Clear Sky Science · es
Control de seguimiento en tiempo predefinido para robots submarinos
Robots con un plazo apretado bajo el mar
Los vehículos autónomos submarinos —robots con forma de torpedo que recorren los océanos— reciben cada vez más misiones como cartografiar el lecho marino, inspeccionar infraestructuras marinas y vigilar ecosistemas. Muchas de estas tareas están condicionadas por el tiempo: varios vehículos deben reunirse en un lugar y momento concretos, escanear una zona antes de que pase un barco o evitar obstáculos en aguas concurridas. Este estudio presenta una nueva manera de gobernar esos robots de forma que se garantice que alcanzarán su ruta prevista dentro de un intervalo preciso elegido por el usuario, incluso cuando las corrientes los desvían o su comportamiento exacto es difícil de modelar.
Por qué el tiempo importa para los robots oceánicos
Los métodos de guiado convencionales para robots submarinos se centran en reducir eventualmente la diferencia entre la posición real del robot y la deseada. Un enfoque ampliamente usado, llamado control por modo deslizante, es valorado porque mantiene al robot en la senda incluso cuando el modelo del vehículo o del entorno oceánico es imperfecto. Pero tiene un inconveniente clave para misiones críticas en tiempo: el tiempo que tarda en asentarse sobre la trayectoria deseada depende de cuánto se desvía el robot al inicio y de detalles del movimiento, por lo que los operadores no pueden saber fácilmente de antemano cuánto durará la convergencia. Para tareas que requieren sincronización precisa o márgenes de seguridad estrictos, esta incertidumbre puede ser costosa o incluso peligrosa.
Un método de guiado con fecha límite incorporada
Los autores desarrollan una estrategia de control en tiempo predefinido que incorpora el tiempo de asentamiento deseado directamente en la ley de control. En lugar de limitarse a prometer que los errores desaparecerán “eventualmente”, el método permite a un ingeniero especificar un horizonte de convergencia —por ejemplo, unos segundos para una maniobra rápida o más tiempo para una respuesta más suave— y diseña las señales de control de modo que tanto los errores de posición como de velocidad estén garantizados a aproximarse a cero antes de ese plazo, independientemente del punto de partida del robot. Esto se logra mediante un esquema de dos capas: una capa exterior calcula las velocidades deseadas en las direcciones longitudinal y lateral del robot en función de cuánto se aleja de la trayectoria objetivo, y una capa interior genera las fuerzas propulsoras necesarias para que las velocidades reales coincidan con esas metas. Funciones de energía matemática escogidas cuidadosamente prueban que esta combinación conducirá siempre al robot a su trayectoria dentro del tiempo prescrito.
Poniendo el método a prueba
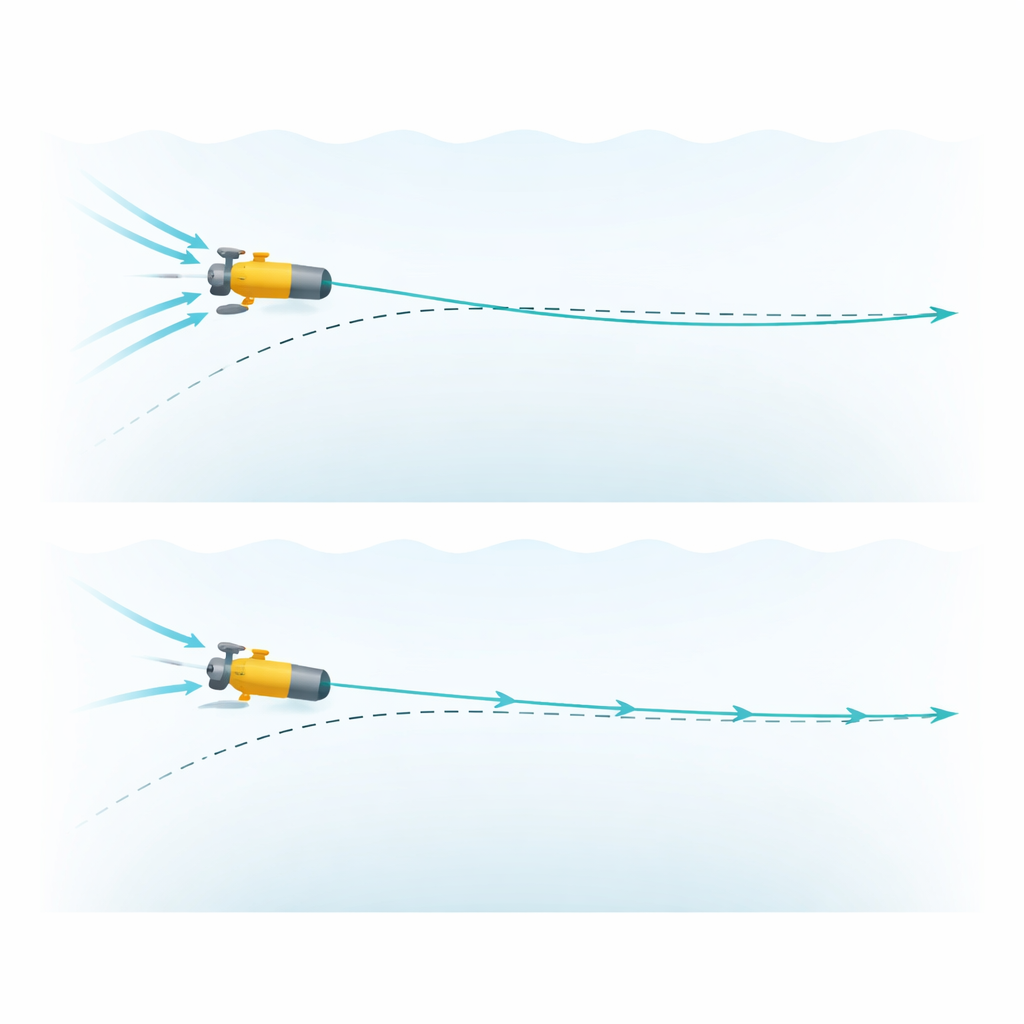
Para comparar este guiado con tiempo garantizado con un enfoque más familiar, los investigadores aplican ambos a un modelo por ordenador detallado de un conocido vehículo submarino llamado REMUS‑100. Piden al robot virtual que siga dos tipos de trayectorias en un plano horizontal: un círculo suave y un lazo en forma de flor más exigente con curvatura variable. Para el nuevo controlador prueban varios tiempos de convergencia, desde muy rápidos hasta más relajados. Los resultados muestran que ambos métodos pueden eventualmente guiar al robot a lo largo de las curvas solicitadas, pero el controlador en tiempo predefinido alcanza la trayectoria antes cuando su horizonte temporal es corto, mientras que horizontes más largos producen un movimiento más suave.
Equilibrando velocidad, esfuerzo y estabilidad
El estudio va más allá de simples inspecciones visuales de las trayectorias. Calcula cuánto se desvía el robot de la ruta deseada a lo largo del tiempo, cuánta fuerza deben generar los propulsores, cuánta energía mecánica se gasta y cuán suaves son las órdenes de fuerza una vez que el robot se ha asentado. Cuando el tiempo de convergencia se elige muy corto, el nuevo controlador reduce drásticamente el error de seguimiento pero exige ráfagas de fuerza intensas y maniobras más enérgicas. A medida que se alarga el tiempo permitido de convergencia, estas fuerzas y el consumo de energía asociado disminuyen, y las acciones de control se vuelven tan suaves —o más— que las del control por modo deslizante, manteniendo al robot más cerca de su ruta. Incluso cuando los investigadores introducen corrientes fuertes, grandes cambios en los parámetros del vehículo y lecturas de sensores ruidosas, ambos enfoques siguen siendo robustos, pero el controlador en tiempo predefinido mantiene un seguimiento más ajustado.
Qué implica esto para futuras misiones oceánicas
Para los operadores que planifican flotas de robots submarinos, el mensaje clave es que ahora pueden intercambiar velocidad por esfuerzo de forma transparente y, lo que es crucial, garantizar cuándo los robots se fijarán en sus rutas. Si una misión exige sincronización estricta —como coordinar varios vehículos, inspeccionar un objeto en movimiento o alejarse rápidamente de peligros—, el controlador en tiempo predefinido ofrece una convergencia precisa y ajustable. Cuando la suavidad a largo plazo y el menor desgaste de los actuadores son más importantes que la velocidad bruta, los métodos tradicionales aún conservan ventajas. Al trazar claramente estos compromisos, este trabajo sienta las bases para una guía de robots submarinos más predecible, fiable y eficiente en mares reales.
Cita: Keymasi-Khalaji, A., Tajpour-Fard, S. Predefined-time tracking control for underwater robots. Sci Rep 16, 10218 (2026). https://doi.org/10.1038/s41598-026-40596-2
Palabras clave: robots submarinos, seguimiento de trayectoria, control acotado en el tiempo, navegación robótica, autonomía oceánica