Clear Sky Science · ru
Задача по оценке эгомоции на основе событийного оптического потока при посадке на Луну: разработка и результаты соревнования ELOPE
Почему более «умные» глаза важны для посадок на Луну
Когда космические агентства готовятся отправлять роботов и, в конечном счёте, людей обратно на Луну, безопасная посадка в неровной, тёмной местности — особенно вблизи полюсов, где лёд может скрываться в постоянной тени — становится серьёзной проблемой. В этой статье рассматривается новый тип «умного глаза» для космических аппаратов, называемый событийной камерой, и описывается мировое соревнование, в котором проверяли, насколько успешно разные команды смогли использовать её для наведения лунного посадочного аппарата к безопасной точке касания.
Новый способ видеть движение в темноте
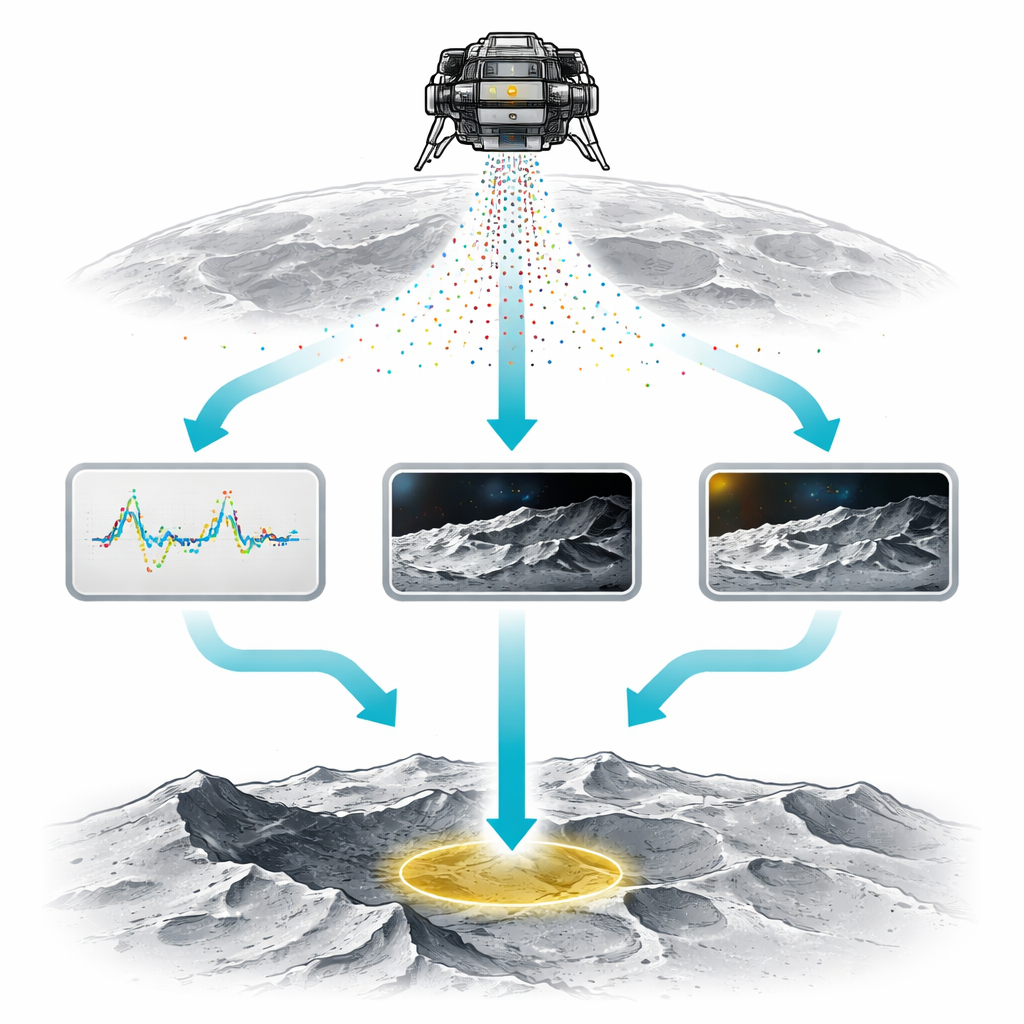
В отличие от обычных камер, которые снимают полные кадры через равные промежутки времени, событийные камеры реагируют только на изменения яркости в отдельных пикселях. Каждое такое изменение порождает точечное «событие» с точной временной меткой, формируя поток разреженных, быстрых обновлений вместо тяжёлых изображений. Такая конструкция имитирует работу биологических глаз и даёт ключевые преимущества для космических полётов: чрезвычайно быструю реакцию, очень широкий динамический диапазон и малое энергопотребление. Эти сильные стороны особенно полезны у Южного полюса Луны, где Солнце мелькает по горизонту, кратеры погружены в глубокую тень, а яркая отражающая пыль легко может перегрузить традиционные датчики.
Создание реалистичной цифровой «лунной» площадки
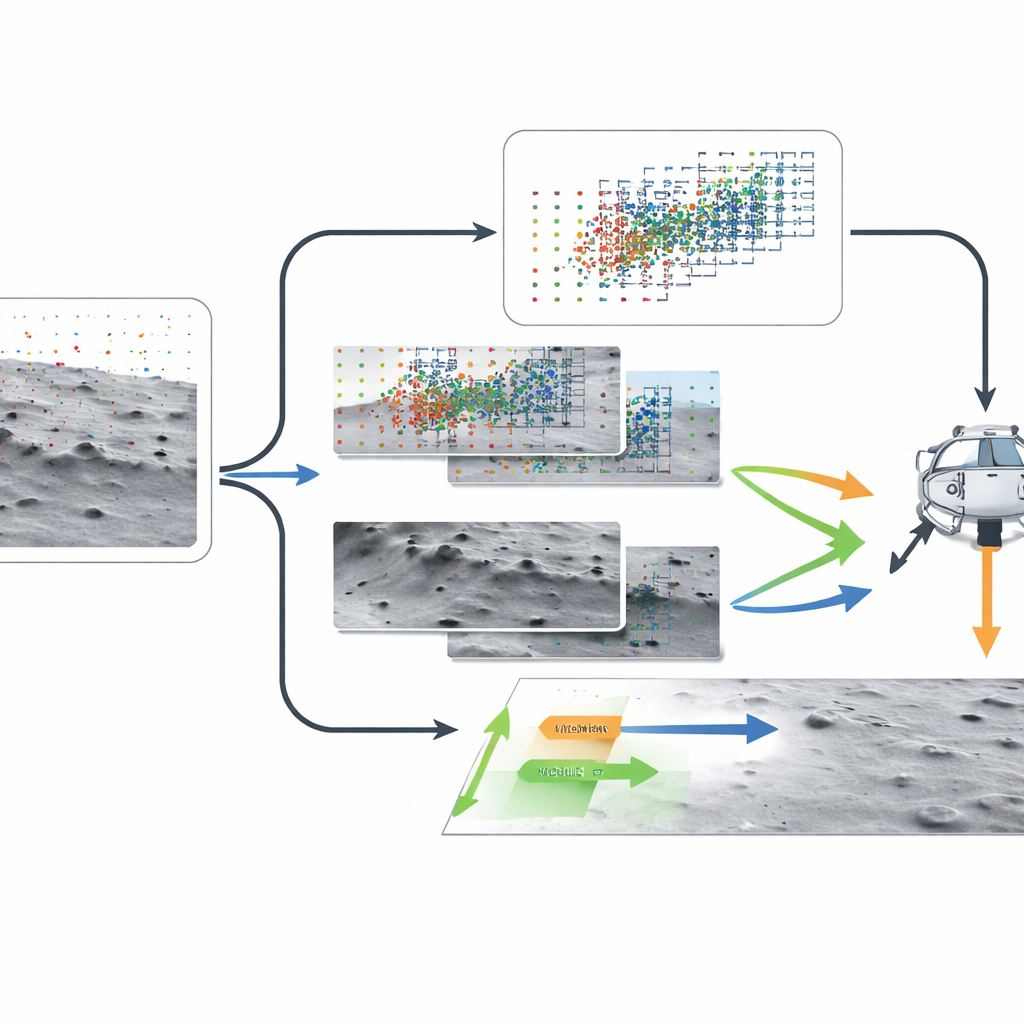
Поскольку реальные событийные данные с Луны пока отсутствуют, исследователи создали набор данных и конкурс ELOPE. С помощью специализированного ПО они сначала смоделировали топливосберегающие траектории посадки для аппарата, похожего на лунный модуль «Аполлона», включая как обычные спуски, так и более сложные манёвры «переназначения», когда место касания меняется поздно в заходе. Планетарный рендерер затем сгенерировал детализированные, фотореалистичные виды поверхности вдоль этих траекторий при разных условиях освещения, а симулятор событийной камеры преобразовал последовательности изображений в потоки событий. Каждая последовательность сопровождалась «идеальными» ответами о реальном движении аппарата, а также виртуальными показаниями инерционного датчика и лазерного дальномера, что позволило участникам проверять, насколько точно их методы восстанавливают скорость и направление движения аппарата.
Глобальный конкурс идей умной навигации
Соревнование ELOPE привлекло 44 команды из университетов, промышленности и среди независимых исследователей; 21 команда добралась до итоговой таблицы и представила 132 решения. Всем командам нужно было оценить трёхмерную скорость аппарата во времени по одним и тем же синтетическим данным датчиков. Организаторы также предоставили сильный эталонный метод на базе кадров, который сначала преобразовывал события в изображения, а затем применял стандартные методы оптического потока, стимулируя участников превзойти его, используя весь потенциал событийного восприятия. Лишь три команды обошли этот базовый уровень, что показало и обещание, и нынешние ограничения технологии.
Три выигрышные стратегии чтения движения
Победившая команда SOMIS-LAB полностью опиралась на событийный взгляд на мир. Вместо того чтобы упаковывать события в фиксированные временные срезы, их метод динамически регулировал временное окно в зависимости от числа поступивших событий, затем смещал события согласно пробным предположениям о движении и оценивал, насколько «резкой» получалась результирующая картина в частотной области. Ища движение, которое делало края сцены максимально чёткими, они достигли наилучшей точности — хотя с высокой вычислительной стоимостью, которая в настоящий момент была бы слишком медленной для реальной посадки. Команды, занявшие второе и третье места, HRI и LUNARIS, выбрали более традиционный подход: они агрегировали события в кратковременные изображения и использовали проверенные инструменты компьютерного зрения. Одна команда считала лунную поверхность почти плоской и искала лучшее общее преобразование между последовательными кадрами; другая оценивала детальное помпиксельное движение, исключала компоненту, вызванную вращением аппарата, с помощью данных инерционного датчика, и комбинировала это с информацией о расстоянии, чтобы вывести скорость аппарата. Эти подходы были достаточно быстры для работы в реальном времени и при этом превзошли эталон.
Чему нас учат трудные случаи
Анализ областей, где все методы испытывали трудности, показал, что самыми сложными траекториями были те, что сопровождались сильными проблемами освещения — пересветами или плохой экспозицией исходных изображений, которые приводили к малому числу информативных событий после преобразования. Также выяснилось, что сложные манёвры переназначения с более резкими поворотами и изменениями ориентации в целом было труднее восстановить, чем прямые спуски. Интересно, что многие команды экспериментировали с глубоким обучением, но зачастую в финальных решениях возвращались к классическим методам зрения, ссылаясь на такие трудности, как разреженность событий, ограниченные обучающие данные и необходимость устойчивой обобщающей способности. Послесоревновательный опрос также показал, что большинство участников конвертировали события в кадры с фиксированным таймингом, подчёркивая, насколько редкой остаётся полностью событийная стратегия победившей команды.
Что это значит для будущих лунных миссий
Исследование делает вывод, что событийные камеры являются серьёзными претендентами для систем посадки на Луну, особенно в требовательных полярных районах. Даже при использовании синтетического набора данных и при отсутствии деталей калибровки камеры несколько команд сравнялись или превзошли тщательно продуманный эталон на основе кадров. Самое точное решение показало, что полное принятие потока событий может дать отличные оценки движения, тогда как быстрые гибриды на базе кадров продемонстрировали, что практические системы в реальном времени уже достижимы. В совокупности эти результаты отмечают важный шаг к аппаратам, которые могут «видеть» быстрое движение и суровое освещение более по-биологически, повышая шансы на безопасные и точные посадки на Луне и за её пределами.
Цитирование: Fanti, P., Williams, L.B.S., Dvořák, O. et al. Event-based lunar optical flow egomotion estimation challenge: design and results of the ELOPE competition. npj Space Explor. 2, 18 (2026). https://doi.org/10.1038/s44453-026-00033-0
Ключевые слова: событийное зрение, посадка на Луну, оценка эгомоции, нейроморфные датчики, автономная навигация