Clear Sky Science · he
בקרה למעקב בזמן קבוע לרובוטים תת-מימיים
רובוטים עם לו״ז צפוף מתחת למים
כלי רכב תת-מימיים אוטונומיים — רובוטים בצורת טורפדו הנעים באוקיינוסים — זוכים לאמון גובר במשימות כמו מיפוי קרקעית הים, בדיקה של מתקנים ימיים ופיקוח על מערכות אקולוגיות ימיות. רבות מהמשימות הללו תלויות בזמן: מספר כלי רכב צריכים להיפגש במקום ובשעה מסוימים, לסרוק אזור לפני מעבר ספינה, או להימנע ממכשולים במים צפופים. המחקר הזה מציג שיטה חדשה להנעת רובוטים אלה כך שניתן להבטיח שיתייצבו על המסלול המתוכנן בתוך פרק זמן מדויק שבחר המשתמש, גם כשהזרמים מסטים אותם מהמסלול או כשהתנהגותם קשה לדימוי מדויק.
מדוע הזמן חשוב לרובוטים ימיים
שיטות הניווט המקובלות לרובוטים תת-מימיים מתמקדות בהקטנת הפער בין מיקום הרובוט לבין המיקום הרצוי בסופו של דבר. גישה נפוצה, הנקראת בקרה במצב מחליק (sliding-mode control), מוערכת כי היא שומרת על עקביות גם כאשר המודל של הכלי או של סביבת הים לקוי. אך יש לה חסרון מרכזי במשימות קריטיות לזמן: משך הזמן הדרוש כדי להתייצב על המסלול תלוי במידה שבה הרובוט החל מוטה ובפרטי התנועה, כך שמפעילים אינם יכולים לדעת בקלות מראש כמה זמן ההסתגלות תימשך. למשימות שמחייבות סינכרון מדויק או שוליים בטיחותיים נוקשים, אי-ודאות זו עלולה להיות יקרה ואף מסוכנת.
שיטת נהיגה עם מועד סיום מובנה
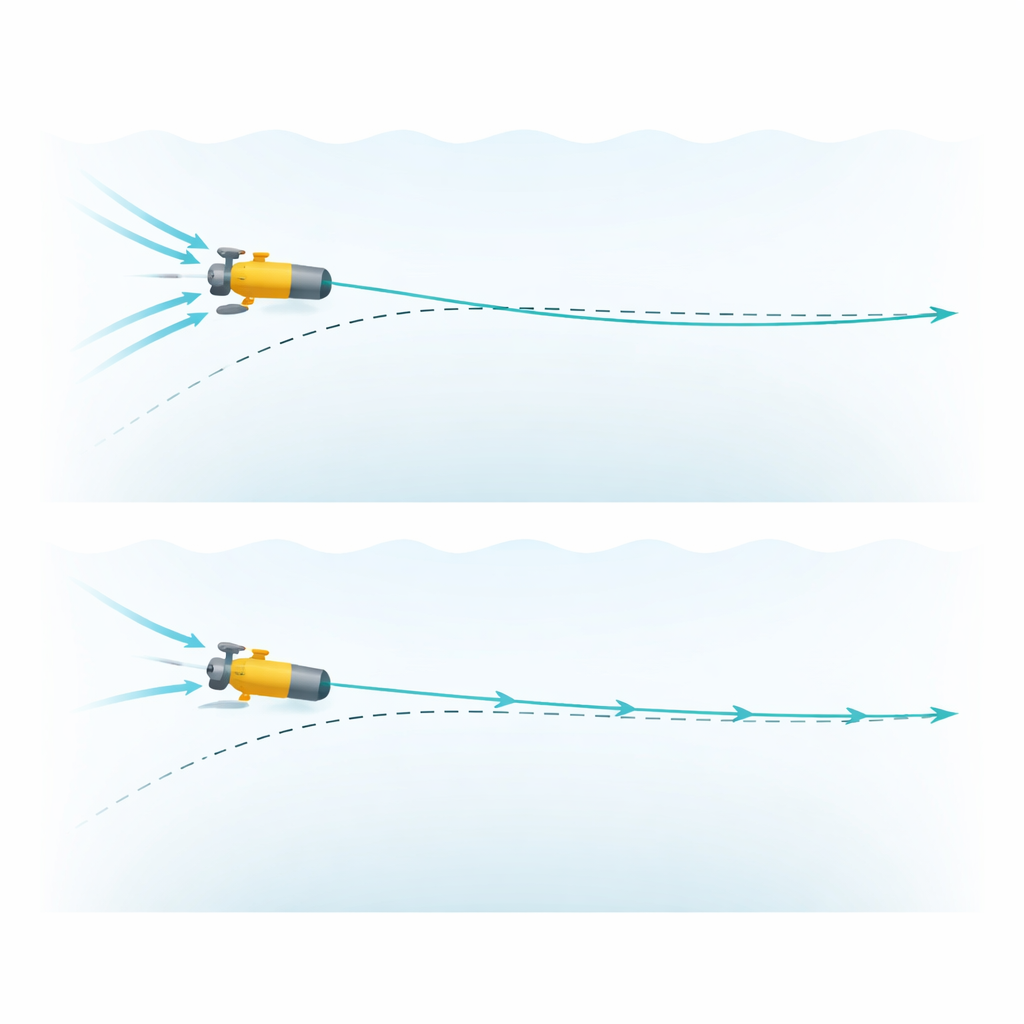
המחברים מפתחים אסטרטגיית בקרה מראש-זמנית (predefined-time) ששוזפת את זמן ההתייצבות הרצוי לתוך חוק ההתנהגות עצמו. במקום הבטחה שהשגיאות ייעלמו "בסופו של דבר", השיטה מאפשרת למהנדס להגדיר אופק התכנסות — למשל כמה שניות לתמרון מהיר או יותר זמן לתגובה עדינה — ומעצבת את אותות הבקרה כך ששגיאות מיקום ומהירות יגיעו לאפס לפני מועד זה, ללא תלות בנקודת ההתחלה של הרובוט. זה מושג באמצעות תכנון בשני שכבות: שכבה חיצונית מחשבת מהירויות רצויות בכיוון קדימה ובכיוון הצידי על סמך המרחק מהמסלול המטרה, ושכבה פנימית מפיקה את הכוחות ההנעתיים הנדרשים כדי לגרום למהירויות הממשיות להתאים ליעדים אלה. פונקציות אנרגיה מתמטיות שנבחרו בקפידה מוכיחות כי השילוב הזה תמיד ימשוך את הרובוט למסלולו בתוך הזמן שנקבע.
בדיקת השיטה במבחן
כדי להשוות בין ההיגוי המובטח-זמן לגישה מוכרת יותר, החוקרים מיישמים את שתיהן על מודל ממוחשב מפורט של כלי תת-מימי ידוע בשם REMUS-100. הם דורשים מהרובוט הווירטואלי לעקוב אחר שני סוגי מסלולים במישור אופקי: עיגול חלק ולולאה בצורת פרח שהיא מאתגרת יותר עם קמירות משתנה. עבור הבקר החדש הם בוחנים מספר זמנים להתכנסות, מהר מאוד ועד רגוע יותר. התוצאות מראות ששתי השיטות יכולות בסופו של דבר להנחות את הרובוט לאורך העקומות המבוקשות, אך הבקר מראש-זמני מגיע למסלול מוקדם יותר כאשר אופק הזמן קצר, בעוד שאופקי זמן ארוכים יותר מניבים תנועה רכה יותר.
איזון בין מהירות, מאמץ ויציבות
המחקר חורג מבדיקות חזותיות פשוטות של מסלולים. הוא סופר כמה הרובוט סוטה מהמאמר הנדרש לאורך זמן, כמה כוח מנועים נדרש, כמה אנרגיה מכנית מושקעת וכמה חלקים פקודות הכוח חלקות ברגע שהרובוט התייצב. כאשר זמן ההתכנסות נבחר כקצר מאוד, הבקר החדש מקטין באופן משמעותי את שגיאת המעקב אך דורש שינקי כוח חדים ומניפולציות אנרגטיות יותר. ככל שמותירנים זמן התכנסות ארוכים יותר, כוחות אלה ושימוש האנרגיה הקשור יורדים, ופעולות הבקרה נעשות חלקות כמו — או חלקות יותר — מאלו של בקרה במצב מחליק, תוך שמירה על קרבה טובה יותר למסלול. אפילו כאשר החוקרים מזריקים זרמים חזקים, שינויים גדולים בפרמטרי הכלי וקריאות חיישנים רועשות, שתי הגישות נשארות חסינות, אך הבקר מראש-זמני שומר על מעקב הדוק יותר.
מה משמעות הדבר למשימות ימיות עתידיות
עבור מפעילים שמתכננים צי של רובוטים תת-מימיים, המסר המרכזי הוא שהם יכולים כעת להחליף בין מהירות למאמץ באופן שקוף ובעל חשיבות גבוהה — להבטיח מתי הרובוטים יתייצבו על הנתיבים שלהם. אם המשימה מחייבת תזמון קפדני — כגון תיאום מספר כלי רכב, בדיקה של עצם נייד או הימנעות מהירה מסכנות — הבקר מראש-זמני מציע התכנסות מדויקת וניתנת לכוונון. כאשר חלקות לטווח הארוך ושחיקה מינימלית של המשאבים חשובות יותר מהמהירות הגולמית, שיטות מסורתיות עדיין מציגות יתרונות. על ידי מיפוי ברור של פשרות אלה, עבודה זו מניחה את התשתית להנחיה צפויה, אמינה ויעילה יותר של רובוטים תת-מימיים בימים האמיתיים.
ציטוט: Keymasi-Khalaji, A., Tajpour-Fard, S. Predefined-time tracking control for underwater robots. Sci Rep 16, 10218 (2026). https://doi.org/10.1038/s41598-026-40596-2
מילות מפתח: רובוטים תת-מימיים, מעקב מסלולים, בקרה עם גבול זמן, ניווט רובוטי, אוטונומיה ימית