Clear Sky Science · sv
Fördefinierad-tids spårningsstyrning för undervattensrobotar
Robotar med tajt tidtabell under ytan
Autonoma undervattensfarkoster — torpedformade robotar som färdas i haven — anförtros i allt större utsträckning uppgifter som kartläggning av havsbotten, inspektion av offshore‑anläggningar och övervakning av marina ekosystem. Många av dessa uppdrag är tidskritiska: flera farkoster måste mötas på samma plats och tid, scanna ett område innan ett fartyg passerar eller undvika hinder i trånga vatten. Denna studie presenterar ett nytt sätt att styra sådana robotar så att man kan garantera att de låser sig på sin planerade bana inom en exakt, användarvald tid, även när strömmar skjuter dem ur kurs eller deras exakta beteende är svårt att modellera.
Varför tidpunkt är viktig för oceanrobotar
Konventionella vägledningsmetoder för undervattensrobotar fokuserar på att så småningom reducera skillnaden mellan var roboten är och var den bör vara. En ofta använd metod, kallad sliding‑mode‑styrning, uppskattas eftersom den håller roboten på banan även när modellen för farkosten eller havsmiljön är ofullständig. Men den har en viktig nackdel för tidskänsliga uppdrag: den tid som krävs för att stabilisera sig på önskad bana beror på hur långt felstarten är samt på rörelsedetaljer, så operatörer kan inte enkelt veta i förväg hur länge konvergensen tar. För uppgifter som kräver exakt synkronisering eller strikt säkerhetsmarginal kan denna osäkerhet vara kostsam eller till och med farlig.
En styrmetod med inbyggd deadline
Författarna utvecklar en fördefinierad‑tidsstyrstrategi som bygger in den önskade stabiliseringstiden i styrlagen. Istället för att bara lova att felen så småningom försvinner, låter metoden ingenjören ange en konvergenshorisont — till exempel några sekunder för en snabb manöver eller längre för en mjukare respons — och utformar styrsignalerna så att både positions‑ och hastighetsfel garanterat närmar sig noll före den deadlinen, oavsett robotens startpunkt. Detta uppnås genom ett tvåskiktschema: ett yttre skikt beräknar önskade hastigheter i robotens fram‑ och sidled baserat på hur långt den är från målbanan, och ett inre skikt genererar drivkrafterna som krävs för att de verkliga hastigheterna ska matcha dessa mål. Noga utvalda matematiska energi‑funktioner visar att denna kombination alltid kommer att dra roboten till sin bana inom den föreskrivna tiden.
Sätta metoden på prov
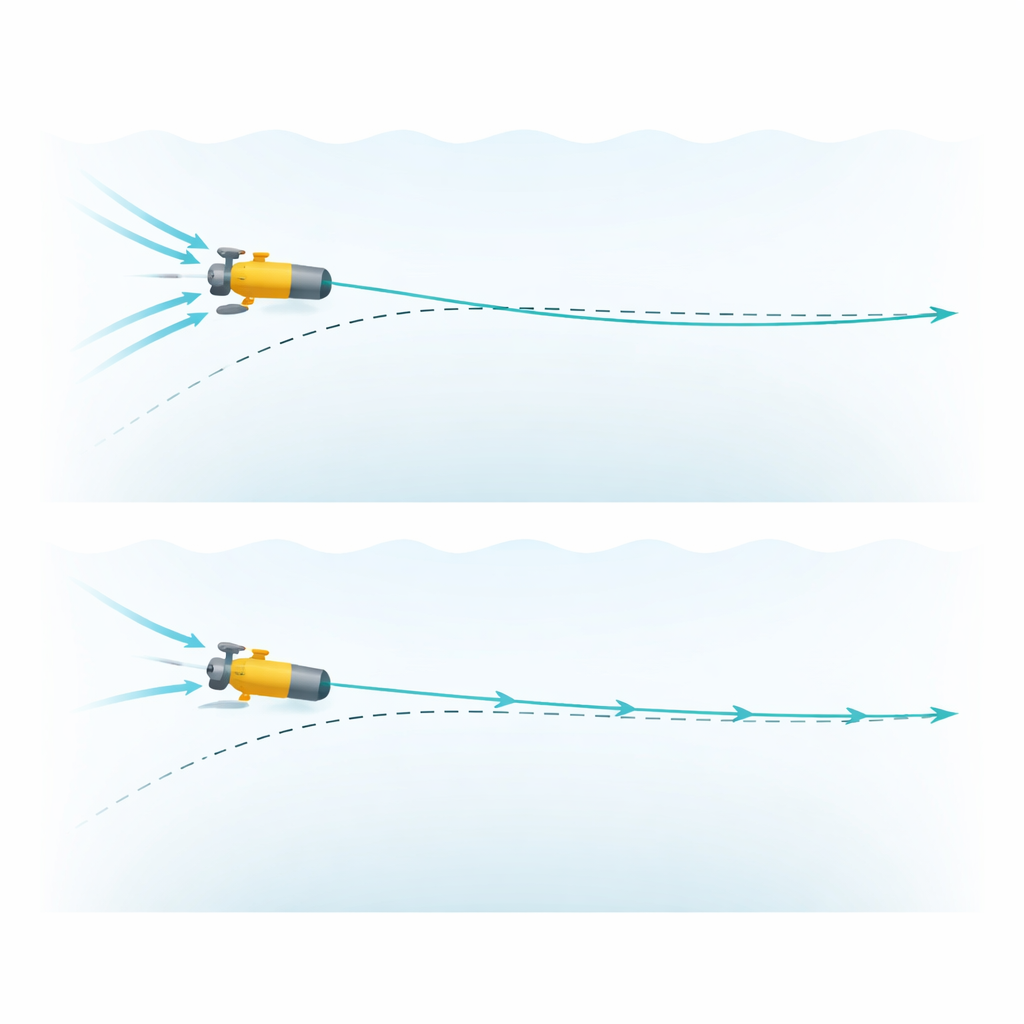
För att se hur denna garanterade‑tidsstyrning står sig mot en mer bekant metod tillämpar forskarna båda på en detaljerad datormodell av ett välkänt undervattensfordon kallat REMUS‑100. De ber den virtuella roboten följa två sorters banor i ett horisontellt plan: en jämn cirkel och en mer krävande blomformad slinga med varierande kurvatur. För den nya styrenheten provar de flera konvergenstider, från mycket snabba till mer avslappnade. Resultaten visar att båda metoderna så småningom kan leda roboten längs de begärda kurvorna, men den fördefinierade‑tidsstyraren når banan snabbare när dess tids‑horisont är kort, medan längre horisonter ger mjukare rörelser.
Balansera hastighet, insats och stabilitet
Studien går längre än enkla visuella jämförelser av banor. Den räknar hur långt roboten avviker från den önskade banan över tid, hur mycket kraft thrustrarna måste generera, hur mycket mekanisk energi som förbrukas och hur jämna kraftkommandon är när roboten har stabiliserat sig. När konvergenstiden väljs mycket kort minskar den nya styrenheten spårningsfelet kraftigt men kräver hårda kraftutbrott och mer energikrävande manövrer. När den tillåtna konvergenstiden förlängs minskar dessa krafter och den associerade energianvändningen, och styrinsatserna blir lika jämna — eller jämnare — än sliding‑mode‑styrning samtidigt som roboten hålls närmare sin bana. Även när forskarna inför starka strömmar, stora ändringar i fordonsparametrar och brusiga sensormätningar förblir båda angreppssätten robusta, men den fördefinierade‑tidsstyraren bibehåller tajtare spårning.
Vad detta betyder för framtida havsuppdrag
För operatörer som planerar flottor av undervattensrobotar är huvudbudskapet att de nu kan avväga hastighet mot ansträngning på ett transparent sätt och, viktigast, garantera när robotarna kommer att lägga sig på sina rutter. Om ett uppdrag kräver strikt timing — som att koordinera flera farkoster, inspektera ett rörligt objekt eller snabbt styra undan från faror — erbjuder den fördefinierade‑tidsstyraren precis, justerbar konvergens. När långsiktig mjukhet och minimal slitage på aktuatorer är viktigare än rå hastighet har mer traditionella metoder fortfarande fördelar. Genom att tydligt kartlägga dessa avvägningar lägger detta arbete grunden för mer förutsägbar, pålitlig och effektiv vägledning av undervattensrobotar i verkliga hav.
Citering: Keymasi-Khalaji, A., Tajpour-Fard, S. Predefined-time tracking control for underwater robots. Sci Rep 16, 10218 (2026). https://doi.org/10.1038/s41598-026-40596-2
Nyckelord: undervattensrobotar, banföljning, tidsbegränsad styrning, robotnavigering, oceanautonomi