Clear Sky Science · fr
Contrôle de trajectoire à temps prédéfini pour robots sous‑marins
Robots sous‑marins à l’heure
Les véhicules autonomes sous‑marins — des robots en forme de torpille qui parcourent les océans — sont de plus en plus sollicités pour des tâches comme la cartographie du fond marin, l’inspection d’ouvrages offshore et la surveillance des écosystèmes marins. Nombre de ces missions sont soumises à des contraintes temporelles : plusieurs véhicules doivent se retrouver au même endroit et au même moment, scanner une zone avant le passage d’un navire, ou éviter des obstacles dans des eaux encombrées. Cette étude présente une nouvelle manière de piloter ces robots afin de garantir qu’ils rejoignent leur trajectoire prévue dans un délai précis choisi par l’utilisateur, même lorsque les courants les dévient ou que leur comportement exact est difficile à modéliser.
Pourquoi le facteur temps compte pour les robots océaniques
Les méthodes classiques de guidage pour robots sous‑marins visent généralement à réduire à terme l’écart entre la position réelle du robot et la position souhaitée. Une approche largement utilisée, appelée contrôle en mode glissant, est prisée parce qu’elle maintient le robot sur sa trajectoire même quand le modèle du véhicule ou de l’environnement marin est imparfait. Mais elle présente un inconvénient majeur pour les missions sensibles au temps : le temps nécessaire pour atteindre la trajectoire dépend de l’écart initial et des détails du mouvement, si bien que les opérateurs ne peuvent pas facilement prévoir combien de temps prendra la convergence. Pour des tâches exigeant une synchronisation précise ou des marges de sécurité strictes, cette incertitude peut être coûteuse voire dangereuse.
Une méthode de pilotage avec une échéance intégrée
Les auteurs développent une stratégie de contrôle à temps prédéfini qui intègre l’horizon de convergence désiré directement dans la loi de commande. Plutôt que de promettre simplement que les erreurs disparaîtront « finalement », la méthode permet à l’ingénieur de spécifier un horizon de convergence — quelques secondes pour une manœuvre rapide ou plus longtemps pour une réponse plus douce — et conçoit les signaux de commande de sorte que les erreurs de position et de vitesse tendent vers zéro avant cette échéance, quel que soit le point de départ du robot. Cela s’obtient via un schéma à deux couches : une couche extérieure calcule les vitesses souhaitées dans les directions avant et latérale du robot en fonction de son éloignement par rapport à la trajectoire cible, et une couche intérieure génère les forces propulsives nécessaires pour faire correspondre les vitesses réelles à ces consignes. Des fonctions d’énergie mathématiques soigneusement choisies prouvent que cette combinaison ramènera toujours le robot sur sa trajectoire dans le délai prescrit.
Mise à l’épreuve de la méthode
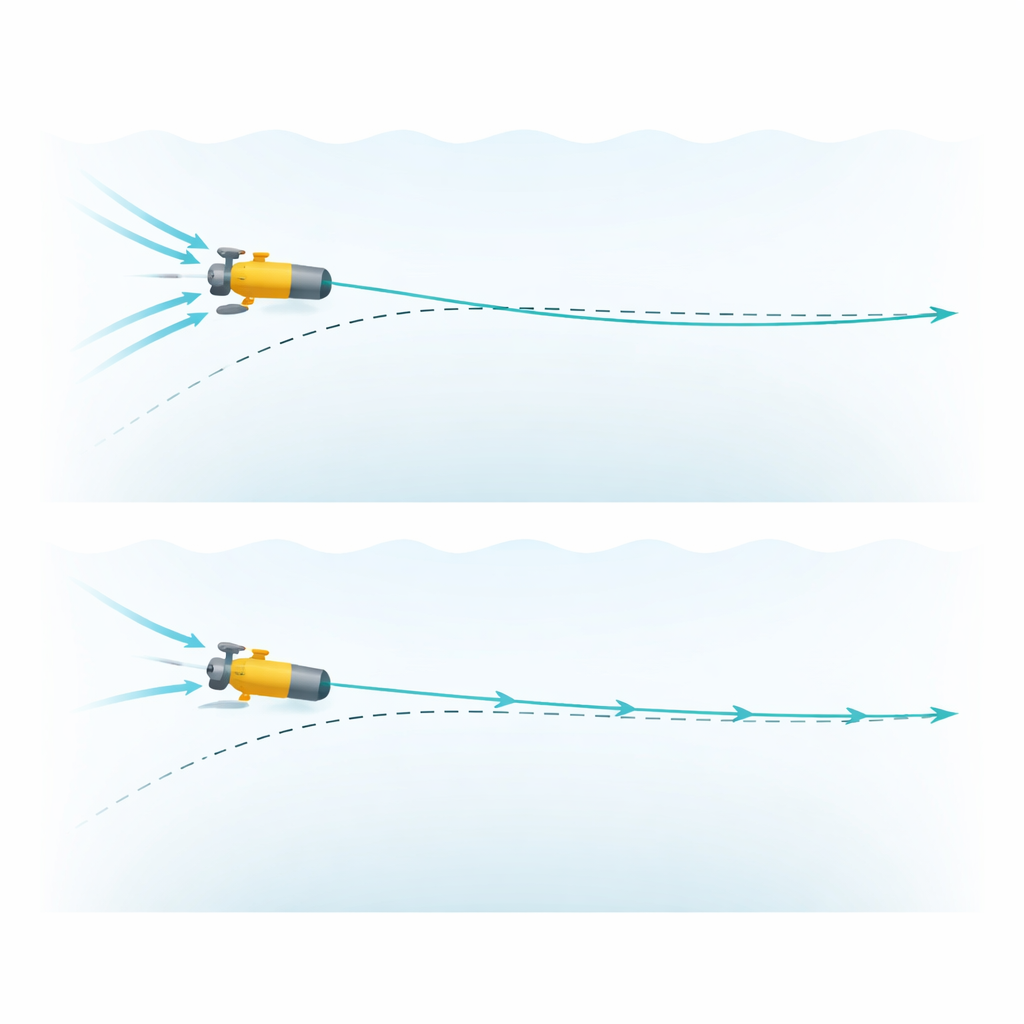
Pour comparer ce pilotage à temps garanti à une approche plus familière, les chercheurs appliquent les deux contrôleurs à un modèle informatique détaillé d’un véhicule sous‑marin bien connu, le REMUS‑100. Ils demandent au robot virtuel de suivre deux types de trajectoires dans un plan horizontal : un cercle régulier et une boucle en forme de fleur plus exigeante, à courbure variable. Pour le nouveau contrôleur, ils testent plusieurs temps de convergence, du très rapide au plus détendu. Les résultats montrent que les deux méthodes peuvent finalement guider le robot le long des courbes demandées, mais que le contrôleur à temps prédéfini atteint la trajectoire plus tôt lorsque son horizon temporel est court, tandis que des horizons plus longs produisent des mouvements plus doux.
Concilier vitesse, effort et stabilité
L’étude va au‑delà d’une simple inspection visuelle des trajectoires. Elle mesure l’écart du robot par rapport à la voie souhaitée au fil du temps, la force que doivent fournir les propulseurs, l’énergie mécanique consommée et la douceur des commandes de force une fois le robot stabilisé. Lorsque le temps de convergence choisi est très court, le nouveau contrôleur réduit fortement l’erreur de suivi mais exige des impulsions de force prononcées et des manœuvres plus énergivores. À mesure que le temps de convergence autorisé augmente, ces forces et la consommation d’énergie associée diminuent, et les actions de commande deviennent aussi lisses — voire plus — que celles du contrôle en mode glissant tout en maintenant le robot plus près de sa trajectoire. Même lorsque les chercheurs introduisent des courants puissants, de grandes variations des paramètres du véhicule et des mesures capteurs bruitées, les deux approches restent robustes, mais le contrôleur à temps prédéfini conserve un suivi plus serré.
Ce que cela implique pour les futures missions océaniques
Pour les opérateurs planifiant des flottes de robots sous‑marins, le message clé est qu’ils peuvent désormais échanger vitesse contre effort de manière transparente et, surtout, garantir le moment où les robots se placeront sur leurs routes. Si une mission exige une synchronisation stricte — comme la coordination de plusieurs véhicules, l’inspection d’un objet en mouvement ou l’éloignement rapide d’un danger — le contrôleur à temps prédéfini offre une convergence précise et réglable. Lorsque la douceur à long terme et la minimisation de l’usure des actionneurs priment sur la rapidité pure, les méthodes plus traditionnelles conservent des avantages. En cartographiant clairement ces compromis, ce travail jette les bases d’un guidage de robots sous‑marins plus prévisible, fiable et efficace en conditions réelles en mer.
Citation: Keymasi-Khalaji, A., Tajpour-Fard, S. Predefined-time tracking control for underwater robots. Sci Rep 16, 10218 (2026). https://doi.org/10.1038/s41598-026-40596-2
Mots-clés: robots sous‑marins, suivi de trajectoire, contrôle à durée limitée, navigation robotique, autonomie océanique