Clear Sky Science · he
ארגודיות ויכולת שיקום משטרים בהליכות רנדומליות מוּדלות על-ידי מרקוב סופיות
מדוע דפוסים נסתרים בתנועה רנדומלית חשובים
מערכות רבות סביבנו נראות כמו רעש טהור: מחירי מניות המתגנבּים מעלה ומטה, חלקיקים המתנגשים בנוזל, או חבילות נתונים הקופצות ברשת. לעתים קרובות התנועות הרועשות הללו מוניעות על ידי כוחות איטיים בלתי נראים או "משטרים" שמשנים באיטיות את דפוסי התנועה. מאמר זה חוקר גרסה פשוטה אך חזקה של הרעיון: הולך אקראי הנע על קו קצר, בעוד שסביבה בלתי נראית מחליפה בין כמה מצבים שמשנים את התנהגות ההולך. המחברים מראים, ראשית, כיצד לתאר את המערכת הזאת באופן מדויק באמצעות תורת ההסתברות, ולאחר מכן עד כמה כלים סטנדרטיים של למידת מכונה יכולים לגלות את המשטרים הנסתרים רק מתוך צפייה במסלול ההולך.
כיצד הולך מרגיש סביבה בלתי נראית
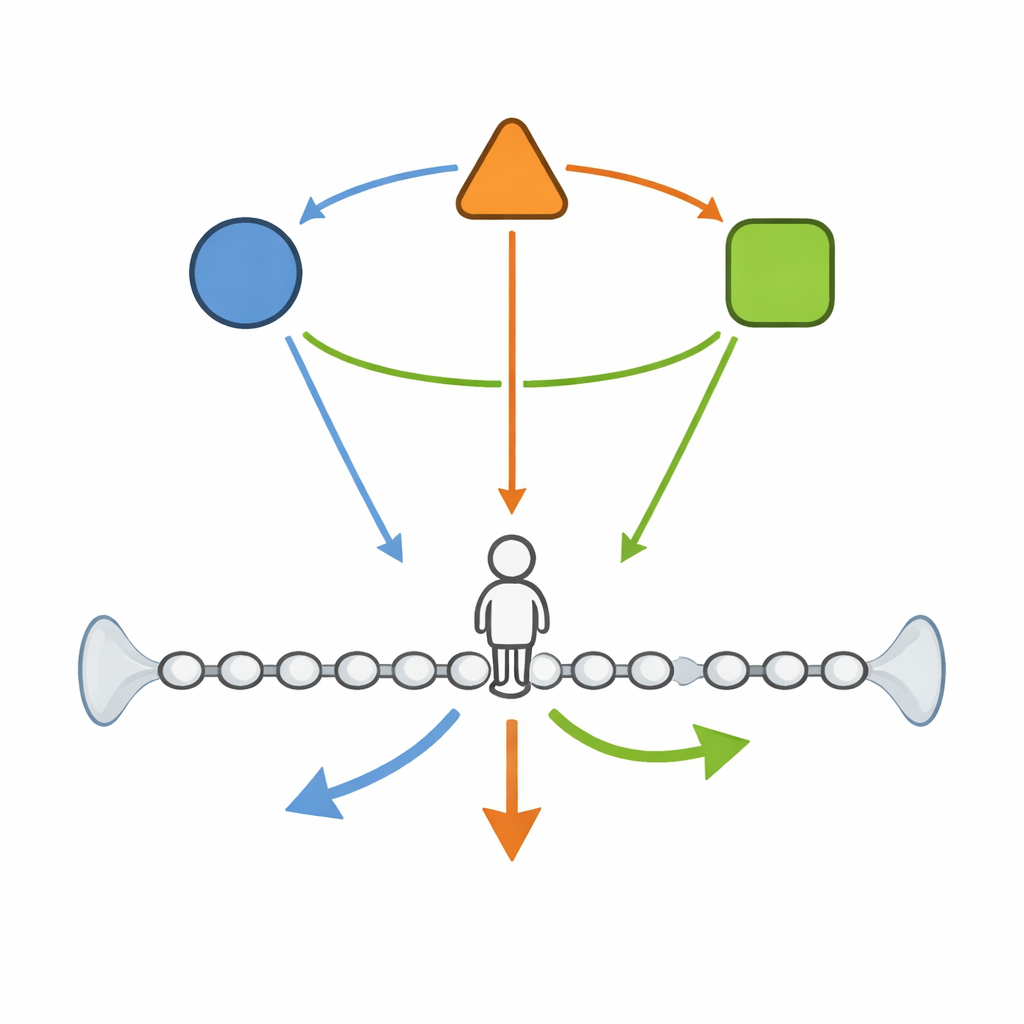
נקודת המוצא היא הולך שמתקיים על מצע חד-ממדי סופי, שורה של אתרים מקצה אחד למשנהו עם קירות מחזירים כך שלא יכול לברוח. בכל צעד בזמן ההולך יכול לזוז שמאלה, ימינה, או להישאר במקום. מה שחשוב הוא שההסתברויות לזוז שמאלה או ימינה אינן קבועות: הן תלויות ב"סביבה" בלתי נראית שמקפצת בעצמה בין כמה מצבים לפי חוקים מרקוביים משלה. כאשר הסביבה נמצאת במצב אחד, ההולך עשוי להיות מוטה לנטייה ימינה; במצב אחר הוא עשוי להעדיף לצעוד שמאלה או להישאר יותר פעמים. מתמטית, המערכת המשותפת של המיקום והסביבה יוצרת שרשרת מרקוב משותפת על מרחב מצבים סופי, והמחברים מפרטים את כל חוקי המעבר ומשוואת מאסטר בדיסקרט-זמן שמתארת כיצד ההסתברויות מתפתחות עם הזמן.
הבטחת יציבות ארוכת טווח ותמיסה
מכיוון שההולך והסביבה מפעילים השפעות הדדיות, אפשר לחשוש שהמערכת עלולה להיתקע או להתנהג באופן לא סדיר. המחברים מזהים תנאים מבניים פשוטים שמונעים זאת. הם דורשים שהסביבה יכול להגיע בסופו של דבר לכל אחד ממצביה מכל מצב אחר ויש לה סיכוי להישאר במקום, וכן שבכל משטר ההולך יכול לנוע שמאלה וימינה לאורך הקו, עם לפחות מהלך אחד של "להישאר במקום" במערכת המשותפת. תחת הנחות טבעיות אלה נכנסת לתוקף תורת שרשראות המרקוב הסופיות הסטנדרטית: התהליך המשותף אינו ניתן לפירוק ואין לו תקופות, ישנה התפלגות סטציונרית ארוכת-טווח ייחודית, והתנהגות המערכת מתכנסת להתפלגות זו ככל שהזמן מתקדם. תוצאת הארגודיות הזאת מצדיקה לטפל בנתיבים מדומיינים ארוכים כאילו נוצרו ממערכת יציבה וטובה-מעורבבת בעת הזנתם לאלגוריתמי למידה.
להנחיל למכונות לקרוא את המשטרים הנסתרים
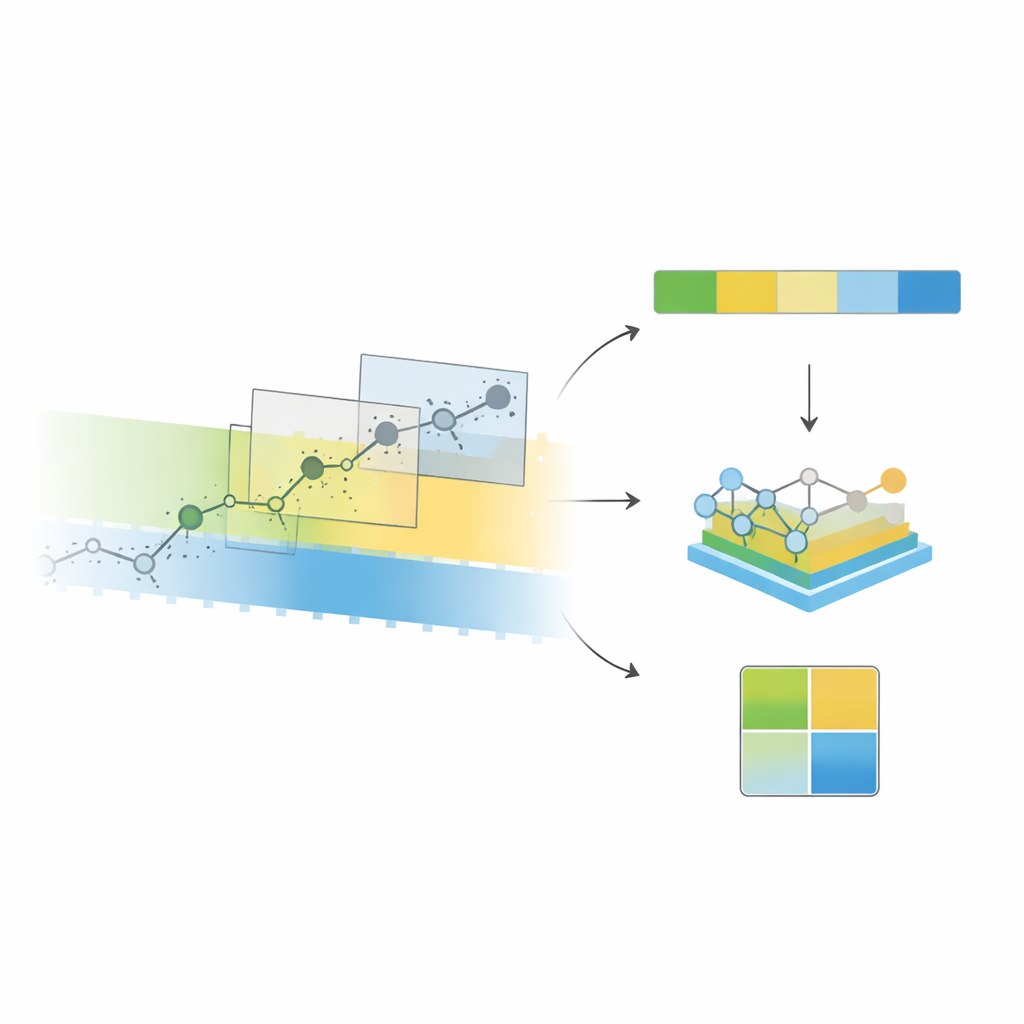
על גבי שלד הסתברותי זה, המחברים מתייחסים להולך המדומיין כמקור נתונים ללמידה מונחית. הם חותכים את רצף האינקרמנטים של ההולך (סדרת התנועות הקטנות) לחלונות חופפים והופכים כל חלון לתכונות סיכום פשוטות: ממוצעים ושונות של הצעדים, תדירות הצעדים החיוביים או האפסיים, תלות קצרת-טווח, ותיאורי יסוד של כמה הצעדים האחרונים. לכל חלון מצורפות שתי תוויות: מצב הסביבה בסוף החלון וסימן הצעד הבא. בעזרת תכונות נמוכות-רמה אלה בלבד, מסווגים מוכנים לשימוש כמו מכונות וקטור תמיכה, יער אקראי, ומכונות גרדיאנט בוסטינג יכולים לשחזר את הסביבה הנסתרת בצורה מפתיעה בטובה בתצורה של שני משטרים, עם דיוק וציון F1 מאוזן קרובים ל-0.9. מודל מרקובי נסתר מבוסס הסתברות שמורשה להשתמש בפרמטרי המדמה האמיתיים אך רואה רק את אותו חלון מקומי מספק נקודת ייחוס שימושית ומניב ביצועי גילוי משטרים השוואתיים.
חיזוי הצעד הבא ושחזור הסביבה
המחברים לאחר מכן שואלים האם ידיעה או ניחוש של המשטר הנוכחי מסייעים לחזות את הצעד הבא של ההולך. הם משווים בין שלושה מנחשים: אחד שמתעלם ממשטרים, אחד שמרחיב את התכונות עם הסתברויות משטר מוערכות מהמשימה הראשונה, ו"אורקל" אידיאלִי שרואה את המשטר האמיתי. בקונפיגורציה הברירת-מחדל שלהם, הזנת משטרים חזויים מובילה לשיפורים מתונים ולא תמיד יציבים על פני הבסיס. לעומת זאת, מנחש האורקל מבצע טוב יותר באופן ברור, במיוחד בציוני הסתברות, ומשם ניכר שידע משטר מושלם היה מציע רווחי חיזוי משמעותיים שאלגוריתמים נוכחיים מממשים רק חלקית. לבסוף, המחברים משתמשים ברצף הסביבה שפוענח כדי לאמוד כמה פעמים המערכת נשארת באותו משטר או עוברת, ולחשב את תדירות המשטרים ארוכת-הטווח המושמעות ומהירויות התמיסה. למרות שגיאות סיווג פרטניות, מטריצת המעברים ששוחזרה, ההתפלגות הסטציונרית והרווח הספקטרלי קרובים לאלה הנגזרים מהסביבה האמיתית, אם כי קיימת הערכה שיטתית מעטה מדי של ההתמדה במשטרים.
ממה זה מלמד על מציאת מבנה חבוי במערכות רועשות
בסך הכל, המחקר מראה שהליכה אקראית שנראית פשוטה, כאשר היא מונעת על-ידי סביבה מרקובית קטנה ונסתּרת, מהווה סביבת מבחן נקייה לחיבור בין הסתברות מוקפדת ולמידת מכונה מעשית. תחת תנאים מתונים, המערכת המשותפת מתייצבת להתנהגות ארוכת-טווח יציבה, והמשטרים הנסתרים משאירים טביעת אצבע שניתן לזהותה בחלונות קצרים של תנועת ההולך. מסווגים סטנדרטיים המשתמשים בתכונות בסיסיות יכולים לחשוף את המשטרים באופן מהימן ואפילו לשחזר תכונות גסות של הדינמיקה של הסביבה הבלתי נראית מתוך מסלול ארוך יחיד. באותו זמן, שיפורי החיזוי המזעריים בטווח הקרוב בעת שימוש בהערכות משטר לא מושלמות מדגישים את הפער בין הערך "עקרוני" לבין מה ששיטות נוכחיות מפיקות מנתונים סופיים. הפער הזה, והקשר הברור בין מבנה הסתברותי ולמידה, מצביעים על דרכים לפיתוח מודלים וכלי הסקה עשירים יותר לחשיפת כוחות חבויים בסדרות זמן רועשות.
ציטוט: Pambukyan, A., Saudagar, A.K.J. & Kumar, S. Ergodicity and regime recoverability in finite Markov-modulated random walks. Sci Rep 16, 12376 (2026). https://doi.org/10.1038/s41598-026-45019-w
מילות מפתח: הליכה אקראית מוּדלת על-ידי מרקוב, משטרים נסתרים, שרשראות מרקוב ארגודיות, מיון סדרות בזמן, מודלים מרקוביים נסתרים