Clear Sky Science · nl
Vooraf bepaalde-tijd volgregelgeving voor onderwaterrobots
Robots met een strakke planning onder de zee
Autonome onderwatervoertuigen — torpedovormige robots die de oceanen bevaren — krijgen steeds vaker taken zoals het in kaart brengen van de zeebodem, het inspecteren van offshore constructies en het monitoren van mariene ecosystemen. Veel van deze missies zijn tijdkritisch: meerdere voertuigen moeten op hetzelfde moment op dezelfde plek samenkomen, een gebied moet gescand worden voordat een schip passeert, of er moeten obstakels in druk water worden vermeden. Deze studie presenteert een nieuwe manier om zulke robots te sturen zodat ze gegarandeerd binnen een nauwkeurig, door de gebruiker gekozen tijdsbestek hun geplande pad bereiken, ook wanneer stromingen hen van koers duwen of hun precieze gedrag moeilijk te modelleren is.
Waarom timing belangrijk is voor oceaanrobots
Conventionele geleidingsmethoden voor onderwaterrobots richten zich op het uiteindelijk verkleinen van het verschil tussen waar de robot is en waar hij zou moeten zijn. Een veelgebruikte aanpak, sliding‑mode control, wordt gewaardeerd omdat hij de robot op koers houdt, zelfs wanneer het model van het voertuig of de oceaanomgeving onvolledig is. Maar voor tijdkritische missies heeft deze methode een belangrijk nadeel: de tijd die nodig is om op het gewenste pad te komen hangt af van hoe ver de robot aanvankelijk afwijkt en van details van de beweging, zodat bedieners vooraf niet gemakkelijk kunnen voorspellen hoe lang de convergentie duurt. Voor taken die precieze synchronisatie of strikte veiligheidsmarges vereisen, kan die onzekerheid kostbaar of zelfs gevaarlijk zijn.
Een stuurmethode met ingebouwde deadline
De auteurs ontwikkelen een predefined‑time stuurstrategie die de gewenste vestigingstijd in de stuurwet zelf verwerkt. In plaats van slechts te beloven dat fouten ‘uiteindelijk’ verdwijnen, stelt de methode een ingenieur in staat een convergentiehorizon op te geven — bijvoorbeeld enkele seconden voor een snelle manoeuvre of langer voor een rustiger reactie — en ontwerpt de regels zodat zowel positie‑ als snelheidsfouten gegarandeerd nul naderen vóór die deadline, ongeacht het begingetal van de robot. Dit wordt bereikt via een tweelaags schema: een buitenste laag berekent gewenste snelheden in voorwaartse en zijwaartse richting op basis van de afstand tot het doelpad, en een binnenste laag genereert de aandrijfkrachten die nodig zijn om de werkelijke snelheden op die doelen te brengen. Zorgvuldig gekozen mathematische energiefuncties bewijzen dat deze combinatie de robot altijd binnen de voorgeschreven tijd op zijn pad zal brengen.
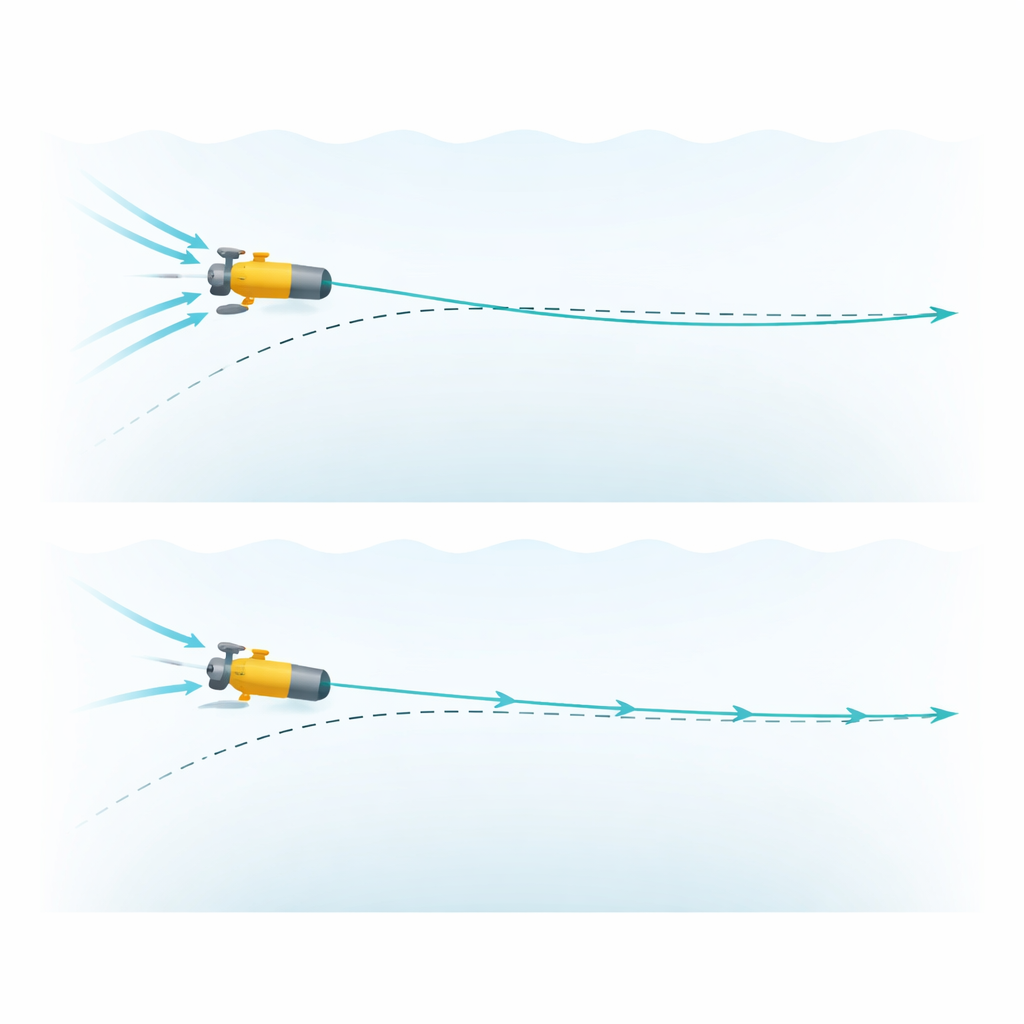
De methode op de proef gesteld
Om te zien hoe deze gegarandeerde‑tijdsturing zich verhoudt tot een bekendere aanpak passen de onderzoekers beide toe op een gedetailleerd computermodel van een bekend onderwatervoertuig genaamd REMUS‑100. Ze laten de virtuele robot twee soorten banen volgen in een horizontaal vlak: een vloeiende cirkel en een veeleisendere bloemvormige lus met wisselende kromming. Voor de nieuwe regelaar proberen ze meerdere convergentietijden, van zeer snel tot meer ontspannen. De resultaten tonen aan dat beide methoden de robot uiteindelijk langs de gevraagde krommen kunnen leiden, maar dat de predefined‑time regelaar het pad eerder bereikt wanneer zijn tijdhorizon kort is, terwijl langere horizonnen voor zachtere beweging zorgen.
Balanceren van snelheid, inspanning en stabiliteit
De studie gaat verder dan eenvoudige visuele inspecties van paden. Er wordt bijgehouden hoe ver de robot in de loop van de tijd van het gewenste traject afwijkt, hoeveel kracht de voortstuwers moeten leveren, hoeveel mechanische energie er wordt verbruikt en hoe glad de krachtcommando’s zijn zodra de robot is ingeregeld. Wanneer de convergentietijd zeer kort wordt gekozen, vermindert de nieuwe regelaar de volgfout sterk maar vraagt hij scherpe krachtpieken en energievere manoeuvres. Naarmate de toegestane convergentietijd langer wordt, nemen deze krachten en het bijbehorende energieverbruik af en worden de stuuracties net zo vloeiend — of vloeiender — dan die van sliding‑mode control, terwijl de robot toch dichter bij zijn pad blijft. Zelfs wanneer de onderzoekers sterke stromingen, grote veranderingen in voertuigparameters en ruis in sensormetingen simuleren, blijven beide benaderingen robuust, maar de predefined‑time regelaar behoudt strakkere trajectvolging.
Wat dit betekent voor toekomstige oceaanmissies
Voor operators die vloten onderwaterrobots plannen is de belangrijkste boodschap dat ze nu op transparante wijze snelheid tegen inspanning kunnen afwegen en, belangrijker nog, kunnen garanderen wanneer de robots op hun routes zijn ingeregeld. Als een missie strikte timing vereist — zoals het coördineren van meerdere voertuigen, het inspecteren van een bewegend object of het snel uitwijken voor gevaar — biedt de predefined‑time regelaar precieze, instelbare convergentie. Wanneer op de lange termijn gladheid en minimaal slijt aan actuatoren belangrijker zijn dan pure snelheid, hebben meer traditionele methoden nog steeds hun voordelen. Door deze afwegingen duidelijk in kaart te brengen, vormt dit werk een basis voor voorspelbaardere, betrouwbaardere en efficiëntere geleiding van onderwaterrobots in de echte oceaanomgeving.
Bronvermelding: Keymasi-Khalaji, A., Tajpour-Fard, S. Predefined-time tracking control for underwater robots. Sci Rep 16, 10218 (2026). https://doi.org/10.1038/s41598-026-40596-2
Trefwoorden: onderwaterrobots, trajectvolging, tijdgebonden besturing, robotnavigatie, oceaanautonomie