Clear Sky Science · tr
Olay tabanlı ay optik akış egomotion tahmin zorluğu: ELOPE yarışmasının tasarımı ve sonuçları
Aklı başında gözlerin ay inişleri için önemi
Uzay ajansları robotları ve nihayet insanları Aya geri göndermeye hazırlanırken, özellikle kutup bölgelerinde—buzun sürekli karanlıkta gizlenebileceği yerlerde—engebeli, gölgelik arazide güvenli bir şekilde iniş yapmak büyük bir zorluk haline geliyor. Bu makale, uzay araçları için “akıllı göz” olarak adlandırılan olay tabanlı kameranın yeni bir çeşidini inceliyor ve farklı ekiplerin bunu bir ay iniş aracını güvenli bir dokunuşa yönlendirmek için ne kadar iyi kullanabildiğini test eden dünya çapındaki bir yarışmanın sonuçlarını raporluyor.
Karanlıkta hareketi görmenin yeni bir yolu
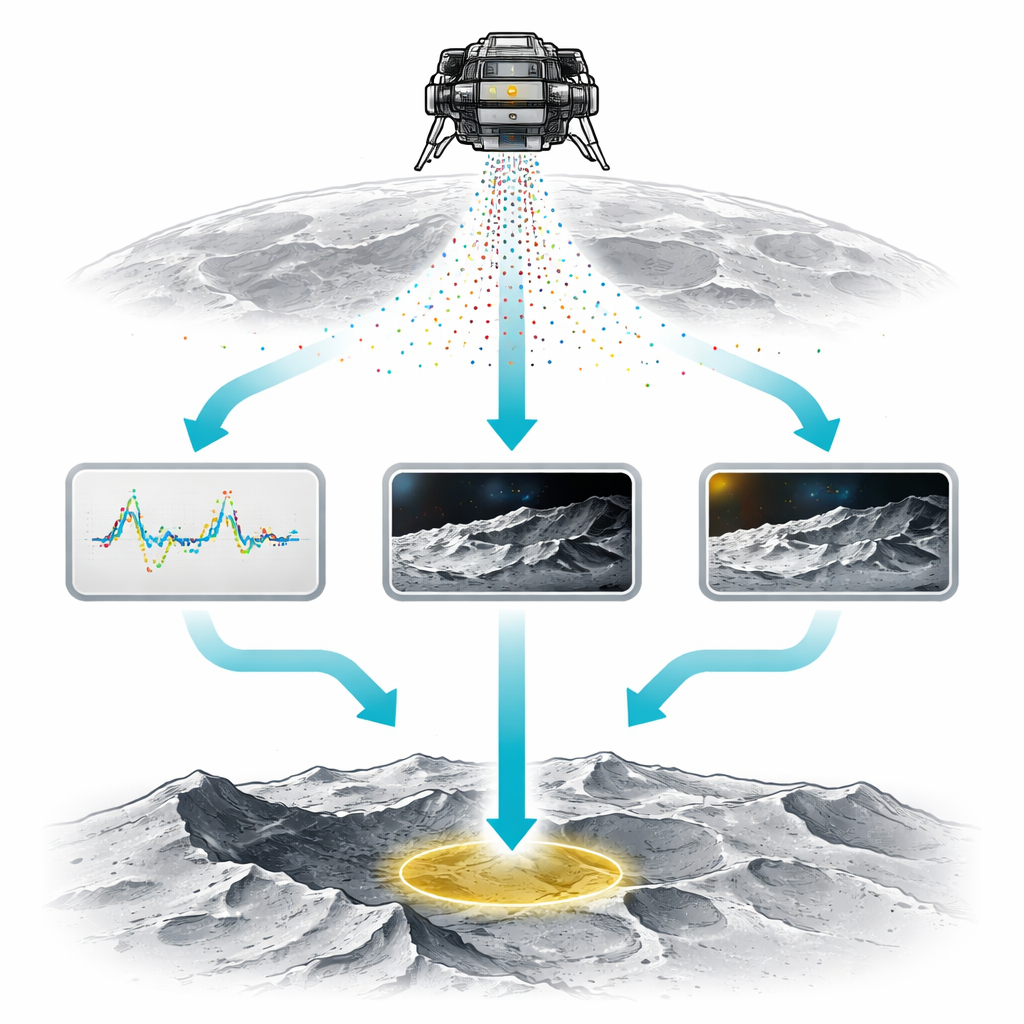
Sabit aralıklarla tam görüntüler çeken sıradan kameralardan farklı olarak, olay tabanlı kameralar yalnızca küçük bir pikselde parlaklığın değiştiği zaman tepki verir. Her değişiklik, zaman etiketli nokta atışı bir “olayı” tetikler ve hacimli görüntüler yerine seyrek, hızlı güncellemeler akışı oluşturur. Bu tasarım biyolojik gözlerin çalışma şeklini taklit eder ve uzay uçuşu için önemli avantajlar sunar: son derece hızlı tepki, çok geniş parlaklık aralığı ve düşük güç kullanımı. Bu güçlü yönler, Güneş’in ufku süpürdüğü, çukurların derin gölgede kaldığı ve parlak, yansıtıcı tozun geleneksel sensörleri kolayca boğabileceği Ay’ın Güney Kutbu çevresinde özellikle kullanışlıdır.
Gerçeğe yakın bir dijital ay oyun alanı kurmak
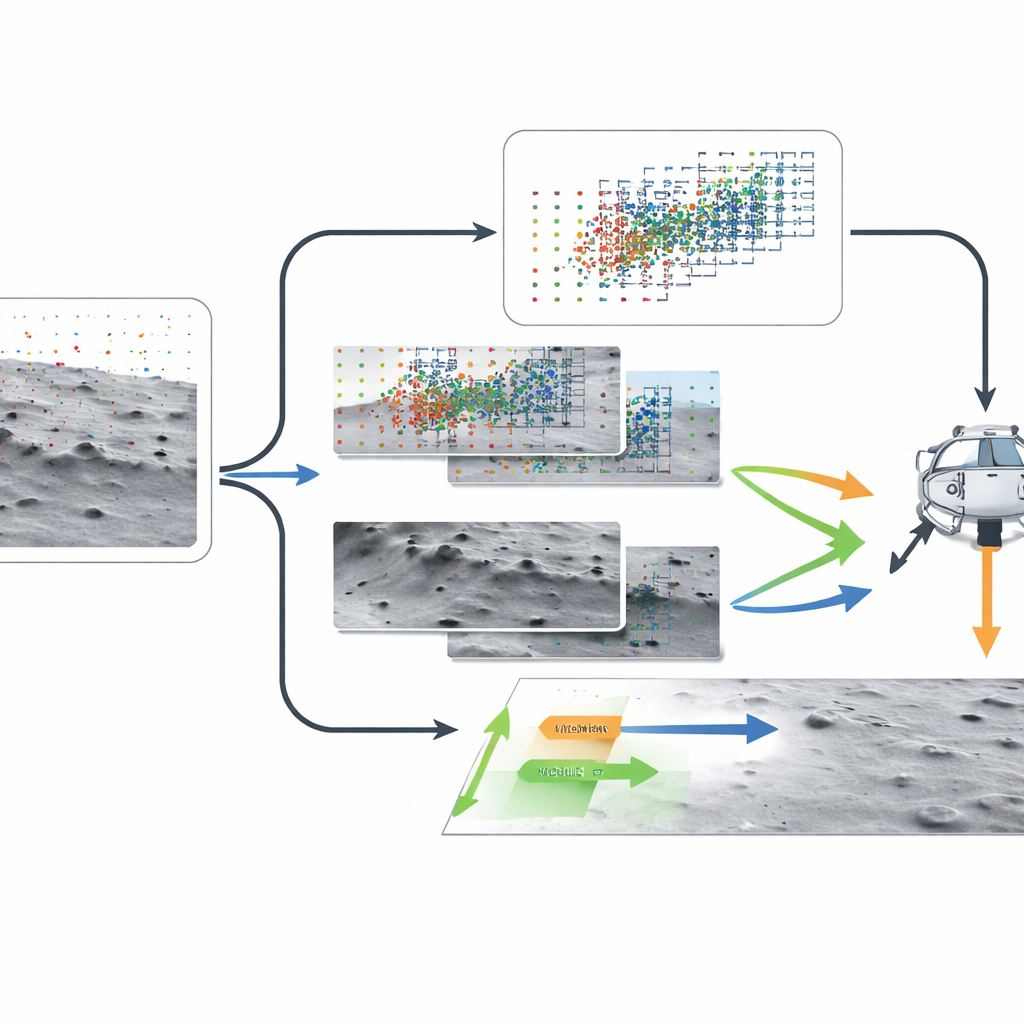
Ay’dan gerçek olay tabanlı veriler henüz mevcut olmadığından, araştırmacılar ELOPE veri kümesini ve yarışmasını oluşturdular. Özelleştirilmiş yazılım kullanarak, önce Apollo benzeri bir iniş aracına benzeyen bir uzay aracı için yakıt açısından verimli iniş yolları simüle ettiler; bunlar hem sıradan alçalmaları hem de yaklaşma sırasında iniş noktasının geç değiştiği daha karmaşık “saptırma” manevralarını içeriyordu. Ardından bir gezegensel render aracı, bu yollar boyunca farklı ışıklandırma koşulları altında yüzeyin ayrıntılı, fotoğraf benzeri görünümlerini üretti ve bir olay-kamera simülatörü görüntü dizilerini olay akışlarına dönüştürdü. Her dizinin, aracın gerçek hareketi için kusursuz “cevap anahtarları” ile birlikte hareket sensörü ve lazer uzaklıkölçer gibi sanal okumaları vardı; bu da yarışmacıların yöntemlerinin aracın hızını ve yönünü ne kadar hassas yeniden kurabildiğini test etmelerini sağladı.
Akıllı navigasyon fikirlerinin küresel yarışı
ELOPE yarışması üniversitelerden, sanayiden ve bağımsız araştırmacılardan 44 ekip çekti; 21 ekip final skor tablosuna ulaştı ve 132 çözüm sundu. Tüm ekiplerin aynı sentetik sensör verilerinden aracıın üç boyutlu hızını zaman içinde tahmin etmeleri gerekiyordu. Organizatörler ayrıca önce olayları görüntülere çeviren ve ardından standart optik akış tekniklerini uygulayan güçlü bir çerçeve tabanlı referans yöntemi sağladı; amaç yarışmacıları olay tabanlı algılamanın tam potansiyelinden yararlanarak bunu geçmeye zorlamaktı. Sadece üç ekip bu temel performansı aşabildi; bu da teknolojinin hem vaatlerini hem de mevcut sınırlarını ortaya koydu.
Hareketi okumaya giden üç kazanan yol
Birinci takım SOMIS-LAB dünyayı tamamen olay temelli bir bakışla ele aldı. Olayları sabit zaman dilimlerine paketlemek yerine, yöntemleri gelen olay sayısına göre zaman penceresini dinamik olarak ayarladı; ardından olayları olası hareket tahminlerine göre çarpıtarak frekans alanında ortaya çıkan desenin ne kadar “keskin” göründüğünü değerlendirdiler. Sahnedeki kenarları olabildiğince netleştiren hareketi arayarak en iyi doğruluğu elde ettiler—ancak günümüzde gerçek bir iniş için çok yavaş olan yüksek bir hesaplama maliyetiyle. İkinci ve üçüncü olan HRI ve LUNARIS ise daha geleneksel bir yol izledi: olayları kısa ömürlü görüntülere aktardılar ve yerleşik bilgisayarlı görü araçlarını kullandılar. Bunlardan biri ay yüzeyini neredeyse düz kabul edip ardışık görüntüler arasındaki en iyi genel dönüşümü buldu; diğeri piksel bazında ayrıntılı hareket tahmini yaptı, hareket sensörü verilerini kullanarak aracın dönmesinden kaynaklanan kısmı çıkardı ve mesafe bilgisiyle bunu birleştirerek aracın hızını çıkardı. Bu yaklaşımlar gerçek zamanlı kullanım için yeterince hızlıydı ve hâlâ referans yöntemi geride bıraktı.
Zor vakalardan öğrendiklerimiz
Tüm yöntemlerin zorlandığı durumları inceleyerek, yazarlar en zor yörüngelerin güçlü aydınlatma problemleri olanlar olduğunu buldular—aşırı doygun veya kötü pozlanmış kaynak görüntüler, dönüştürüldüğünde çok az anlamlı olay üretiyordu. Ayrıca, keskin dönüşler ve tutum değişiklikleri içeren karmaşık saptırma manevralarının genellikle düz inişlere göre yeniden oluşturulmasının daha zor olduğunu gördüler. İlginç olarak, birçok ekip derin öğrenmeyi denedi ancak genellikle son gönderimleri için klasik görme yöntemlerine geri döndü; bunun nedenleri arasında seyrek olaylar, sınırlı eğitim verisi ve sağlam genelleme ihtiyacı gibi zorluklar sayıldı. Yarışma sonrası bir anket ayrıca katılımcıların çoğunun olayları sabit zamanlamalı karelere dönüştürdüğünü ortaya koydu; bu da kazanan ekibin tam olay odaklı stratejisinin hâlâ ne kadar nadir olduğunu vurguluyor.
Gelecek ay görevleri için anlamı
Çalışma, olay tabanlı kameraların özellikle zorlu kutup bölgelerinde gelecekteki ay iniş sistemleri için güçlü adaylar olduğunu sonucuna varıyor. Sentetik bir veri kümesi ve eksik kamera kalibrasyon detaylarının ek dezavantajına rağmen, birkaç ekip dikkatle hazırlanmış bir çerçeve tabanlı referans yöntemine eşit veya daha iyi performans gösterdi. En doğru çözüm, olay akışını tamamen benimsemenin mükemmel hareket tahminleri sağlayabileceğini gösterirken, hızlı çerçeve tabanlı hibritler pratik, gerçek zamanlı sistemlerin zaten erişilebilir olduğunu kanıtladı. Birlikte, bu sonuçlar Ay ve ötesinde hızlı hareketi ve zorlu aydınlatmayı canlı bir göz gibi “görebilen” iniş araçlarına doğru atılmış önemli bir adımı işaret ediyor ve güvenli, hassas iniş şanslarını artırıyor.
Atıf: Fanti, P., Williams, L.B.S., Dvořák, O. et al. Event-based lunar optical flow egomotion estimation challenge: design and results of the ELOPE competition. npj Space Explor. 2, 18 (2026). https://doi.org/10.1038/s44453-026-00033-0
Anahtar kelimeler: olay tabanlı görme, ay inişi, egomotion tahmini, nöromorfik sensörler, özerk navigasyon