Clear Sky Science · pl
Ergodyczność i odtwarzalność reżimów w skończonych Markowowsko-modulowanych procesach losowych
Dlaczego ukryte wzorce w ruchu losowym są ważne
Wiele systemów wokół nas wygląda jak czysty szum: ceny akcji falujące w górę i w dół, cząstki tłoczące się w płynie czy pakiety danych skaczące po sieci. Jednak te hałaśliwe ruchy często są kierowane przez wolne, niewidoczne siły lub „reżimy”, które powoli zmieniają sposób, w jaki przebiega ruch. Artykuł bada prostą, ale silną wersję tego pomysłu: wędrowca poruszającego się tam i z powrotem po krótkiej linii, podczas gdy niewidzialne środowisko przełącza się między kilkoma trybami wpływającymi na zachowanie wędrowca. Autorzy pokazują najpierw, jak opisać ten system w przejrzysty sposób za pomocą teorii prawdopodobieństwa, a następnie, jak daleko sięgają standardowe narzędzia uczenia maszynowego w odkrywaniu ukrytych reżimów jedynie na podstawie obserwowanej ścieżki wędrowca.
Jak wędrowiec odczuwa niewidzialne środowisko
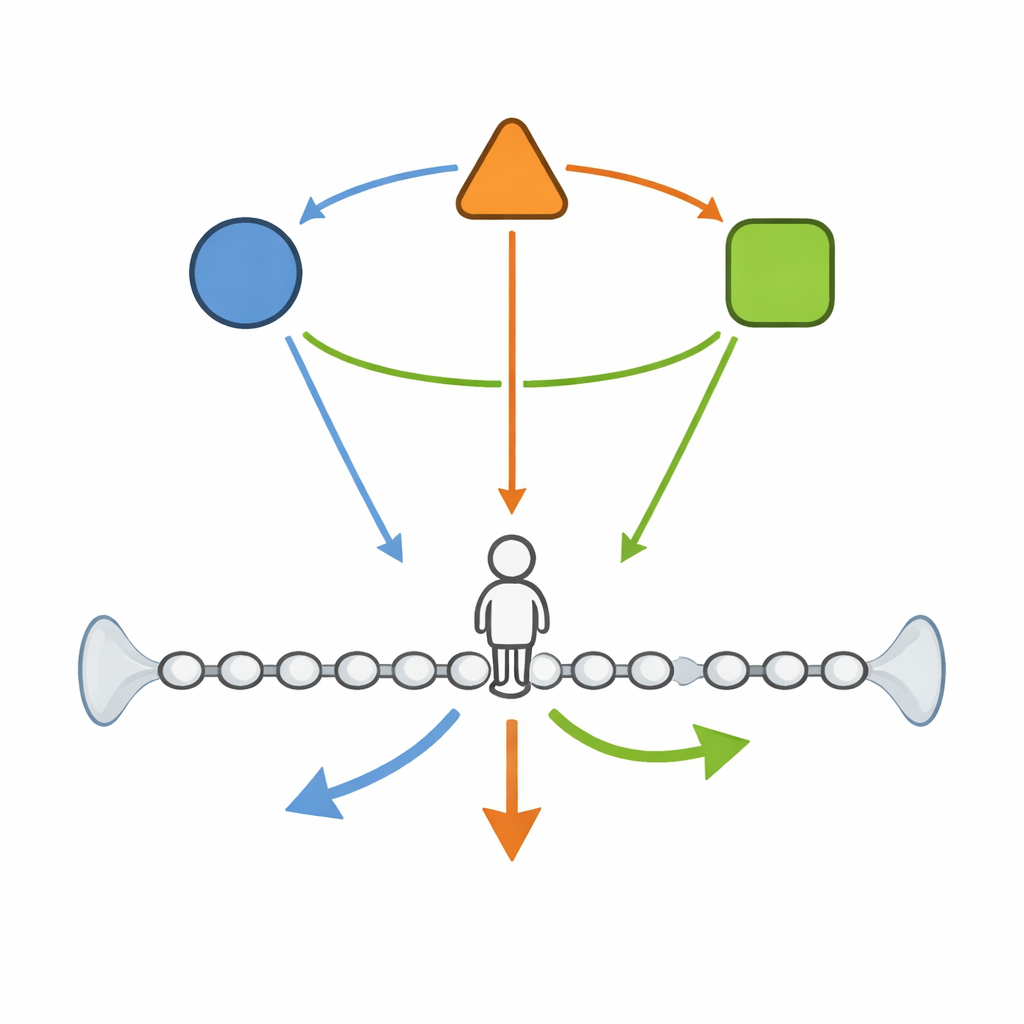
Punktem wyjścia jest wędrowiec żyjący na skończonej jednowymiarowej sieci, szeregu miejsc od jednego końca do drugiego z odbijającymi ścianami, tak że nie może uciec. W każdym kroku czasowym wędrowiec może pójść w lewo, w prawo lub pozostać w miejscu. Kluczowe jest to, że szanse pójścia w lewo lub w prawo nie są stałe: zależą od niewidzialnego „środowiska”, które samo przeskakuje między kilkoma stanami według własnych reguł Markowa. Gdy środowisko jest w jednym stanie, wędrowiec może mieć tendencję do dryfu w prawo; w innym może preferować krok w lewo lub częstsze zatrzymywanie się. Matematycznie pozycja i środowisko tworzą wspólny łańcuch Markowa na skończonej przestrzeni stanów, a autorzy zapisują pełne reguły przejść i dyskretnoczasowe równanie ewolucji opisujące, jak prawdopodobieństwa zmieniają się w czasie.
Gwarancje długoterminowej stabilności i mieszania
Ponieważ wędrowiec i środowisko oddziałują, można się obawiać, że system utknie lub zachowa się nieregularnie. Autorzy wskazują proste warunki strukturalne, które to wykluczają. Wymagają, by środowisko mogło w końcu dotrzeć do dowolnego ze swoich stanów z dowolnego innego i miało pewne prawdopodobieństwo pozostania w miejscu, oraz by w każdym reżimie wędrowiec mógł poruszać się w lewo i w prawo wzdłuż linii, przy czym w wspólnym systemie musi istnieć co najmniej jeden prawdziwy ruch „pozostań na miejscu”. Przy tych naturalnych założeniach wchodzi w grę standardowa teoria skończonych łańcuchów Markowa: proces łączny jest nieredukowalny i aperiodyczny, ma unikalne rozkłady stacjonarne w długim okresie, a zachowanie łączne zbiega do tego rozkładu w miarę upływu czasu. Ten wynik o ergodyczności uzasadnia traktowanie długich symulowanych ścieżek jakby były generowane przez stabilny, dobrze wymieszany system przy wprowadzaniu ich do algorytmów uczących się.
Nauczanie maszyn rozpoznawania ukrytych reżimów
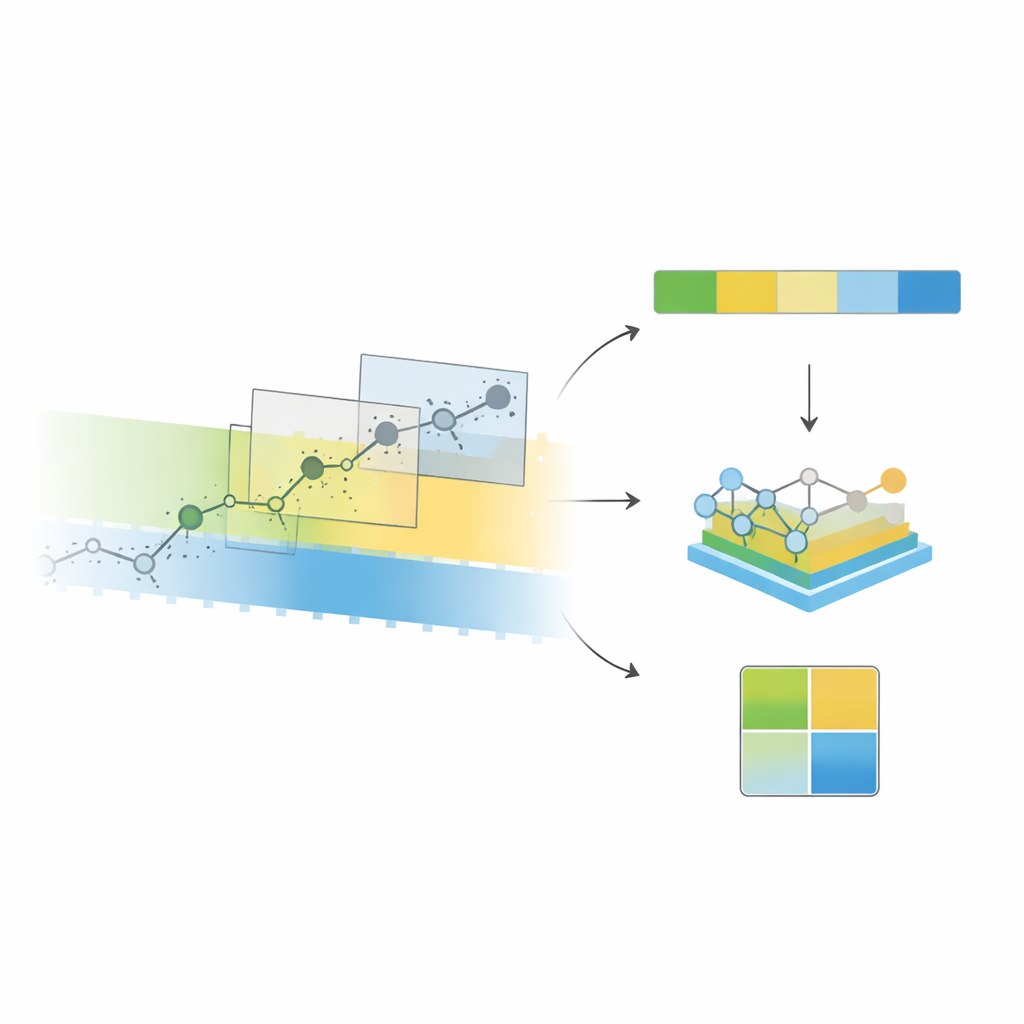
Na bazie tego probabilistycznego kręgosłupa autorzy traktują symulowanego wędrowca jako źródło danych do uczenia nadzorowanego. Dzielą sekwencję przyrostów wędrowca (następstwo małych ruchów) na nakładające się okna i przekształcają każde okno w proste cechy-sumary: średnie i zmienność kroków, jak często są dodatnie lub zerowe, krótkookresowe zależności oraz podstawowe opisy ostatnich kilku ruchów. Każde okno otrzymuje dwie etykiety: stan środowiska na końcu okna oraz znak następnego kroku. Używając tylko tych niskopoziomowych cech, standardowe klasyfikatory dostępne „z pudełka”, takie jak maszyny wektorów nośnych, lasy losowe czy gradient boosting, potrafią zaskakująco dobrze odzyskać ukryte środowisko w konfiguracji z dwoma reżimami, osiągając dokładność i zrównoważone F1 bliskie 0,9. Model ukrytego Markowa oparty na maksymalnym prawdopodobieństwie, któremu pozwolono użyć prawdziwych parametrów symulatora, ale mającemu do dyspozycji tylko te same lokalne okna, dostarcza użytecznego punktu odniesienia i daje porównywalne wyniki wykrywania reżimów.
Przewidywanie następnego kroku i rekonstrukcja środowiska
Autorzy następnie pytają, czy znajomość lub odgadnięcie bieżącego reżimu pomaga przewidzieć następny ruch wędrowca. Porównują trzy predyktory: jeden ignorujący reżimy, drugi rozszerzający cechy o szacowane prawdopodobieństwa reżimów z pierwszego zadania, oraz idealizowany „wyrocznia”, która widzi prawdziwy reżim. W konfiguracji domyślnej podawanie przewidywanych reżimów prowadzi do jedynie umiarkowanych i nie w pełni stabilnych ulepszeń względem bazowego modelu. Natomiast predyktor-wyrocznia wypada wyraźnie lepiej, szczególnie w ocenie probabilistycznej, co ujawnia, że perfekcyjna znajomość reżimu przyniosłaby znaczące zyski predykcyjne, które obecne klasyfikatory realizują tylko częściowo. Wreszcie autorzy używają odszyfrowanej sekwencji środowiska do oszacowania, jak często system pozostaje w tym samym reżimie lub się przełącza, oraz do obliczenia implikowanych długoterminowych częstości reżimów i szybkości mieszania. Mimo pojedynczych błędów klasyfikacji zrekonstruowana macierz przejść, rozkład stacjonarny i luka spektralna są bliskie tym wyprowadzonym z prawdziwego środowiska, chociaż obserwuje się systematyczne, nieznaczne niedoszacowanie utrzymywania się reżimów.
Co to znaczy dla wykrywania ukrytej struktury w hałaśliwych systemach
Podsumowując, badanie pokazuje, że pozornie prosty spacer losowy, napędzany przez małe ukryte środowisko Markowa, stanowi czyste pole testowe dla łączenia ścisłej probabilistyki z praktycznym uczeniem maszynowym. Przy łagodnych warunkach system łączny układa się w stabilne długookresowe zachowanie, a ukryte reżimy pozostawiają wykrywalny odcisk w krótkich oknach ruchu wędrowca. Standardowe klasyfikatory wykorzystujące podstawowe cechy mogą wiarygodnie ujawnić te reżimy i nawet odtworzyć przybliżone własności dynamiki niewidzialnego środowiska na podstawie pojedynczej długiej trajektorii. Równocześnie umiarkowane zyski w krótkoterminowym przewidywaniu przy użyciu niedoskonałych estymat reżimów uwypuklają lukę między wartością „w zasadzie” a tym, co współczesne metody potrafią wydobyć z skończonych danych. Ta luka oraz wyraźne powiązanie między strukturą probabilistyczną a uczalnością wskazują kierunek dla bogatszych modeli i narzędzi inferencyjnych do odkrywania ukrytych czynników w hałaśliwych szeregach czasowych.
Cytowanie: Pambukyan, A., Saudagar, A.K.J. & Kumar, S. Ergodicity and regime recoverability in finite Markov-modulated random walks. Sci Rep 16, 12376 (2026). https://doi.org/10.1038/s41598-026-45019-w
Słowa kluczowe: Markowowsko-modulowany proces losowy, ukryte reżimy, ergodyczne łańcuchy Markowa, klasyfikacja szeregów czasowych, ukryte modele Markowa