Clear Sky Science · ru
Управление слежением с заранее заданным временем для подводных роботов
Роботы по жесткому графику под водой
Автономные подводные аппараты — торпедоподобные роботы, патрулирующие океан — все чаще выполняют задачи вроде картирования дна, инспекции шельфовых сооружений и мониторинга морских экосистем. Многие такие миссии привязаны ко времени: несколько аппаратов должны встретиться в определенном месте и времени, просканировать район до прохода судна или лавировать в многолюдных водах. В этом исследовании предложен новый метод управления этими роботами, который гарантирует, что они займут заданную траекторию в точно указанное пользователем время, даже если течения сносят их с курса или поведение машины трудно точно смоделировать.
Почему время важно для подводных роботов
Традиционные методы наведения подводных аппаратов ориентированы на то, чтобы со временем сократить расхождение между текущим положением робота и требуемым. Широко используемый подход — скользящий режим (sliding‑mode control) — ценится за то, что удерживает аппарат на курсе даже при неточных моделях судна или среды. Но у него есть существенный недостаток для задач с ограничениями по времени: время выхода на желаемую траекторию зависит от начального отклонения и деталей движения, поэтому оператору трудно заранее оценить, сколько займет сходимость. Для операций, требующих точной синхронизации или строгих запасов безопасности, эта неопределенность может быть дорогостоящей или даже опасной.
Метод управления с встроенным дедлайном
Авторы разрабатывают стратегию управления с заранее заданным временем сходимости, которая прямо задает желаемый срок в законе управления. Вместо расплывчатых обещаний, что ошибки исчезнут «в конце концов», метод позволяет инженеру указать горизонт сходимости — например, несколько секунд для быстрого маневра или больше времени для более плавного отклика — и формирует управляющие сигналы так, чтобы ошибки по положению и скорости гарантированно стремились к нулю до наступления этого срока независимо от начального состояния робота. Это достигается с помощью двухслойной схемы: внешний слой вычисляет желаемые скорости в продольном и боковом направлениях робота в зависимости от расстояния до целевой траектории, а внутренний слой генерирует тягу, необходимую, чтобы реальные скорости соответствовали этим целям. Тщательно подобранные математические энергетические функции доказывают, что такая комбинация всегда выведет робот на траекторию в заданный срок.
Испытание метода
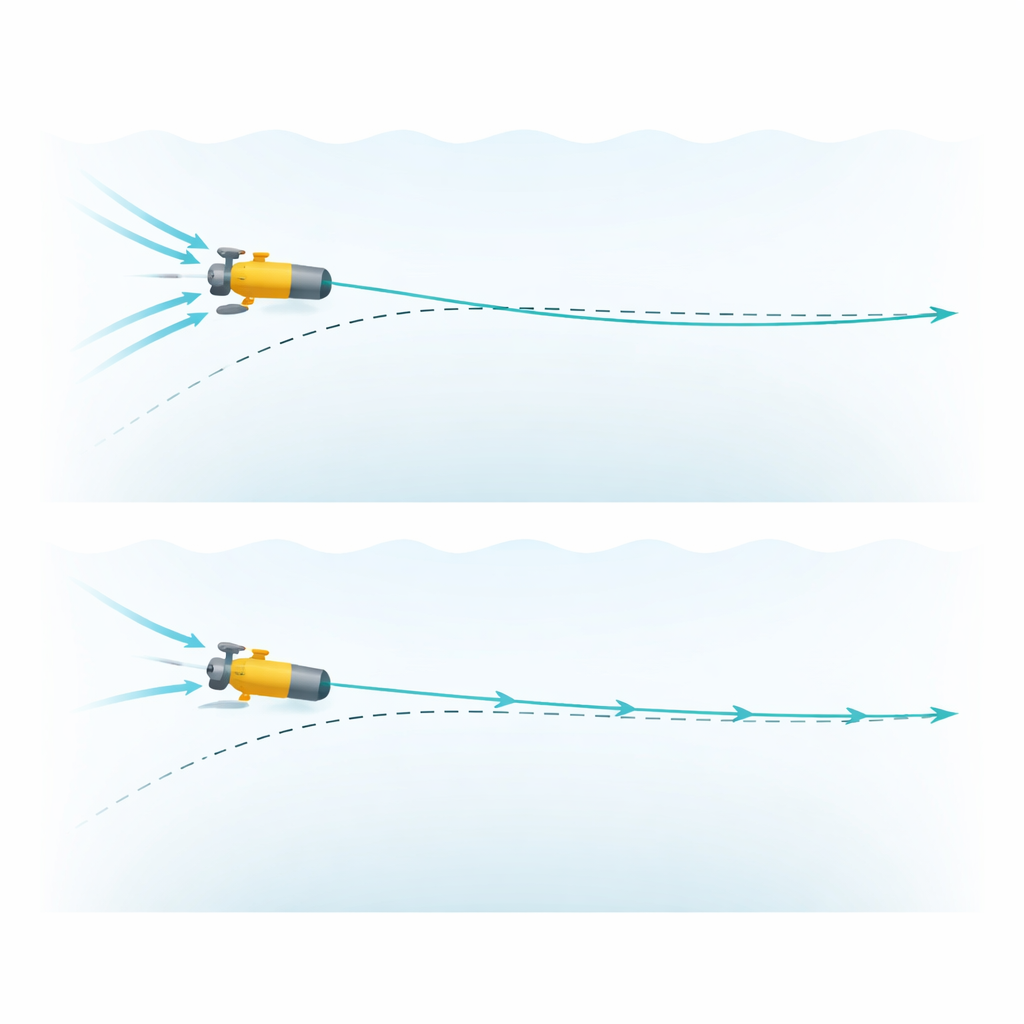
Чтобы сравнить гарантированное по времени управление с более привычным подходом, исследователи применяют оба к подробной компьютерной модели известного подводного аппарата REMUS‑100. В виртуальном эксперименте роботу предлагают отслеживать два типа траекторий в горизонтальной плоскости: плавную окружность и более требовательную «цветочную» петлю с меняющейся кривизной. Для нового контроллера попробованы разные времена сходимости — от очень коротких до более щадящих. Результаты показывают, что оба метода в конечном счете способны вести аппарат по заданным кривым, но контроллер с заранее заданным временем достигает траектории быстрее при коротком горизонте, тогда как более длинные горизонты дают более мягкое поведение.
Баланс между скоростью, расходом усилий и устойчивостью
Исследование идет дальше простого визуального сравнения траекторий. Оно подсчитывает, насколько аппарат отклоняется от желаемого пути во времени, какую тягу должны выдать двигатели, сколько механической энергии расходуется и насколько плавными становятся управляющие сигналы после выхода на траекторию. При очень коротком времени сходимости новый контроллер резко снижает ошибку слежения, но требует резких импульсов тяги и более энергозатратных маневров. По мере увеличения допустимого времени сходимости эти усилия и энергопотребление падают, а управляющие воздействия становятся не менее плавными — или даже плавнее — чем у скользящего режима, при этом точность слежения остается выше. Даже при сильных течениях, значительных изменениях параметров аппарата и зашумленных показаниях датчиков оба подхода демонстрируют устойчивость, но контроллер с заранее заданным временем обеспечивает более точное удержание траектории.
Что это значит для будущих морских миссий
Для операторов, планирующих флоты подводных роботов, главный вывод в том, что теперь можно прозрачно обменивать скорость на затраты и, что особенно важно, гарантировать момент выхода машин на маршрут. Если миссия требует строгой синхронизации — например, координации нескольких аппаратов, инспекции движущегося объекта или быстрого ухода от опасностей — контроллер с заранее заданным временем дает точную настраиваемую сходимость. Когда же важнее долговременная плавность и минимальный износ приводов, традиционные методы все еще имеют свои преимущества. Четко показывая эти компромиссы, работа закладывает основу для более предсказуемого, надежного и эффективного управления подводными роботами в реальных морских условиях.
Цитирование: Keymasi-Khalaji, A., Tajpour-Fard, S. Predefined-time tracking control for underwater robots. Sci Rep 16, 10218 (2026). https://doi.org/10.1038/s41598-026-40596-2
Ключевые слова: подводные роботы, слежение за траекторией, управление с ограничением по времени, навигация роботов, автономность в океане