Clear Sky Science · tr
Sonlu Markov-modüle rastgele yürüyüşlerde ergodiklik ve rejim geri kazanımı
Rastgele hareketteki gizli desenlerin neden önemi var
Çevremizdeki birçok sistem saf gürültüymüş gibi görünür: yukarı aşağı sallanan hisse senedi fiyatları, bir akışkanda çarpışan parçacıklar veya bir ağ üzerinde zıplayan veri paketleri. Ancak bu gürültülü hareketler sıklıkla hareketi sessizce değiştiren, yavaş ve görünmez kuvvetler ya da "rejimler" tarafından yönlendirilir. Bu makale, bu fikrin basit ama etkili bir versiyonunu inceliyor: kısa bir çizgi üzerinde ileri geri hareket eden bir rastgele yürüyüşçü ve yürüyüşçünün davranışını değiştiren birkaç moda geçiş yapan görünmez bir ortam. Yazarlar önce bu sistemi olasılık kuramıyla nasıl temiz bir şekilde tanımlayacaklarını gösteriyor, ardından standart makine öğrenimi araçlarının yalnızca yürüyüşçünün yolunu izleyerek gizli rejimleri ne ölçüde ortaya çıkarabileceğini araştırıyor.
Bir yürüyüşçü görünmez bir çevreyi nasıl hisseder
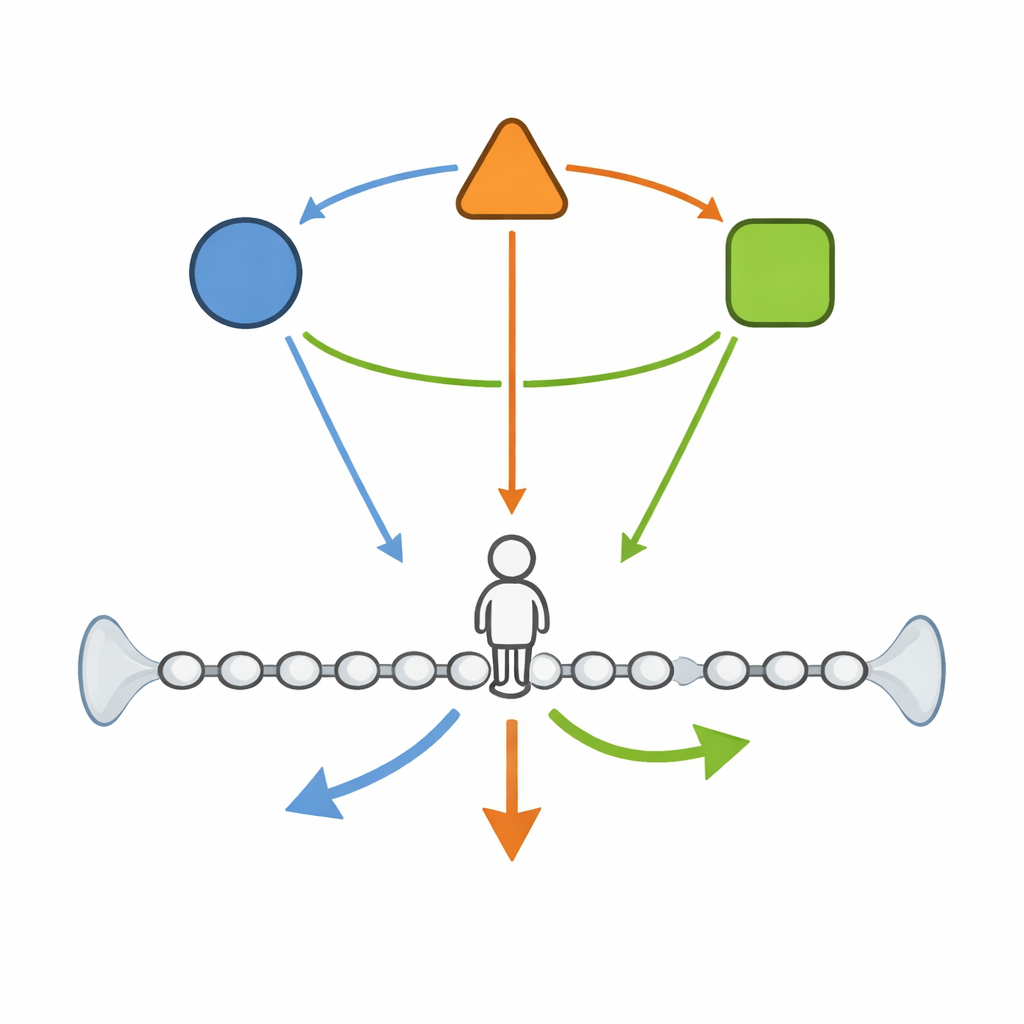
Başlangıç noktası, sonu başına kadar yansıtıcı duvarlara sahip sonlu tek boyutlu bir ızgarada yaşayan bir yürüyüşçüdür; böylece kaçamaz. Her zaman adımında yürüyüşçü sola gidebilir, sağa gidebilir veya olduğu yerde kalabilir. Kritik olarak, sola veya sağa gitme olasılıkları sabit değildir: bunlar kendi Markov kurallarına göre birkaç durum arasında atlayan görünmez bir "çevre"ye bağlıdır. Çevre bir durumda iken yürüyüşçü sağa doğru eğilimli olabilir; başka bir durumda sola adım atmayı veya daha sık durmayı tercih edebilir. Matematiksel olarak konum ve çevrenin birleşik sistemi sonlu bir durum uzayında ortak bir Markov zinciri oluşturur ve yazarlar tam geçiş kurallarını ile olasılıkların zamanla nasıl evrildiğini tanımlayan ayrık zamanlı bir ustalık denklemini (master equation) yazarlar.
Uzun vadeli kararlılık ve karışmanın garanti altına alınması
Yürüyüşçü ve çevre etkileştiği için, sistemin takılıp kalabileceği veya düzensiz davranabileceği endişesi olabilir. Yazarlar bunu dışlayan basit yapısal koşulları belirler. Çevrenin herhangi bir durumdan başka herhangi bir duruma sonunda ulaşabilmesi ve bulunduğu yerde kalma olasılığına sahip olması, ve her rejimde yürüyüşçünün hat boyunca sağa ve sola hareket edebilmesi ile birleşik sistemde en az bir gerçek "olduğu yerde kalma" hareketinin mevcut olması istenir. Bu doğal varsayımlar altında standart sonlu Markov zinciri teorisi devreye girer: birleşik süreç yalınlaştırılamaz (irreducible) ve periyodsüzdür, benzersiz bir uzun dönem durağan dağılıma sahiptir ve ortak davranış zamanla bu dağılıma yakınsar. Bu ergodiklik sonucu, uzun simüle edilmiş yolların öğrenme algoritmalarına beslenirken kararlı, iyi karışmış bir sistemden üretilmiş gibi ele alınmasını haklı çıkarır.
Makinelere gizli rejimleri okumayı öğretmek
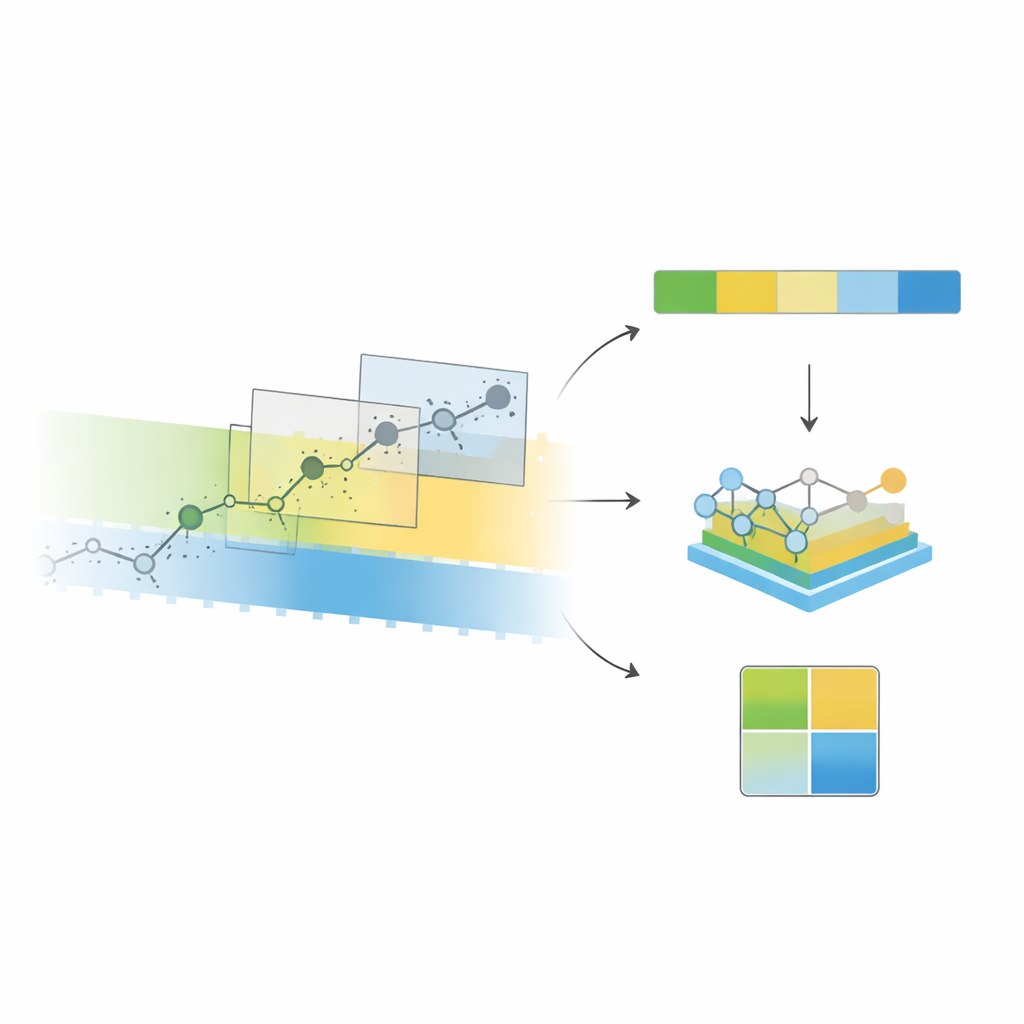
Bu olasılıksal omurganın üzerine yazarlar simüle edilmiş yürüyüşçüyü denetimli öğrenme için bir veri kaynağı olarak ele alır. Yürüyüşçünün artış dizisini (küçük hareketlerin ardışıklığı) örtüşen pencerelere bölerler ve her pencereyi basit özet özelliklere çevirirler: adımların ortalamaları ve değişkenliği, adımların pozitif veya sıfır olma sıklığı, kısa dönem bağımlılık ve son birkaç hareketin temel tanımlayıcıları. Her pencereye iki etiket verilir: pencerenin sonunda çevre durumu ve bir sonraki adımın işareti. Yalnızca bu düşük düzey özellikleri kullanarak, destek vektör makineleri, rastgele ormanlar ve gradyan artırma makineleri gibi hazır sınıflandırıcılar, iki rejimli bir ortamda gizli çevreyi şaşırtıcı biçimde iyi şekilde ortaya çıkarabilir; doğruluk ve dengelenmiş F1 skorları 0.9 civarındadır. Gerçek simülatör parametrelerini kullanmasına izin verilen ancak yalnızca aynı yerel pencereyi gören olasılık-temelli bir gizli Markov modeli de yararlı bir referans sağlar ve karşılaştırılabilir rejim tespit performansı verir.
Bir sonraki adımı tahmin etmek ve çevreyi yeniden yapılandırmak
Yazarlar daha sonra, mevcut rejimi bilmenin veya tahmin etmenin yürüyüşçünün bir sonraki hareketini tahmin etmeye yardımcı olup olmadığını sorar. Üç tahmin ediciyi karşılaştırırlar: rejimleri yok sayan bir model, özelliklere ilk görevden elde edilen tahmini rejim olasılıklarını ekleyen bir model ve gerçek rejimi gören varsayımsal bir "kahin". Varsayılan yapılandırmalarında, tahmin edilen rejimleri beslemek tabana göre yalnızca mütevazı ve tam olarak istikrarlı olmayan iyileşmeler sağlar. Buna karşılık, kahin tahmin edici özellikle olasılıksal puanlama açısından belirgin biçimde daha iyi performans gösterir; bu da mükemmel rejim bilgisinin önemli tahminsel kazançlar sağlayacağını, mevcut sınıflandırıcıların ise bunların yalnızca bir kısmını çıkarabildiğini gösterir. Son olarak, yazarlar çözümlenmiş çevre dizisini kullanarak sistemin aynı rejimde kalma veya değiştirme sıklığını ve çıkarılan uzun dönem rejim frekansları ile karışma hızlarını tahmin ederler. Bireysel yanlış sınıflandırmalara rağmen, yeniden yapılandırılmış geçiş matrisi, durağan dağılım ve spektral boşluk gerçek çevreden türetilenlere yakın olup; rejim sürekliliğinin hafifçe sistematik olarak az tahmin edilmesi görülür.
Gürültülü sistemlerde gizli yapıyı bulmanın anlamı
Genel olarak, çalışma gösteriyor ki küçük bir gizli Markov çevresi tarafından sürülen görünüşte basit bir rastgele yürüyüş, sağlam olasılık ile pratik makine öğrenimini birleştirmek için temiz bir test yatağı sağlar. Hafif koşullar altında birleşik sistem kararlı bir uzun dönem davranışına yerleşir ve gizli rejimler yürüyüşçünün hareketinin kısa pencerelerinde tespit edilebilir bir iz bırakır. Temel özellikleri kullanan standart sınıflandırıcılar bu rejimleri güvenilir şekilde ortaya çıkarabilir ve tek bir uzun yolculuktan gözlemlenmeyen çevrenin kaba dinamik özelliklerini bile geri kazanabilir. Aynı zamanda, kusurlu rejim tahminleriyle yakın vadeli tahminde elde edilen mütevazı kazanımlar, "prensipte"ki değerin ve mevcut yöntemlerin sonlu veriden ne ölçüde çıkarabildiği arasındaki farkı vurgular. Bu fark ve olasılıksal yapı ile öğrenilebilirlik arasındaki açık bağlantı, gürültülü zaman serilerinde gizli sürücüleri ortaya çıkarmak için daha zengin modeller ve çıkarım araçlarına doğru bir yol gösterir.
Atıf: Pambukyan, A., Saudagar, A.K.J. & Kumar, S. Ergodicity and regime recoverability in finite Markov-modulated random walks. Sci Rep 16, 12376 (2026). https://doi.org/10.1038/s41598-026-45019-w
Anahtar kelimeler: Markov-modüle rastgele yürüyüş, gizli rejimler, ergodik Markov zincirleri, zaman serisi sınıflandırması, gizli Markov modelleri