Clear Sky Science · ar
التحكم بالتتبع بزمن محدد مسبقًا للروبوتات تحت الماء
روبوتات تعمل وفق جدول زمني صارم تحت سطح البحر
تزداد الثقة في المركبات الذاتية تحت الماء — روبوتات على شكل طوربيد تجوب المحيطات — للقيام بمهام مثل رسم خرائط قاع البحر، فحص منشآت البحرية، ومراقبة الأنظمة البيئية البحرية. العديد من هذه المهام مرتبطة بالزمن: يجب أن تلتقي مركبات متعددة في مكان وزمن محددين، أو تمسح منطقة قبل مرور سفينة، أو تتجنب عقبات في مياه مزدحمة. تعرض هذه الدراسة طريقة جديدة لتوجيه مثل هذه الروبوتات بحيث يمكن ضمان التقيد بمسارها المخطط خلال زمن دقيق اختاره المستخدم، حتى عندما تدفعها التيارات عن مسارها أو عندما يكون من الصعب نمذجة سلوكها بدقة.
لماذا التوقيت مهم لروبوتات المحيط
تركز طرق الإرشاد التقليدية للروبوتات تحت الماء على تقليص الفجوة بين موقع الروبوت والمكان الذي ينبغي أن يكون فيه بمرور الوقت. نهج شائع يُدعى التحكم بنمط الانزلاق يحظى بتقدير لأنه يحافظ على الروبوت على المسار حتى عندما يكون نموذج المركبة أو بيئة المحيط غير مثالي. لكنه يعاني من عيب رئيسي لمهام ذات حساسية زمنية: الزمن اللازم للاستقرار على المسار المرغوب يعتمد على مدى انحراف نقطة البداية وتفاصيل الحركة، لذا لا يستطيع المشغلون معرفة مسبقًا بسهولة المدة التي ستستغرقها عملية التقارب. بالنسبة للمهام التي تتطلب تزامنًا دقيقًا أو هوامش أمان صارمة، قد تكون هذه الشكوك مكلفة أو حتى خطيرة.
طريقة توجيه تتضمن موعدًا نهائيًا مدمجًا
طور المؤلفون استراتيجية تحكم بزمن محدد مسبقًا تدمج زمن الاستقرار المطلوب داخل قانون التوجيه نفسه. بدلًا من الاكتفاء بالوعد بأن الأخطاء ستختفي «في النهاية»، تتيح الطريقة للمهندس تحديد أفق تقارب — على سبيل المثال بضع ثوانٍ لمناورة سريعة أو أطول لاستجابة أخف — وتصمم إشارات التحكم بحيث تضمن اقتراب أخطاء الموضع والسرعة إلى الصفر قبل هذا الموعد النهائي، بغض النظر عن نقطة بداية الروبوت. يتحقق ذلك عبر مخطط ذو طبقتين: طبقة خارجية تحسب السرعات المطلوبة في اتجاهي تقدم الروبوت وجانبه اعتمادًا على مدى ابتعاده عن المسار المستهدف، وطبقة داخلية تولد القوى الدفعية اللازمة لجعل السرعات الحقيقية تطابق تلك الأهداف. توضح دوال طاقة رياضية مختارة بعناية أن هذا المزيج سيجذب الروبوت دائمًا إلى مساره ضمن الزمن المحدد.
تجريب الطريقة
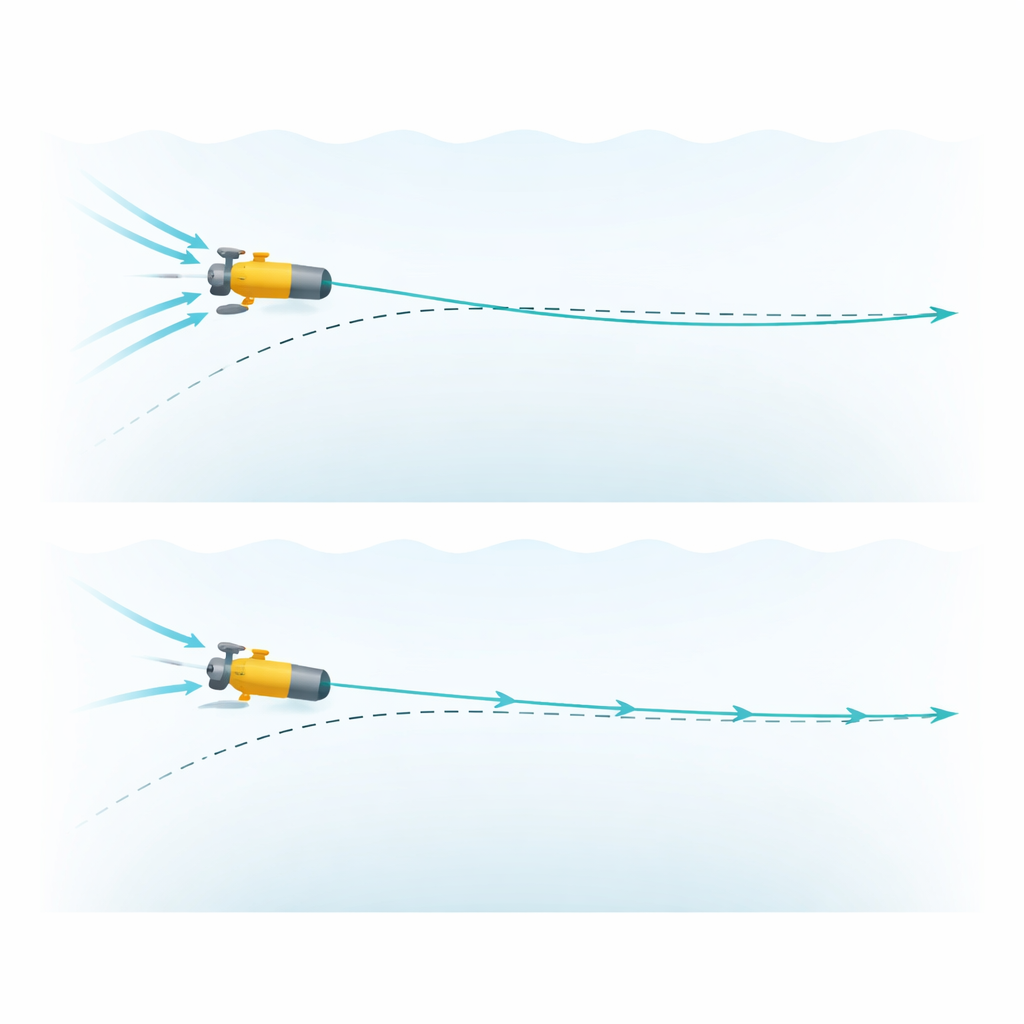
لمقارنة هذا التوجيه بالزمن المضمون مع نهج أكثر شيوعًا، طبق الباحثون كلا الطريقتين على نموذج حاسوبي مفصل لمركبة تحت الماء معروفة باسم REMUS‑100. طلبوا من الروبوت الافتراضي تتبع نوعين من المسارات في مستوى أفقي: دائرة ناعمة وحلقة على شكل زهرة أكثر تطلبًا بتغير الانحناء. بالنسبة للمتحكم الجديد جربوا عدة أزمنة تقارب، من سريع جدًا إلى أكثر تراخٍ. تظهر النتائج أن كلا الطريقتين قادرتان في نهاية المطاف على إرشاد الروبوت على المنحنيات المطلوبة، لكن المتحكم بزمن محدد مسبقًا يصل إلى المسار أسرع عندما يكون أفقه الزمني قصيرًا، بينما تؤدي الآفاق الأطول إلى حركة أكثر سلاسة.
موازنة السرعة والجهد والثبات
تتجاوز الدراسة فحوصات المسارات البصرية البسيطة. إنها تحسب مدى انحراف الروبوت عن المسار المطلوب مع مرور الوقت، ومقدار القوة التي يجب أن تنتجها الدافعات، وكمية الطاقة الميكانيكية المستهلكة، ومدى سلاسة أوامر القوة بعد استقرار الروبوت. عندما يُختار زمن التقارب ليكون قصيرًا جدًا، يقلل المتحكم الجديد بشكل كبير خطأ التتبع لكنه يتطلب دفعات حادة من القوة ومناورات أكثر استهلاكًا للطاقة. ومع إطالة زمن التقارب المسموح به، تنخفض هذه القوى والاستهلاك الطاقي المرتبط بها، وتصبح إجراءات التحكم سلسة بقدر — أو أكثر — من تقنية التحكم بنمط الانزلاق بينما تظل الروبوتات أقرب إلى مسارها. حتى عندما يضيف الباحثون تيارات قوية، وتغيرات كبيرة في معلمات المركبة، وقراءات حساسات ضوضائية، تظل كلتا الطريقتين قويتي التحمل، لكن المتحكم بزمن محدد مسبقًا يحافظ على تتبُّع أكثر إحكامًا.
ماذا يعني هذا لمهمات المحيط المستقبلية
بالنسبة للمشغلين الذين يخططون لأساطيل من الروبوتات تحت الماء، الرسالة الأساسية هي أنهم يستطيعون الآن الموازنة بين السرعة والجهد بطريقة شفافة ويمكنهم، والأهم من ذلك، ضمان متى ستستقر الروبوتات على مساراتها. إذا كانت المهمة تتطلب توقيتًا صارمًا — مثل تنسيق مركبات متعددة، أو فحص جسم متحرك، أو الانعطاف سريعًا بعيدًا عن مخاطر — فإن المتحكم بزمن محدد مسبقًا يوفر تقاربًا دقيقًا قابلًا للضبط. عندما تكون السلاسة على المدى الطويل وتقليل تآكل المشغلات أهم من السرعة الخام، تظل الأساليب التقليدية لها مزايا. من خلال توضيح هذه المقايضات، يمهد هذا العمل الطريق لتوجيه روبوتات تحت الماء يكون أكثر قابلية للتنبؤ والموثوقية والكفاءة في البحار الحقيقية.
الاستشهاد: Keymasi-Khalaji, A., Tajpour-Fard, S. Predefined-time tracking control for underwater robots. Sci Rep 16, 10218 (2026). https://doi.org/10.1038/s41598-026-40596-2
الكلمات المفتاحية: الروبوتات تحت الماء, تتبع المسار, التحكم المُقيَّد زمنياً, ملاحة الروبوت, الاستقلالية البحرية