Clear Sky Science · ru
Эргодичность и восстановимость режимов в конечно-марковских случайных блужданиях
Почему скрытые закономерности в случайном движении важны
Многие системы вокруг нас выглядят как чистый шум: котировки акций колеблются вверх-вниз, частицы сталкиваются в жидкости или пакеты данных перескакивают по сети. Тем не менее за этими шумными движениями часто стоят медленно меняющиеся, невидимые силы или «режимы», которые незаметно изменяют характер движения. В этой статье изучается простая, но мощная версия этой идеи: блуждающий агент перемещается взад-вперед по короткой линии, в то время как невидимая среда переключается между несколькими режимами, меняя поведение агента. Авторы сначала показывают, как чётко описать такую систему в терминах теории вероятностей, а затем исследуют, насколько стандартные инструменты машинного обучения способны восстановить скрытые режимы только по наблюдению траектории агента.
Как блуждающий агент «ощущает» невидимую среду
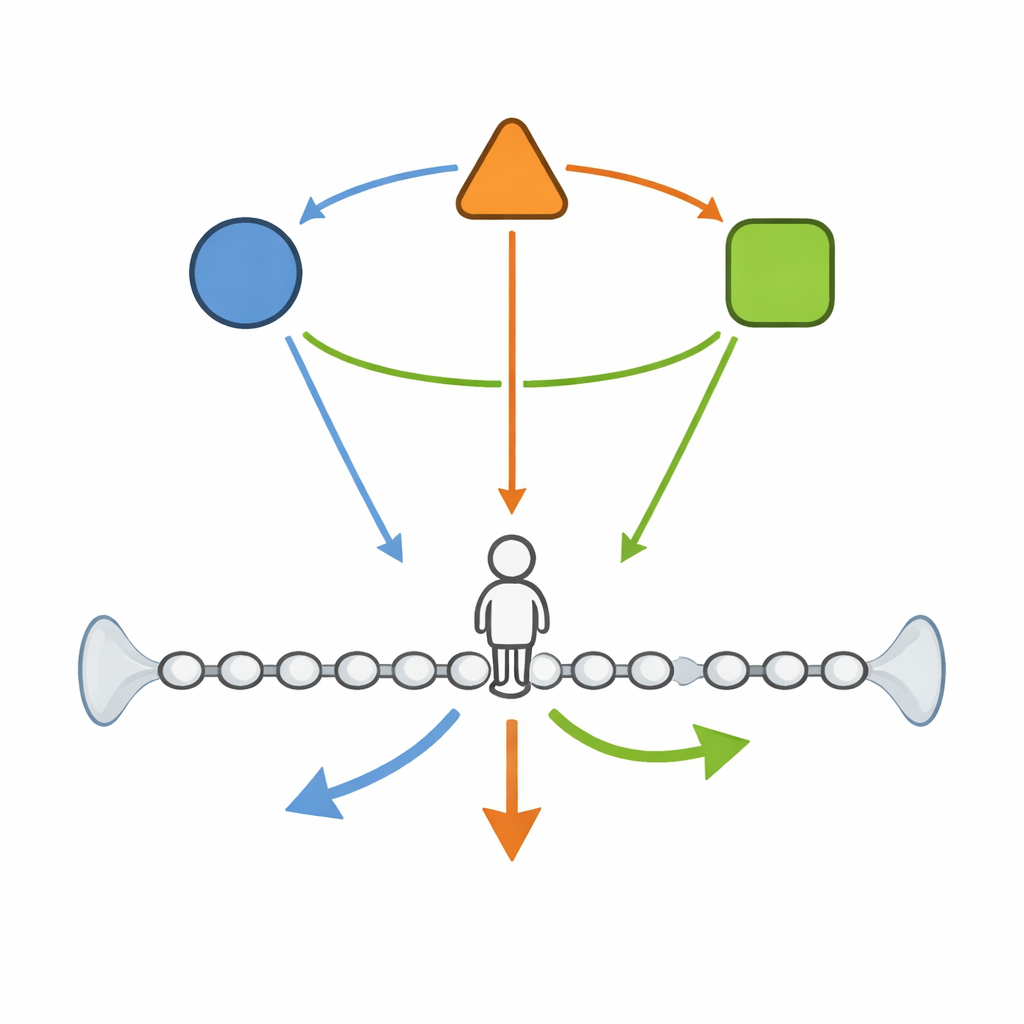
Отправной точкой является агент, живущий на конечной одномерной решётке — ряду позиций от одного конца до другого с отражающими границами, чтобы он не мог уйти. На каждом временном шаге агент может сдвинуться влево, вправо или остаться на месте. Ключевое: вероятности ходов влево или вправо не фиксированы — они зависят от невидимой «среды», которая сама по себе прыгает между состояниями по марковским правилам. В одном состоянии среды агент может иметь смещение вправо; в другом — предпочитать шагать влево или чаще оставаться на месте. Математически объединённая система положения и среды образует совместную цепь Маркова на конечном пространстве состояний, и авторы записывают полные правила переходов и дискретное уравнение эволюции для вероятностей во времени.
Гарантии долгосрочной устойчивости и смешивания
Поскольку агент и среда взаимодействуют, возникает опасение, что система может застрять или вести себя нерегулярно. Авторы выделяют простые структурные условия, которые исключают такие сценарии. Требуется, чтобы среда могла в конечном счёте достигнуть любого своего состояния из любого другого и имела некоторую вероятность оставаться в том же состоянии, а в каждом режиме агент мог перемещаться влево и вправо по линии, причём в совместной системе должно существовать по крайней мере одно «остаться на месте». При этих естественных предположениях вступает в силу стандартная теория конечных цепей Маркова: объединённый процесс является неразложимым и апериодическим, имеет единственное стационарное распределение в долгосрочной перспективе, и совместное поведение сходится к этому распределению по мере развития времени. Этот результат об эргодичности оправдывает трактовку длинных имитационных траекторий как порождённых устойчивой, хорошо смешанной системой при подаче их в алгоритмы обучения.
Обучение машин распознавать скрытые режимы
На базе этой вероятностной структуры авторы рассматривают смоделированного агента как источник данных для контролируемого обучения. Они разбивают последовательность приращений агента (чередование малых перемещений) на перекрывающиеся окна и преобразуют каждое окно в простые суммарные признаки: средние и вариативность шагов, долю положительных или нулевых шагов, краткосрочную зависимость и базовые характеристики последних нескольких ходов. Каждому окну присваиваются две метки: состояние среды в конце окна и знак следующего шага. Используя только эти низкоуровневые признаки, стандартные классификаторы — опорные векторы, случайные леса и бустинг — в двухрежимном случае удивительно хорошо восстанавливают скрытую среду, добиваясь точности и сбалансированного F1 около 0.9. Вероятностная скрытая модель Маркова, которой разрешено использовать истинные параметры симулятора, но только те же локальные окна, служит полезной точкой сравнения и даёт сопоставимые результаты обнаружения режимов.
Прогнозирование следующего шага и реконструкция среды
Далее авторы изучают, помогает ли знание или угадывание текущего режима предсказать следующий ход агента. Они сравнивают три предиктора: игнорирующий режимы, дополняющий признаки оценками вероятностей режимов из первой задачи, и идеализированный «оракул», который знает истинный режим. В их базовой конфигурации подача предсказанных режимов даёт лишь скромное и не полностью стабильное улучшение по сравнению с исходной моделью. Напротив, предиктор-оракул демонстрирует заметно лучшую работу, особенно по вероятностным метрикам, что показывает: идеальное знание режимов дало бы существенное преимущество, которое современные классификаторы реализуют лишь частично. Наконец, авторы используют декодированную последовательность режимов, чтобы оценить, как часто система остаётся в том же режиме или переключается, и вычислить соответствующие долгосрочные частоты режимов и скорость смешивания. Несмотря на отдельные ошибочные классификации, восстановленная матрица переходов, стационарное распределение и спектральный разрыв близки к тем, что получаются от истинной среды, хотя наблюдается систематическое небольшое занижение устойчивости режимов.
Что это значит для поиска скрытой структуры в шумных системах
В целом исследование демонстрирует, что на вид простое случайное блуждание, управляемое небольшой скрытой марковской средой, представляет собой чистую тестовую площадку для связывания строгой теории вероятностей с практическим машинным обучением. При мягких условиях объединённая система устанавливает стабильное долгосрочное поведение, и скрытые режимы оставляют обнаружимый след в коротких окнах движения агента. Стандартные классификаторы с базовыми признаками способны надёжно выявлять эти режимы и даже восстанавливать грубые свойства динамики невидимой среды по одной длинной траектории. В то же время скромные улучшения в краткосрочном прогнозировании при использовании несовершенных оценок режимов подчёркивают разрыв между потенциальной пользой и тем, что современные методы извлекают из конечного объёма данных. Этот разрыв и ясная связь между вероятностной структурой и обучаемостью указывают путь к более богатым моделям и инструментам выводов для обнаружения скрытых драйверов в шумных временных рядах.
Цитирование: Pambukyan, A., Saudagar, A.K.J. & Kumar, S. Ergodicity and regime recoverability in finite Markov-modulated random walks. Sci Rep 16, 12376 (2026). https://doi.org/10.1038/s41598-026-45019-w
Ключевые слова: Случайное блуждание с марковским модулем, скрытые режимы, эргодические цепи Маркова, классификация временных рядов, скрытые модели Маркова