Clear Sky Science · de
Vordefinierte Zeitführung für Unterwasserroboter
Roboter mit festem Zeitplan unter dem Meer
Autonome Unterwasserfahrzeuge — torpedoähnliche Roboter, die die Ozeane durchqueren — werden zunehmend für Aufgaben wie die Kartierung des Meeresbodens, die Inspektion von Offshore‑Anlagen und die Überwachung mariner Ökosysteme eingesetzt. Viele dieser Einsätze sind zeitkritisch: mehrere Fahrzeuge müssen zur selben Zeit am selben Ort sein, ein Bereich muss vor dem Eintreffen eines Schiffes gescannt werden oder Hindernissen in dichtem Verkehr ausgewichen werden. Diese Studie stellt eine neue Methode zur Steuerung solcher Roboter vor, mit der sich gewährleisten lässt, dass sie innerhalb einer präzise vom Nutzer gewählten Zeit auf ihre geplante Bahn einschwenken — selbst wenn Strömungen sie ablenken oder ihr genaues Verhalten schwer zu modellieren ist.
Warum Timing für Ozeanroboter wichtig ist
Konventionelle Führungs‑ und Regelverfahren für Unterwasserroboter konzentrieren sich darauf, den Abstand zwischen aktueller und gewünschter Position schließlich zu verringern. Ein weit verbreiteter Ansatz, die Sliding‑Mode‑Regelung, wird geschätzt, weil sie das Fahrzeug auf Kurs hält, selbst wenn das Modell des Fahrzeugs oder der Meeresumgebung unvollständig ist. Sie hat jedoch einen wesentlichen Nachteil bei zeitkritischen Missionen: Die benötigte Einschwingzeit hängt davon ab, wie weit der Roboter zu Beginn abweicht und von Details der Bewegung, sodass Betreiber im Vorfeld nur schwer vorhersagen können, wie lange die Konvergenz dauern wird. Bei Aufgaben, die präzise Synchronisation oder enge Sicherheitsabstände verlangen, kann diese Unsicherheit kostspielig oder sogar gefährlich sein.
Eine Steuerungsmethode mit integriertem Stichtag
Die Autoren entwickeln eine vordefinierte‑Zeit‑Regelungsstrategie, die die gewünschte Einschwingzeit direkt in das Steuerungsgesetz einbettet. Anstatt lediglich zu versprechen, dass Fehler „irgendwann“ verschwinden, erlaubt die Methode einem Ingenieur, einen Konvergenzhorizont vorzugeben — etwa wenige Sekunden für ein schnelles Manöver oder länger für ein sanfteres Verhalten — und gestaltet die Stellgrößen so, dass sowohl Positions‑ als auch Geschwindigkeitsfehler garantiert vor Ablauf dieser Frist gegen null gehen, unabhängig vom Startpunkt des Roboters. Dies wird durch ein zweistufiges Konzept erreicht: Eine Außenschleife berechnet die gewünschten Geschwindigkeiten in Vorwärts‑ und Seitenrichtung des Roboters basierend auf der Abweichung zur Ziellinie, und eine Innenschleife erzeugt die Schubkräfte, die nötig sind, damit die realen Geschwindigkeiten diesen Sollwerten folgen. Sorgfältig gewählte mathematische Energiefunktionen zeigen beweisbar, dass diese Kombination den Roboter innerhalb der vorgegebenen Zeit auf die Bahn zieht.
Erprobung der Methode
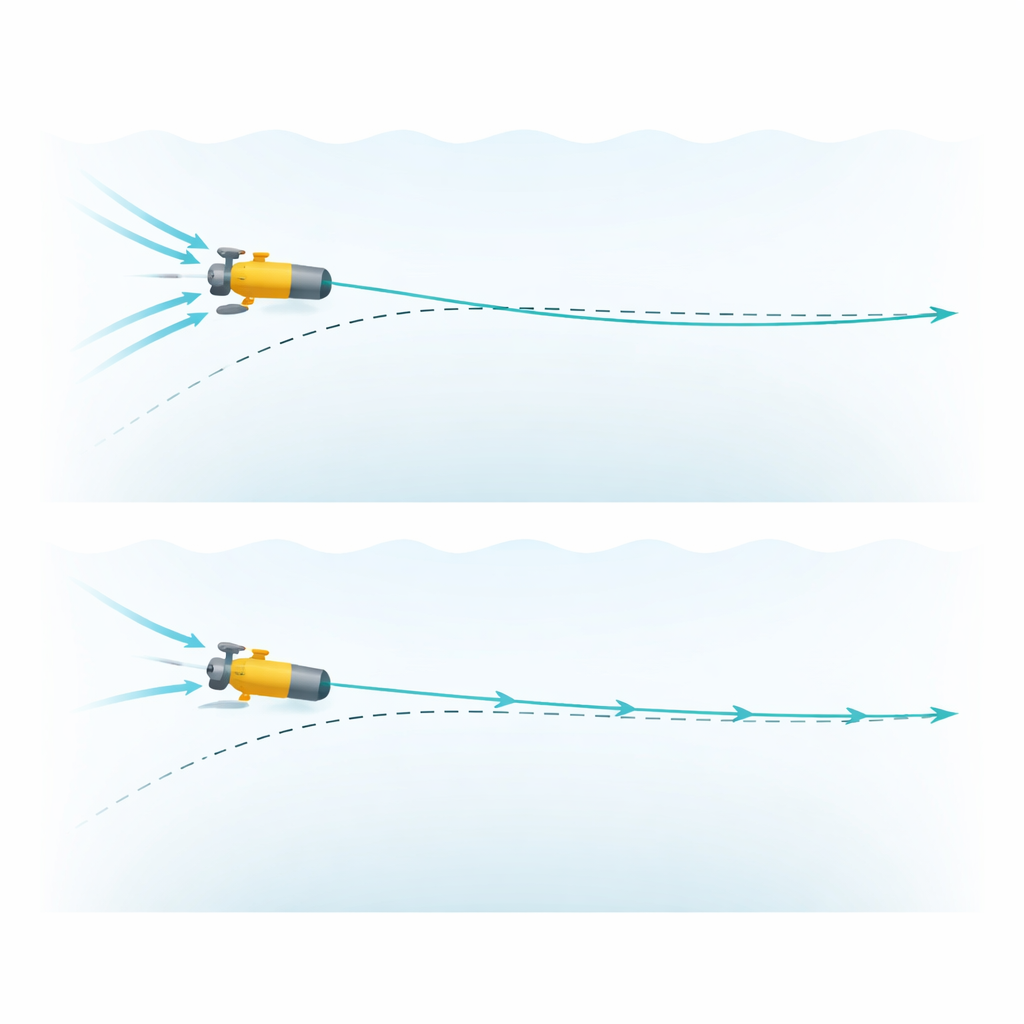
Um zu prüfen, wie sich diese zeitgarantierte Steuerung gegenüber einem vertrauten Ansatz schlägt, wenden die Forschenden beide Methoden auf ein detailliertes Computermodell eines bekannten Unterwasserfahrzeugs namens REMUS‑100 an. Sie lassen den virtuellen Roboter zwei Pfadtypen in einer Horizontalebene verfolgen: einen glatten Kreis und eine anspruchsvollere, blütenförmige Schleife mit variierender Krümmung. Für den neuen Regler testen sie mehrere Einschwingzeiten, von sehr schnell bis entspannter. Die Ergebnisse zeigen, dass beide Methoden den Roboter schließlich entlang der gewünschten Kurven führen können, der vordefinierte‑Zeit‑Regler die Bahn jedoch früher erreicht, wenn sein Zeithorizont kurz ist, während längere Horizonte zu sanfterem Verhalten führen.
Abwägung von Geschwindigkeit, Aufwand und Stabilität
Die Studie geht über einfache Sichtvergleiche der Bahnen hinaus. Sie erfasst, wie stark der Roboter im Zeitverlauf von der gewünschten Spur abweicht, welche Kräfte die Schubdüsen leisten müssen, wie viel mechanische Energie verbraucht wird und wie glatt die Kraftkommandos sind, nachdem der Roboter eingeschwungen ist. Wird eine sehr kurze Einschwingzeit gewählt, reduziert der neue Regler die Verfolgungsfehler deutlich, verlangt dafür aber kräftige Schubstöße und energetisch aufwändigere Manöver. Mit zunehmender erlaubter Einschwingzeit sinken diese Kräfte und der Energiebedarf, und die Steuerbefehle werden so sanft — oder sanfter — als bei der Sliding‑Mode‑Regelung, während der Roboter weiterhin näher an seiner Bahn bleibt. Selbst wenn die Forschenden starke Strömungen, große Änderungen der Fahrzeugparameter und verrauschte Sensordaten einbringen, bleiben beide Verfahren robust, doch der vordefinierte‑Zeit‑Regler hält die Verfolgung enger.
Folgen für künftige Meesmissionen
Für Betreiber von Flotten Unterwasserroboter lautet die zentrale Botschaft, dass sie nun Geschwindigkeit gegen Aufwand auf transparente Weise tauschen und vor allem garantieren können, wann die Roboter ihre Routen erreicht haben. Fordert eine Mission strikte Timing‑Vorgaben — etwa die Koordination mehrerer Fahrzeuge, die Inspektion eines bewegten Objekts oder das schnelle Ausweichen vor Gefahren — bietet der vordefinierte‑Zeit‑Regler präzise, einstellbare Konvergenz. Sind langfristige Sanftheit und minimierter Aktuatorverschleiß wichtiger als rohe Geschwindigkeit, haben traditionelle Methoden nach wie vor Vorteile. Indem diese Arbeit diese Kompromisse klar ausweist, schafft sie die Grundlage für vorhersagbarere, zuverlässigere und effizientere Führung von Unterwasserrobotern in realen Seegebieten.
Zitation: Keymasi-Khalaji, A., Tajpour-Fard, S. Predefined-time tracking control for underwater robots. Sci Rep 16, 10218 (2026). https://doi.org/10.1038/s41598-026-40596-2
Schlüsselwörter: Unterwasserroboter, Trajektorienverfolgung, zeitbegrenzte Regelung, Roboternavigation, autonome Systeme im Ozean