Clear Sky Science · ja
自律型水中グライダーでマッコウクジラの音声を受動的に追跡する“バックシート・ドライバー”アーキテクチャ
波間に潜む「聴く」ロボット
世界で最も大きな動物の一つを、船で追いかけたり装置を体に取り付けたりするのではなく、静かに横へ漂いながらただ耳を澄ますことで追跡すると想像してみてください。本研究は、マッコウクジラのクリック音を“盗み聞き”して進路を制御する自律型水中グライダーを用い、長時間にわたってクジラを追尾する新しい方法を示します。この手法は、より穏やかで継続的な観察を可能にし、クジラの行動理解を深め、これらの驚くべき生物の保護に寄与する可能性があります。
クジラの声を追う意味
マッコウクジラは生涯の多くを海面下深くで過ごし、数百メートル潜水して高速のクリックやパターン化された「コーダ」を発します。生物学者はこれらの音を特定の行動、家族関係、移動と結びつけたいと考えていますが、現状の多くの手段では限界があります。浮体ブイや船舶搭載のマイクはクジラが近くにいる間だけ機能し、吸盤タグは比較的短期間で外れてしまいます。そのため、個体や群れが公海を移動する数日から数週間にわたる行動やコミュニケーションを研究するのは困難です。
沈黙のグライダー——水中偵察機
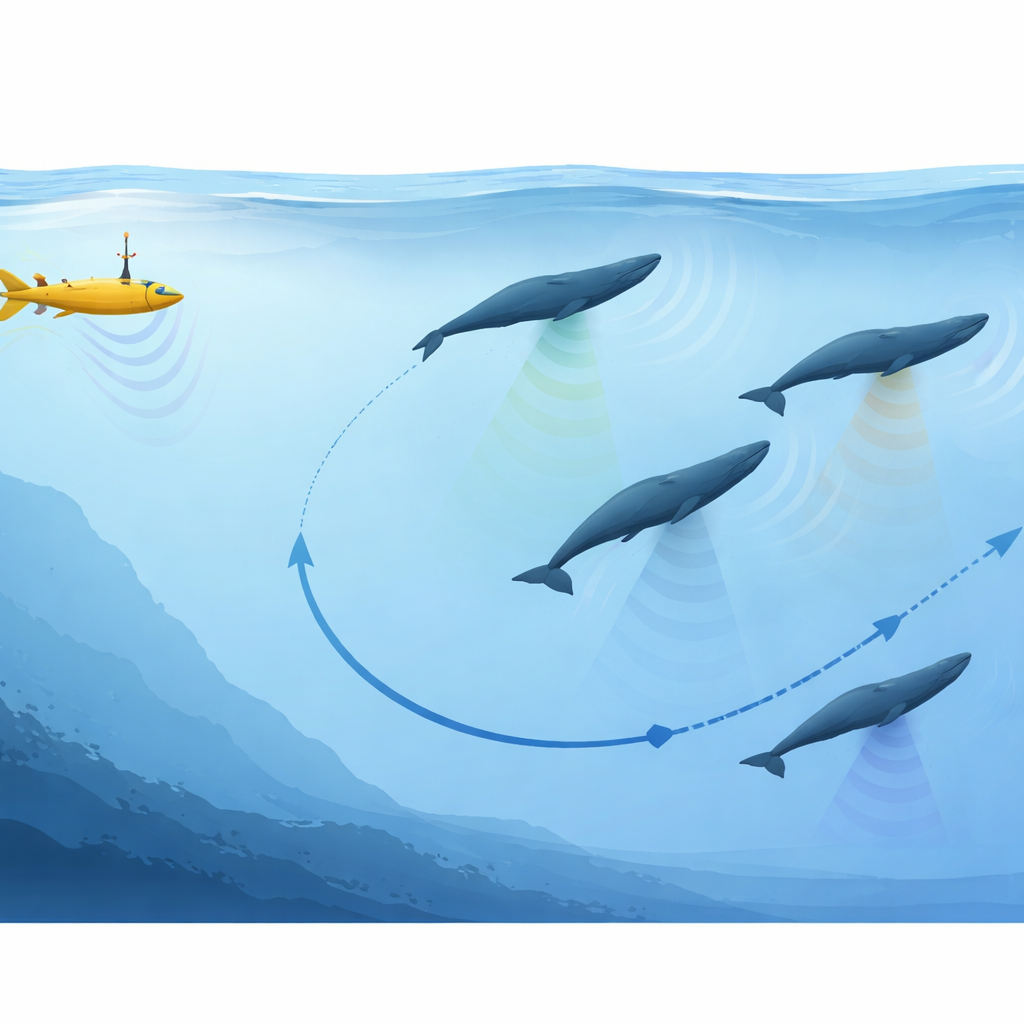
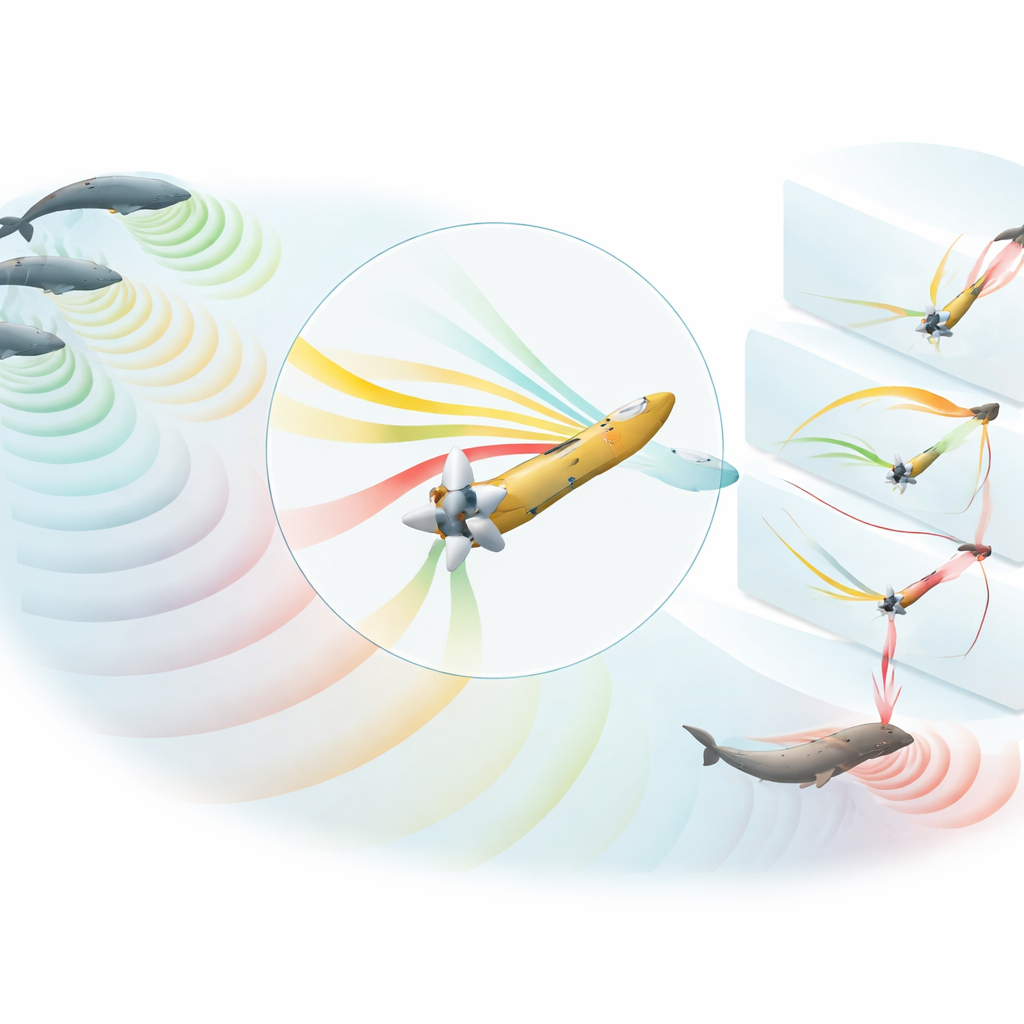
研究者たちは別種のロボット、つまり水中グライダーに着目しました。推進器で動く潜水機とは異なり、グライダーは浮力を変え、内部のバッテリーを移動させてゆっくりとした穏やかな弧を描いて上昇や下降を行います。この設計は非常に省エネルギーで音も小さく、数週間から数か月に及ぶミッションを可能にします。Project CETI–SeaExplorer のグライダーには、機首にコンパクトな4つのマイクロフォンアレイを3次元配置で搭載しました。グライダーが数十〜数百メートルの間を潜降・上昇する間、このアレイは継続的に水中の音環境を記録し、車両の主コンピュータが航行を管理します。
聞いて操舵する「バックシートの頭脳」
グライダーをクジラの追跡機にするために、著者らは「バックシート・ドライバー」と呼ぶ第二の搭載コンピュータを追加しました。これが受信音を聴いて進路変更を提案します。この科学的制御装置はロボティクス用ソフトウェアフレームワーク内で動作し、グライダーの全てのセンサーにアクセスします。まず、マッコウクジラが発する鋭い広帯域クリックを検出し、バッキングノイズ(ハサミムシや波など)から分離します。次に、4つのマイク間の微小な到達時間差を比べることで各クリックの入射方向を推定します。クリックを時間と方向でまとまりに分けることで、システムは重なり合うクリック列を個々の発信源に分離し、同時に鳴く複数のクジラを識別します。
どのクジラを追うかを選ぶ
クリックが分類されると、バックシート・ドライバーは「ターゲット」クジラを選びます。通常、クリックが最も強いか頻度が高い個体—たいていは最も近い個体—が選ばれます。制御装置は測定した方位をグライダーの新たな目標針路に変換し、主航行コンピュータへ指令を送ります。グライダーは内部バッテリーをゆっくり回転させて目標へ向けて機首を変えつつ、潜降・上昇のパターンを続けます。絶え間ないジグザグ動作を避けるため、針路変更の後は所定の時間だけ聴取を一時停止し、クジラの信号が大きく明瞭なときには短い停止時間が採られます。常に組み込まれた安全チェックにより、要求される深度や角度がグライダーの運用限界内にあることが保証されます。
海上でのシステム実験
チームは主に二つの試験を実施しました。フランス南部沿岸の制御実験では、船から水中スピーカーをつり下げ、録音済みのマッコウクジラのクリックを再生しながらグライダーに一連の潜航を行わせました。グライダーがクリックを検出するたびにバックシート・ドライバーは船の方位を算出して新しい針路を指示しました。ログデータは、グライダーが数十秒以内に新しい指令に反応し、通常数分以内に整列し、方向誤差は数度から約15度程度に収まることを示しました。ドミニカ沖での二度目の実装では実際のクジラを相手に完全な聴取パイプラインを試験しました。そこでは、グライダーが数秒のデータ内で数十回のクリックを検出し、それらを最大で七つの異なるクリック源に分離して、それぞれ安定した方向を保持することを示し、賑やかな水中音景の中でも複数のクジラを区別できることを実証しました。
クジラの物語を紡ぐ新しい道具
本研究は、静かでゆっくり動く水中グライダーが、クジラ自身の音だけを手がかりにして辛抱強い伴走者となりうることを示しています。長期かつ連続的な追跡は今後のミッションでの目標ですが、今回示されたシステムは既に搭載型の聴取がグライダーを安全に誘導し、どこから誰がクリックしているかを解きほぐせることを証明しています。さらなる洗練により、こうしたグライダーの艦隊がクジラの移動、潜水パターン、発声のやり取りを結びつける長期にわたる豊富な記録を構築し得る — 人間の撹乱を最小限に抑えつつ、深海の巨人たちの社会生活やコミュニケーションの仕組みを解き明かす手助けとなるでしょう。
引用: Diamant, R., Pewzner, Y., Gubnitsky, G. et al. Backseat driver architecture to passively follow sperm whales by their voices with an autonomous underwater glider. Sci Rep 16, 8738 (2026). https://doi.org/10.1038/s41598-026-43138-y
キーワード: マッコウクジラ, 水中グライダー, 受動音響モニタリング, 自律型海洋ロボット, 海洋保全