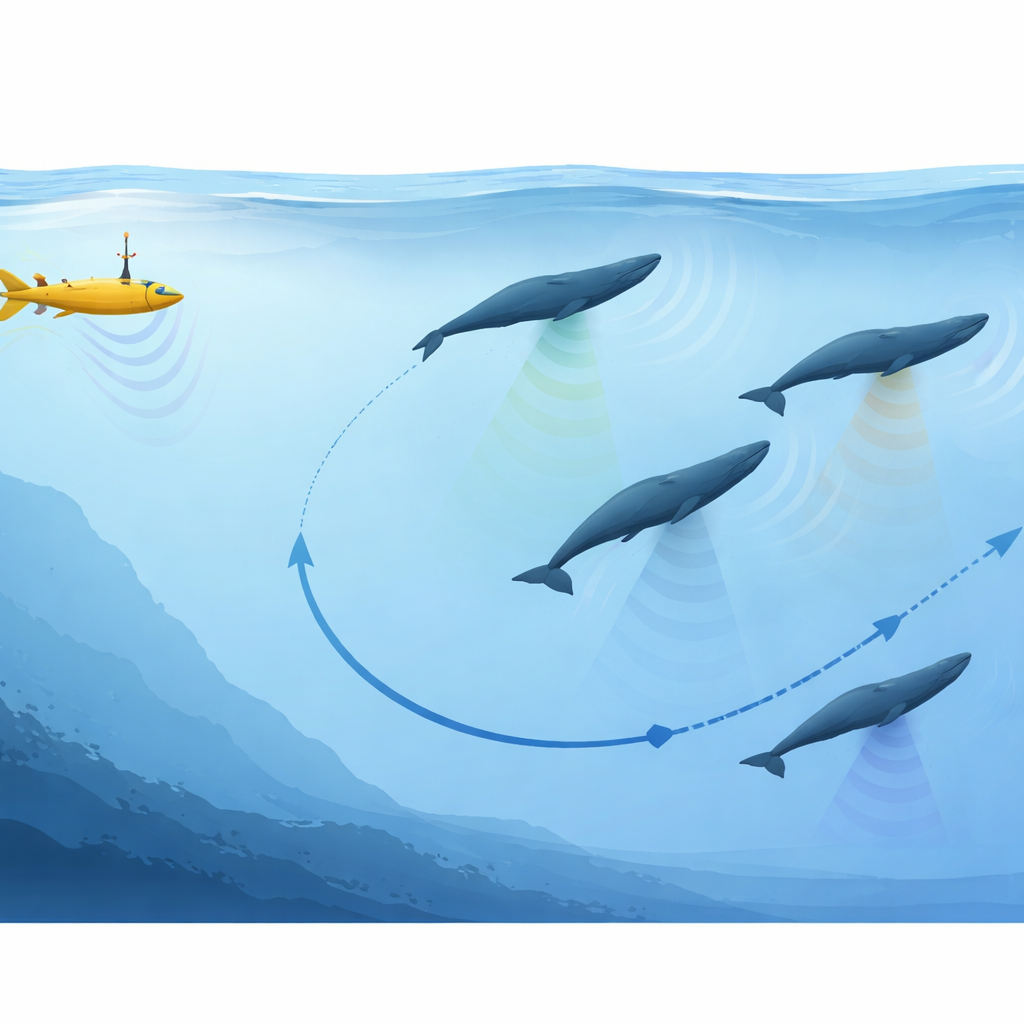
Les chercheurs se sont tournés vers un autre type de robot : le planeur sous‑marin. Contrairement aux sous‑marins à hélice, un planeur se déplace en modifiant sa flottabilité et en déplaçant une batterie interne pour monter ou descendre selon des arcs lents et doux. Ce principe est extrêmement économe en énergie et très silencieux, ce qui permet des missions durant des semaines ou des mois. Sur le planeur Project CETI–SeaExplorer, l’équipe a monté un petit réseau de quatre microphones à l’étrave, disposés en une configuration tridimensionnelle compacte. Alors que le planeur plonge et remonte entre quelques dizaines et plusieurs centaines de mètres, ce réseau enregistre en continu le paysage sonore sous‑marin pendant que l’ordinateur principal du véhicule pilote la mission.
Un « cerveau de banquette arrière » qui écoute et dirige
Pour transformer le planeur en suiveur de baleines, les auteurs ont ajouté ce qu’ils appellent un « conducteur de banquette arrière » — un second ordinateur embarqué qui écoute les sons entrants et peut proposer des changements de cap. Ce contrôleur scientifique fonctionne dans un cadre logiciel robotique et exploite l’ensemble des capteurs du planeur. D’abord, il détecte les clics brefs et à large bande produits par les cachalots, en les séparant des bruits de fond tels que les crevettes claquantes ou la houle. Ensuite, il estime la direction d’arrivée de chaque clic en comparant d’infimes différences de temps entre les quatre microphones. En regroupant les clics au fil du temps et par direction, le système sépare les trains de clics qui se chevauchent en sources individuelles, démêlant efficacement plusieurs cachalots appelant en même temps.
Choisir quelle baleine suivre
Une fois les clics triés, le conducteur de banquette sélectionne une « cible », généralement la baleine dont les clics sont les plus forts ou les plus fréquents, ce qui indique habituellement l’animal le plus proche. Le contrôleur convertit le relèvement mesuré de cette baleine en un nouveau cap souhaité pour le planeur et envoie cette consigne à l’ordinateur de navigation principal. Le planeur répond en faisant lentement pivoter sa batterie interne pour s’orienter vers la cible tout en poursuivant son profil de plongée. Pour éviter des zigzags constants, le processus d’écoute se met en pause pendant un temps prédéfini après chaque changement de cap, avec des pauses plus courtes lorsque les signaux de la baleine sont forts et clairs. À tout moment, des vérifications de sécurité intégrées garantissent que toute profondeur ou inclinaison demandée reste dans les limites opérationnelles du planeur.
Éprouver le système en mer
L’équipe a réalisé deux essais principaux. Dans une expérience contrôlée au large du sud de la France, ils ont suspendu un haut‑parleur sous‑marin depuis un bateau et rejoué des clics enregistrés de cachalots pendant que le planeur effectuait une série de plongées. Chaque fois que le planeur entendait les clics, le conducteur de banquette calculait la direction du bateau et ordonnait un nouveau cap. Les données enregistrées ont montré que le planeur commençait à répondre aux nouvelles commandes en quelques dizaines de secondes et s’alignait généralement en quelques minutes, avec des erreurs directionnelles de seulement quelques degrés à une quinzaine de degrés environ. Un second déploiement au large de la Dominique a testé la chaîne d’écoute complète sur des cachalots réels. Là, le planeur a détecté des dizaines de clics en quelques secondes de données seulement et les a séparés en jusqu’à sept sources de clic distinctes, chacune avec une direction stable, démontrant qu’il peut distinguer plusieurs individus dans un paysage sonore sous‑marin fréquenté.
Un nouvel outil pour raconter l’histoire des baleines
Ce travail montre qu’un planeur sous‑marin lent et silencieux peut agir comme un compagnon patient des cachalots, se dirigeant uniquement d’après les sons produits par les animaux. Bien que le suivi continu et sur le long terme reste un objectif pour de futures missions, le système démontré prouve déjà que l’écoute embarquée peut guider le planeur en toute sécurité et démêler qui claque et d’où. Avec des améliorations, des flottes de tels planeurs pourraient constituer des enregistrements riches et de longue durée reliant déplacements, profils de plongée et échanges vocaux — aidant les scientifiques à reconstituer la vie sociale et les systèmes de communication de ces géants des grands fonds tout en minimisant les perturbations humaines.
Citation: Diamant, R., Pewzner, Y., Gubnitsky, G. et al. Backseat driver architecture to passively follow sperm whales by their voices with an autonomous underwater glider. Sci Rep 16, 8738 (2026). https://doi.org/10.1038/s41598-026-43138-y
Mots-clés: cachalots, planeur sous‑marin, surveillance acoustique passive, robots océaniques autonomes, conservation marine