Clear Sky Science · zh
用于水下机器人预定时间跟踪控制
海底按时行动的机器人
自主水下航行器——那些在海洋中巡航的鱼雷形机器人——越来越多地被赋予绘制海底、检查海上结构和监测海洋生态等任务。这些任务常常有时间约束:多台车辆必须在同一时间同一地点会合、在船只经过前完成区域扫描,或在拥挤水域避开障碍物。本文提出了一种新的驾驶方法,保证机器人在精确的、由用户指定的时间内收敛到其计划轨迹,即使洋流把它们推离航道或其精确行为难以建模。
为何时机对海洋机器人至关重要
传统的水下机器人制导方法侧重于最终缩小机器人当前位置与目标位置之间的差距。一种广泛使用的方法称为滑模控制,它因能在车辆或海洋环境模型不完备时仍保持机器人在轨而备受推崇。但对于时间敏感的任务,它有一个关键缺点:收敛到期望路径所需的时间取决于机器人起始偏差和运动细节,因此操作者无法提前轻易知道收敛会花多长时间。对于要求精确同步或严格安全裕度的任务,这种不确定性可能代价高昂甚至危险。
内置最后期限的转向方法
作者提出了一种预定时间控制策略,将期望的收敛时间直接嵌入控制律中。与其仅仅承诺误差“最终”会消失,该方法允许工程师指定一个收敛时限——例如用于快速机动的几秒钟或用于平缓反应的更长时间——并设计控制信号以保证位置和速度误差在该时限之前趋于零,无论机器人的起始状态如何。该方案通过两层结构实现:外层根据机器人与目标路径的偏离计算纵向和横向期望速度,内层产生推进力使实际速度匹配这些期望速度。精心选择的数学能量函数证明了这种组合必然会在规定时间内将机器人拉回到其路径上。
将该方法付诸检验
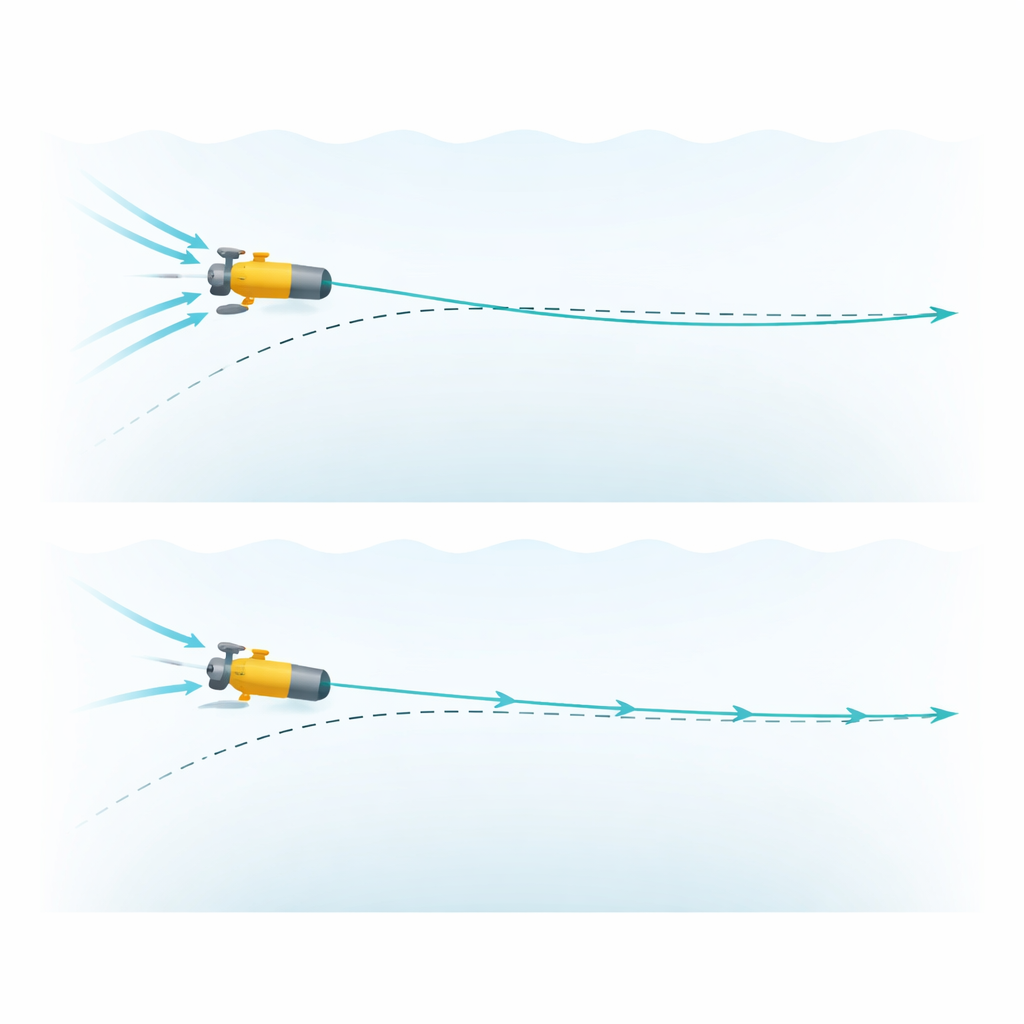
为比较这种有保证时间的转向方法与更常见的做法,研究人员将两者应用于一个著名水下航行器 REMUS-100 的详细计算机模型。他们要求虚拟机器人在水平面内跟踪两类轨迹:一个平滑的圆形和一个曲率不断变化、要求更高的花形回路。对新控制器,他们尝试了多种收敛时间,从非常快到较为宽松。结果表明,两种方法最终都能引导机器人沿所需曲线行进,但在设定时限较短时,预定时间控制器更快到达轨迹,而较长的时限则带来更为平缓的运动。
在速度、耗力与稳定性之间的权衡
研究不仅停留在对轨迹的直观比较。它统计了机器人随时间偏离期望航迹的程度、推进器需输出的力、消耗的机械能以及机器人稳定后力命令的平滑性。当收敛时间被设定得很短时,新控制器显著降低了跟踪误差,但需要尖锐的推力脉冲和更高的能量消耗。随着允许收敛时间的延长,这些推力及相应的能量使用下降,控制动作变得和滑模控制一样平滑甚至更平滑,同时仍能让机器人更贴近其路径。即便在研究者引入强洋流、车辆参数大幅变化和噪声传感读数的情况下,两种方法都保持了鲁棒性,但预定时间控制器保持了更紧的跟踪。
这对未来海洋任务的意义
对于规划水下机器人编队的操作者,核心信息是他们现在可以以透明的方式在速度和耗力之间进行权衡,并且关键在于能够保证机器人何时会收敛到既定航线。如果任务需要严格的时间控制——例如协调多台车辆、检查移动目标或快速避险——预定时间控制器提供了精确且可调的收敛能力。当长期平滑性和最小执行器磨损比原始速度更重要时,传统方法仍有优势。通过清晰地描绘这些权衡,这项工作为在真实海域中实现更可预测、更可靠和更高效的水下机器人制导奠定了基础。
引用: Keymasi-Khalaji, A., Tajpour-Fard, S. Predefined-time tracking control for underwater robots. Sci Rep 16, 10218 (2026). https://doi.org/10.1038/s41598-026-40596-2
关键词: 水下机器人, 轨迹跟踪, 有界时间控制, 机器人导航, 海洋自主