Clear Sky Science · ja
イベントベースの月面光学フロー自位置推定チャレンジ:ELOPE競技会の設計と結果
なぜ“賢い目”が月着陸で重要か
宇宙機関がロボットや最終的には人を月に再び送る準備を進める中で、特に極地のように氷が常に暗闇に隠れている可能性のある場所では、凹凸や影の多い地形に安全に着陸することが大きな課題となります。本稿は宇宙船向けの新しいタイプの「賢い目」であるイベントベースカメラを検討し、これを用いて月着陸機を安全な着地点へ誘導する能力を評価する世界規模の競技会の報告を行います。
暗闇で動きを捉える新しい方法
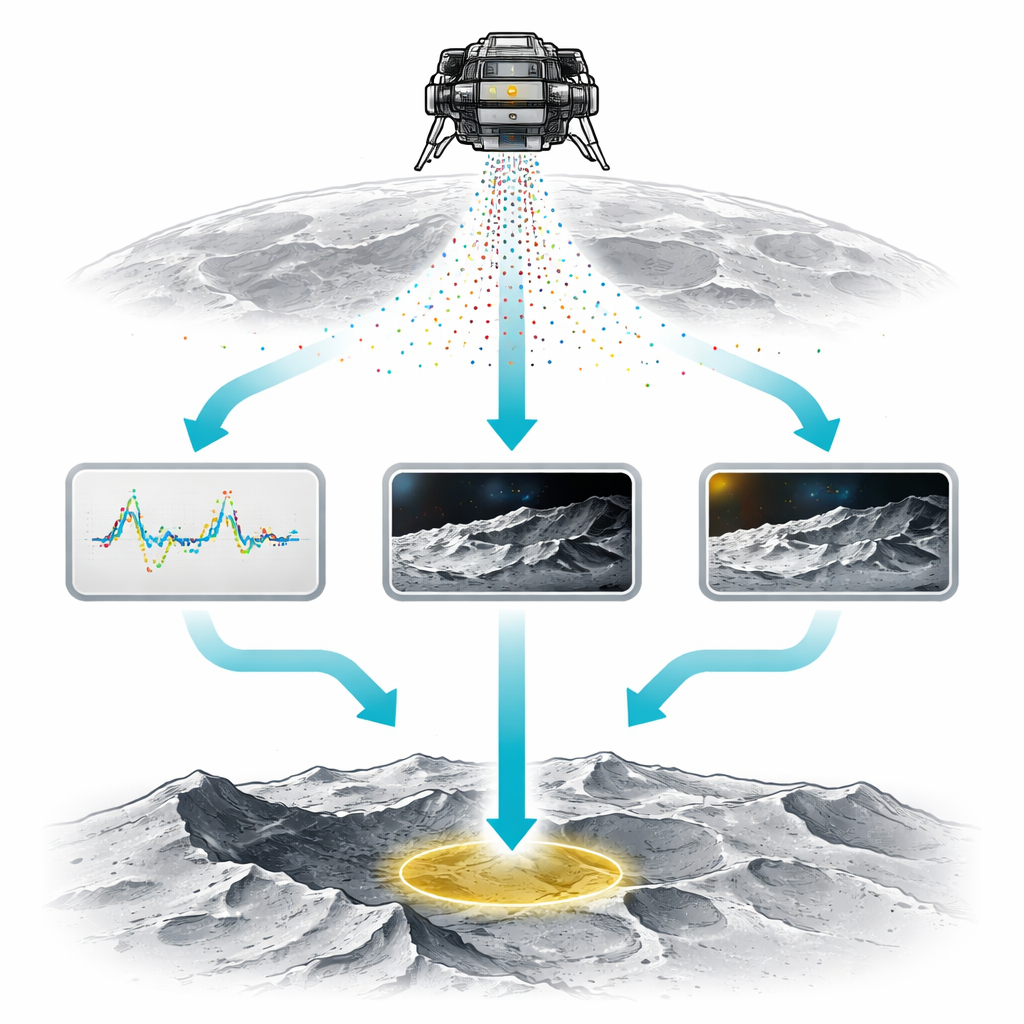
固定間隔で完全な画像を撮る従来のカメラとは異なり、イベントベースカメラは各画素の輝度が変化したときにのみ反応します。変化があると時間タグ付きのピンポイントな「イベント」が発生し、大きな画像の代わりに薄く、かつ高速な更新の流れが生成されます。この設計は生物の眼の働きを模倣しており、宇宙飛行において重要な利点をもたらします:極めて高速な応答、広い輝度レンジ、低消費電力です。これらの長所は、太陽が地平線すれすれに位置し、クレーターが深い影になり、反射性の高い微粒子が従来のセンサを容易に飽和させうる月の南極付近で特に有効です。
現実的なデジタル月面プレイグラウンドの構築
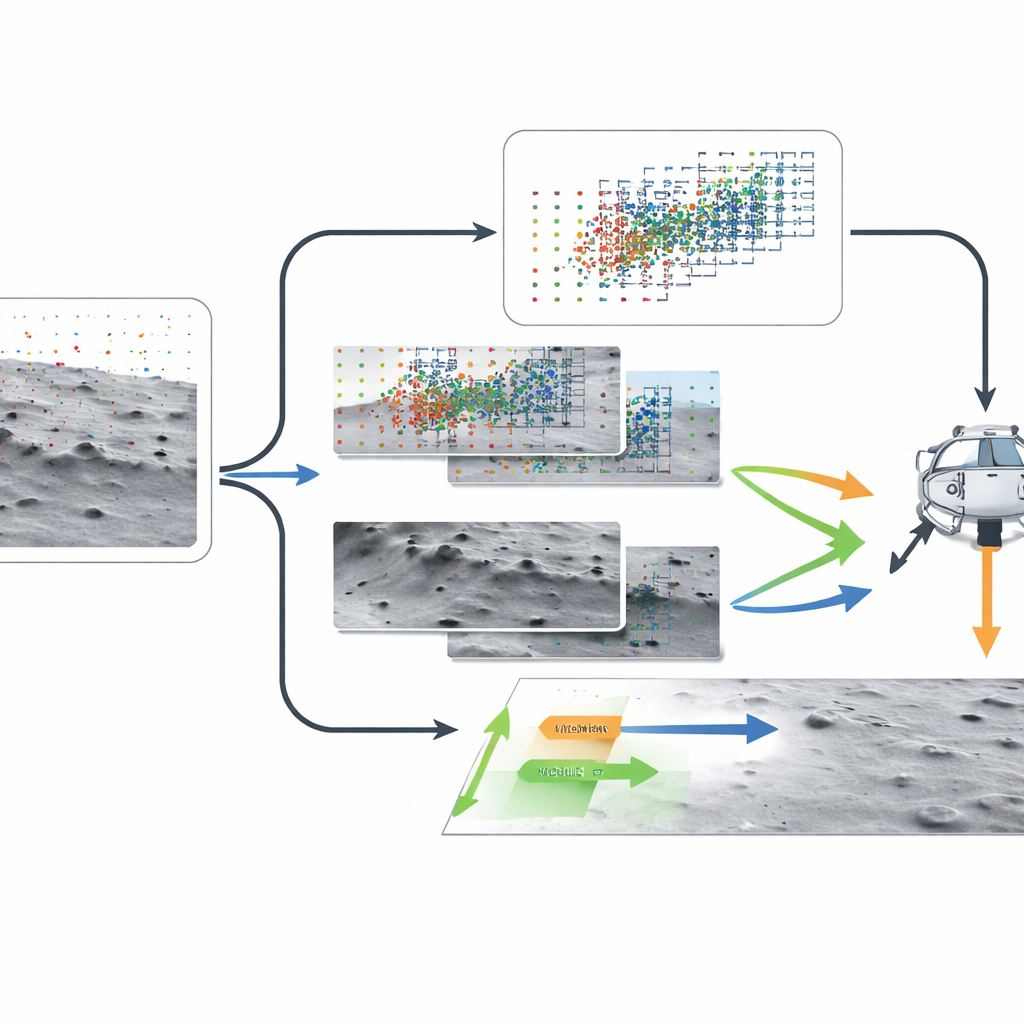
月からの実際のイベントベースデータはまだ存在しないため、研究チームはELOPEデータセットと競技を作成しました。専用ソフトを用いてまずアポロ着陸機に類似した宇宙船の燃料効率の良い降下経路をシミュレートし、通常の降下に加えて接近後半で着陸地点が変更される複雑な「迂回」機動も含めました。惑星表面レンダリングツールでこれらの経路に沿った詳細で写真のような視点を異なる照明条件下で生成し、イベントカメラのシミュレータが画像列をイベントの流れに変換しました。各シーケンスには着陸機の真の運動に関する完全な「答え」が付けられ、仮想的な慣性計測器やレーザー測距器の読みも含まれていて、参加者はこれらで着陸機の速度や進行方向をどれだけ正確に再構築できるかを試せました。
知的航法アイデアのための世界規模コンテスト
ELOPE競技には大学、産業界、独立研究者を含む44チームが参加し、21チームが最終スコアボードに名を連ね、計132のソリューションが提出されました。すべてのチームは同じ合成センサデータから着陸機の三次元速度を時間経過で推定しなければなりませんでした。主催者はイベントをまず画像に変換し、その後標準的なオプティカルフロー手法を適用する強力なフレームベースの参照法も提供し、参加者にイベントベースセンシングの潜在能力を活かしてこれを上回ることを促しました。参照ベースを上回ったのはわずか三チームで、技術の有望性と現状の限界が明らかになりました。
動きを読むための三つの勝利戦略
優勝チームのSOMIS-LABは、世界をイベントだけで捉える戦略に完全に賭けました。イベントを固定時間スライスにまとめるのではなく、到着するイベント数に応じて時間窓を動的に調整し、試行的な運動仮定に基づいてイベントをワープさせ、周波数領域で得られるパターンの「鮮明さ」を評価しました。シーンのエッジが最も鮮明になる運動を探索することで最高の精度を達成しましたが、計算コストが高く現行では実際の着陸には遅すぎます。2位と3位のHRIとLUNARISはより伝統的な手法を取り、イベントを短時間の画像にビンニングして既存のコンピュータビジョン手法を用いました。1チームは月面をほぼ平坦と見なし、連続する画像間の最適な全体変換を求め、もう1チームは詳細な画素ごとの動きを推定して慣性センサデータで生じる回転成分を除去し、距離情報と組み合わせて着陸機の速度を推定しました。これらのアプローチはリアルタイム用途に十分高速であり、参照法を上回りました。
困難事例から得られる教訓
全手法が苦戦した場面を分析すると、最も難しい軌道は強い照明問題—飽和や露出不足で元画像が多くの意味あるイベントを生まなかったケース—であることが分かりました。また、旋回や姿勢変化の鋭い複雑な迂回機動は、単純な降下より再構築が一般に難しいことも示されました。興味深いことに、多くのチームが深層学習を試みた一方、最終提出ではスパースなイベント、限られた訓練データ、堅牢な一般化の必要性といった課題から古典的なビジョン手法に戻ることが多かったです。競技後のアンケートでも大半の参加者がイベントを固定タイミングのフレームに変換していたことが示され、優勝チームのような完全なイベント駆動戦略がまだ稀であることを浮き彫りにしました。
将来の月ミッションへの意味
本研究は、イベントベースカメラが特に過酷な極地領域において将来の月面着陸システムの有力候補であると結論付けています。合成データセットとカメラ較正情報の欠如という不利があっても、複数のチームが精巧に作られたフレームベースの参照法に匹敵あるいはそれを上回りました。最も正確な解はイベントストリームを全面的に活用することで優れた運動推定が得られることを示し、一方で高速なフレームベースのハイブリッド法は実用的なリアルタイムシステムが既に手の届くところにあることを示しました。これらの成果は、急速な運動や過酷な照明条件を生体の眼のように“見る”ことのできる着陸機の実現に向けた重要な一歩を示しており、月やそれ以遠での安全で精密なタッチダウンの可能性を高めます。
引用: Fanti, P., Williams, L.B.S., Dvořák, O. et al. Event-based lunar optical flow egomotion estimation challenge: design and results of the ELOPE competition. npj Space Explor. 2, 18 (2026). https://doi.org/10.1038/s44453-026-00033-0
キーワード: イベントベースビジョン, 月面着陸, 自位置推定, ニューロモルフィックセンサ, 自律航法