Clear Sky Science · sv
Backseat driver-arkitektur för att passivt följa spermakvalar efter deras röster med en autonom undervattenglider
Lyssnande robotar under vågorna
Föreställ dig att spåra ett av jordens största djur inte genom att jaga det med båtar eller fästa prylar på dess kropp, utan genom att tyst driva tillsammans med det och helt enkelt lyssna. Denna studie beskriver ett nytt sätt att skugga spermakvalar under långa perioder med en autonom undervattenglider som ”avlyssnar” valarnas klickljud och styr sig därefter. Metoden lovar mjukare, längre observationer som kan fördjupa vår förståelse av valbeteenden och hjälpa till att skydda dessa anmärkningsvärda djur.
Varför det är viktigt att följa valars röster
Spermakvalar tillbringar stora delar av sina liv långt under ytan, dyker hundratals meter och kommunicerar med snabba klick och mönstrade ”kodor”. Biologer vill koppla dessa ljud till specifika beteenden, släktskap och rörelsemönster, men de flesta nuvarande verktyg räcker inte till. Flytande boj eller fartygsbaserade mikrofoner fungerar bara medan valarna är i närheten, och sugkoppssändare lossnar efter relativt kort tid. Det gör det svårt att studera hur individer och grupper beter sig och kommunicerar under dagar till veckor när de rör sig genom öppet hav.
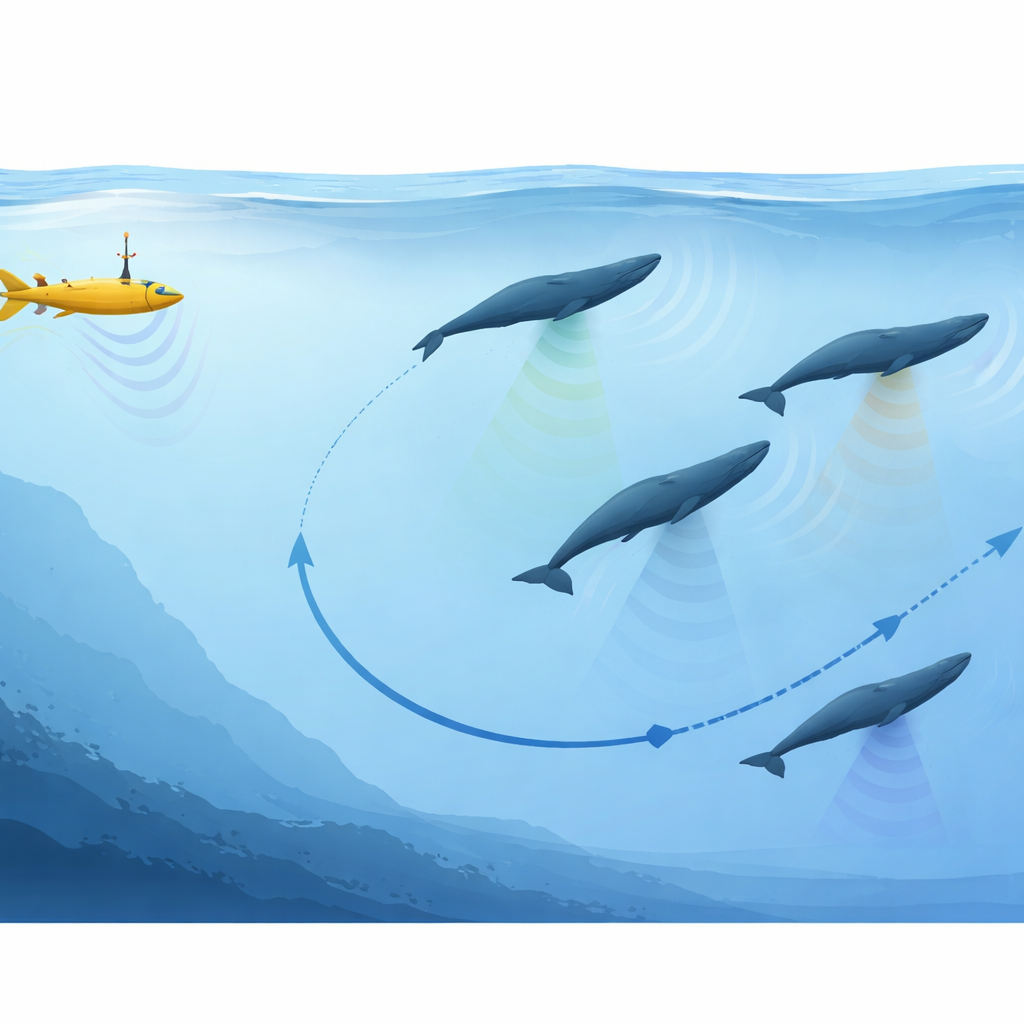
En tyst glider som undervattensspanare
Forskarna vände sig till en annan typ av robot: en undervattenglider. Till skillnad från propellerdrivna ubåtar rör sig en glider genom att ändra sin flytkraft och flytta ett internt batteri för att klättra eller sjunka i långsamma, mjuka bågar. Denna design är extremt energieffektiv och mycket tyst, vilket möjliggör uppdrag som kan pågå i veckor eller månader. På Project CETI–SeaExplorer-glidaren monterade teamet en kompakt fyrmikrofonmatris i nosen, ordnad i ett litet tredimensionellt mönster. När glidaren dyker och stiger mellan tiotals och hundratals meter spelar denna matris kontinuerligt in undervattensljudlandskapet medan fordonets huvuddator styr uppdraget.
En bakåtsittande hjärna som lyssnar och styr
För att förvandla glidaren till en valeföljare lade författarna till vad de kallar en ”backseat driver” — en andra omborddator som lyssnar på inkommande ljud och kan föreslå kursändringar. Denna vetenskapliga controller körs inom en robotikmjukvaruramverk och hämtar data från alla glidarens sensorer. Först upptäcker den de skarpa, bredbandsklick som produceras av spermakvalar och skiljer dem från bakgrundsljud som knäppande räkor eller vågor. Sedan uppskattar den riktningen varje klick kommer ifrån genom att jämföra små tidsskillnader mellan de fyra mikrofonerna. Genom att gruppera klick över tid och efter riktning separerar systemet överlappande klickserier i individuella källor och lyckas på så vis urskilja flera valar som ropar samtidigt.
Att välja vilken val att följa
När klickarna är sorterade väljer backseat-drivern en ”målsatt” val, vanligtvis den vars klick är starkast eller mest frekventa, vilket oftast indikerar det närmaste djuret. Controllern omvandlar den uppmätta bäringen till valen till en ny önskad kurs för glidaren och skickar detta kommando till huvudnavigationsdatorn. Glidaren svarar genom att långsamt rotera sitt interna batteri för att svänga mot målet samtidigt som den fortsätter sitt dykningsmönster. För att undvika konstant zig‑zag-pendling pausas lyssningsprocessen under en förinställd tid efter varje kursändring, med kortare pauser när valens signaler är tydliga och höga. Genom hela förloppet ser inbyggda säkerhetskontroller till att begärd djup eller vinkel håller sig inom glidarens driftgränser.
Att sätta systemet på prov till sjöss
Teamet genomförde två huvudsakliga försök. I ett kontrollerat experiment utanför södra Frankrike hängde de en undervattenshögtalare från en båt och spelade upp inspelade spermakvalsklick medan glidaren utförde en serie dyk. Varje gång glidaren hörde klicken beräknade backseat-drivern båtens riktning och gav en ny kursorder. Loggade data visade att glidaren började reagera på nya kommandon inom tiotals sekunder och vanligtvis ställde in sig inom några minuter, med riktfel på bara några till omkring femton grader. En andra utplacering utanför Dominica testade hela lyssningskedjan på verkliga valar. Där upptäckte glidaren dussintals klick inom bara några sekunder inspelning och separerade dem i upp till sju distinkta klickkällor, var och en med stabil riktning, vilket visar att den kan skilja flera valar i ett brusigt undervattensljudlandskap.
Ett nytt verktyg för valberättande
Dessa arbeten visar att en tyst, långsamt rörlig undervattenglider kan fungera som en tålmodig följeslagare till spermakvalar och styra sig enbart baserat på djurens egna ljud. Även om långtidsföljning under kontinuerliga perioder återstår som ett mål för framtida uppdrag, bevisar det demonstrerade systemet redan att ombordlyssning säkert kan styra glidaren och reda ut vem som klickar varifrån. Med fortsatt förfining skulle flottor av sådana glidare kunna bygga rika, långvariga register som kopplar valarnas rörelser, dykningsmönster och vokala utbyten — och hjälpa forskare att pussla ihop de sociala liv och kommunikationssystem hos dessa djuphavsjättar samtidigt som mänsklig påverkan hålls på ett minimum.
Citering: Diamant, R., Pewzner, Y., Gubnitsky, G. et al. Backseat driver architecture to passively follow sperm whales by their voices with an autonomous underwater glider. Sci Rep 16, 8738 (2026). https://doi.org/10.1038/s41598-026-43138-y
Nyckelord: spermakvalar, undervattenglider, passiv akustisk övervakning, autonoma oceanrobotar, marin bevarande