Clear Sky Science · pl
Sterowanie śledzeniem w czasie z góry określonym dla robotów podwodnych
Roboty na ścisłym harmonogramie pod powierzchnią
Autonomiczne pojazdy podwodne — roboty o kształcie torpedy przemierzające oceany — coraz częściej powierzane są zadaniom takim jak mapowanie dna morskiego, inspekcja konstrukcji morskich czy monitorowanie ekosystemów. Wiele z tych misji jest ograniczonych czasem: kilka pojazdów musi spotkać się w określonym miejscu i czasie, zeskanować obszar przed przepłynięciem statku lub unikać przeszkód w zatłoczonych wodach. W niniejszym badaniu zaprezentowano nowy sposób kierowania takimi robotami, dzięki któremu można zagwarantować osiągnięcie zaplanowanej trajektorii w precyzyjnie określonym przez użytkownika czasie — nawet gdy prądy odprowadzają je z kursu lub gdy ich dokładne zachowanie trudno zamodelować.
Dlaczego czas ma znaczenie dla robotów oceanicznych
Konwencjonalne metody prowadzenia robotów podwodnych koncentrują się na tym, by z czasem zmniejszyć różnicę między pozycją robota a pozycją docelową. Powszechnie stosowane podejście, zwane sterowaniem typu sliding‑mode, cenione jest za utrzymanie kursu nawet przy niedokładnym modelu pojazdu czy środowiska morskiego. Ma jednak istotną wadę w misjach krytycznych czasowo: czas wymagany do ustabilizowania się na pożądanej trajektorii zależy od początkowego odchylenia i szczegółów ruchu, więc operatorzy nie mogą łatwo przewidzieć, ile potrwa zbieżność. W zadaniach wymagających precyzyjnej synchronizacji lub ścisłych marginesów bezpieczeństwa ta niepewność może być kosztowna lub nawet niebezpieczna.
Metoda sterowania z wbudowanym terminem
Autorzy opracowali strategię sterowania o z góry określonym czasie, która wprowadza pożądany czas ustabilizowania bezpośrednio do prawa sterowania. Zamiast obiecywać jedynie, że błędy znikną „w końcu”, metoda pozwala inżynierowi określić horyzont zbieżności — na przykład kilka sekund na szybman manewr lub dłużej dla łagodniejszej reakcji — i projektuje sygnały sterujące tak, by zarówno błędy pozycji, jak i prędkości zbliżyły się do zera przed upływem tego terminu, niezależnie od punktu startowego robota. Osiąga się to przez dwuwarstwowy schemat: warstwa zewnętrzna oblicza pożądane prędkości w kierunku przód/bok na podstawie odległości od trajektorii, a warstwa wewnętrzna generuje siły napędowe potrzebne, by rzeczywiste prędkości odpowiadały tym celom. Starannie dobrane funkcje energii matematycznej dowodzą, że to połączenie zawsze doprowadzi robota na trajektorię w zadanym czasie.
Sprawdzanie metody w praktyce
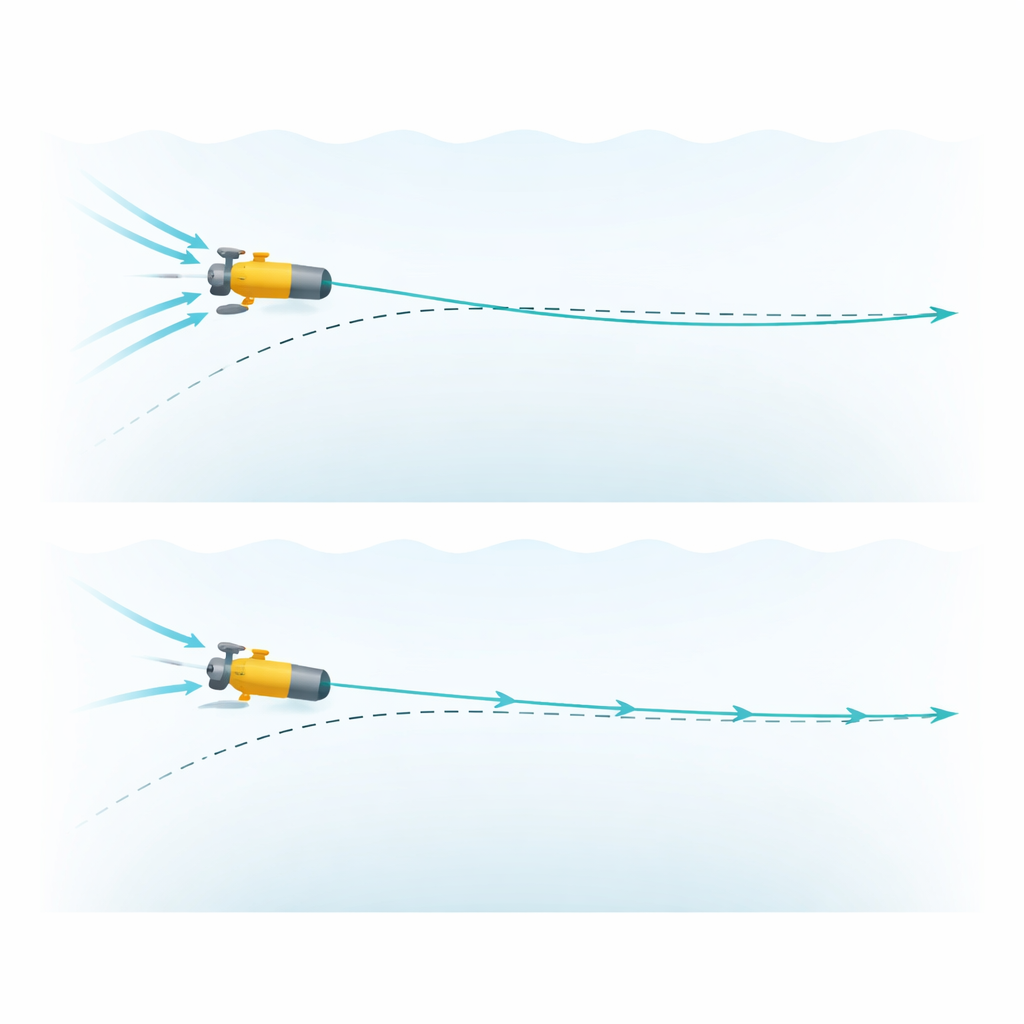
Aby porównać sterowanie z gwarantowanym czasem z bardziej znanym podejściem, badacze zastosowali oba do szczegółowego modelu komputerowego dobrze znanego pojazdu podwodnego REMUS‑100. Polecili wirtualnemu robotowi śledzić dwie rodzaje ścieżek w płaszczyźnie poziomej: gładkie koło oraz bardziej wymagającą pętlę w kształcie kwiatu o zmiennej krzywiźnie. Dla nowego regulatora przetestowali kilka czasów zbieżności, od bardzo szybkich po bardziej łagodne. Wyniki pokazują, że obie metody ostatecznie prowadzą robota wzdłuż żądanych krzywych, ale regulator z określonym z góry czasem osiąga trajektorię szybciej przy krótkim horyzoncie, natomiast dłuższe horyzonty dają łagodniejszy ruch.
Równoważenie prędkości, wysiłku i stabilności
Studium wykracza poza proste wizualne porównania trajektorii. Analizuje, o ile robot odbiega od żądanej ścieżki w czasie, jaką siłę muszą wytwarzać śruby napędowe, ile energii mechanicznej zużyto oraz jak gładkie są polecenia siły po ustabilizowaniu się robota. Gdy czas zbieżności jest bardzo krótki, nowy regulator znacząco redukuje błąd śledzenia, ale wymaga gwałtownych impulsów siły i bardziej energetycznych manewrów. W miarę wydłużania dozwolonego czasu zbieżności siły i zużycie energii spadają, a działania sterowania stają się tak płynne — lub płynniejsze — niż w przypadku sterowania sliding‑mode, przy jednoczesnym bliższym utrzymaniu się robota przy trajektorii. Nawet po wprowadzeniu silnych prądów, dużych zmian parametrów pojazdu i zaszumionych pomiarów sensorów, oba podejścia pozostają odporne, ale regulator z określonym czasem utrzymuje ściślejsze śledzenie.
Co to oznacza dla przyszłych misji oceanicznych
Dla operatorów planujących floty robotów podwodnych kluczowy wniosek jest taki, że mogą teraz w przejrzysty sposób ustawiać kompromis między prędkością a wysiłkiem, a co najważniejsze — zagwarantować, kiedy roboty osiągną swoje trasy. Jeśli misja wymaga ścisłego harmonogramu — na przykład koordynacji wielu pojazdów, inspekcji obiektu w ruchu czy szybkiego odciągnięcia się od zagrożeń — regulator z określonym wcześniej czasem oferuje precyzyjną, regulowaną zbieżność. Gdy ważniejsza jest długoterminowa gładkość i minimalne zużycie siłowników niż sama szybkość, tradycyjne metody wciąż mają zalety. Jasne zmapowanie tych kompromisów toruje drogę do bardziej przewidywalnego, niezawodnego i efektywnego prowadzenia robotów podwodnych na otwartym morzu.
Cytowanie: Keymasi-Khalaji, A., Tajpour-Fard, S. Predefined-time tracking control for underwater robots. Sci Rep 16, 10218 (2026). https://doi.org/10.1038/s41598-026-40596-2
Słowa kluczowe: roboty podwodne, śledzenie trajektorii, sterowanie z ograniczeniem czasowym, nawigacja robotów, autonomia oceaniczna