Clear Sky Science · fr
Ergodicité et récupérabilité des régimes dans les marches aléatoires modulées par une chaîne de Markov finie
Pourquoi les motifs cachés dans le mouvement aléatoire comptent
Beaucoup de systèmes autour de nous ressemblent à du bruit pur : les cours boursiers qui oscillent, les particules qui s’entrechoquent dans un fluide, ou les paquets de données qui sautent à travers un réseau. Pourtant, ces mouvements bruyants sont souvent pilotés par des forces lentes et invisibles, ou des « régimes », qui modifient discrètement la façon dont le mouvement se déroule. Cet article étudie une version simple mais puissante de cette idée : un marcheur aléatoire qui se déplace d’avant en arrière sur une courte ligne, tandis qu’un environnement caché bascule entre quelques modes qui changent le comportement du marcheur. Les auteurs montrent, d’abord, comment décrire proprement ce système avec la théorie des probabilités, puis jusqu’où des outils classiques d’apprentissage automatique peuvent découvrir les régimes cachés en ne regardant que la trajectoire du marcheur.
Comment un marcheur ressent un environnement invisible
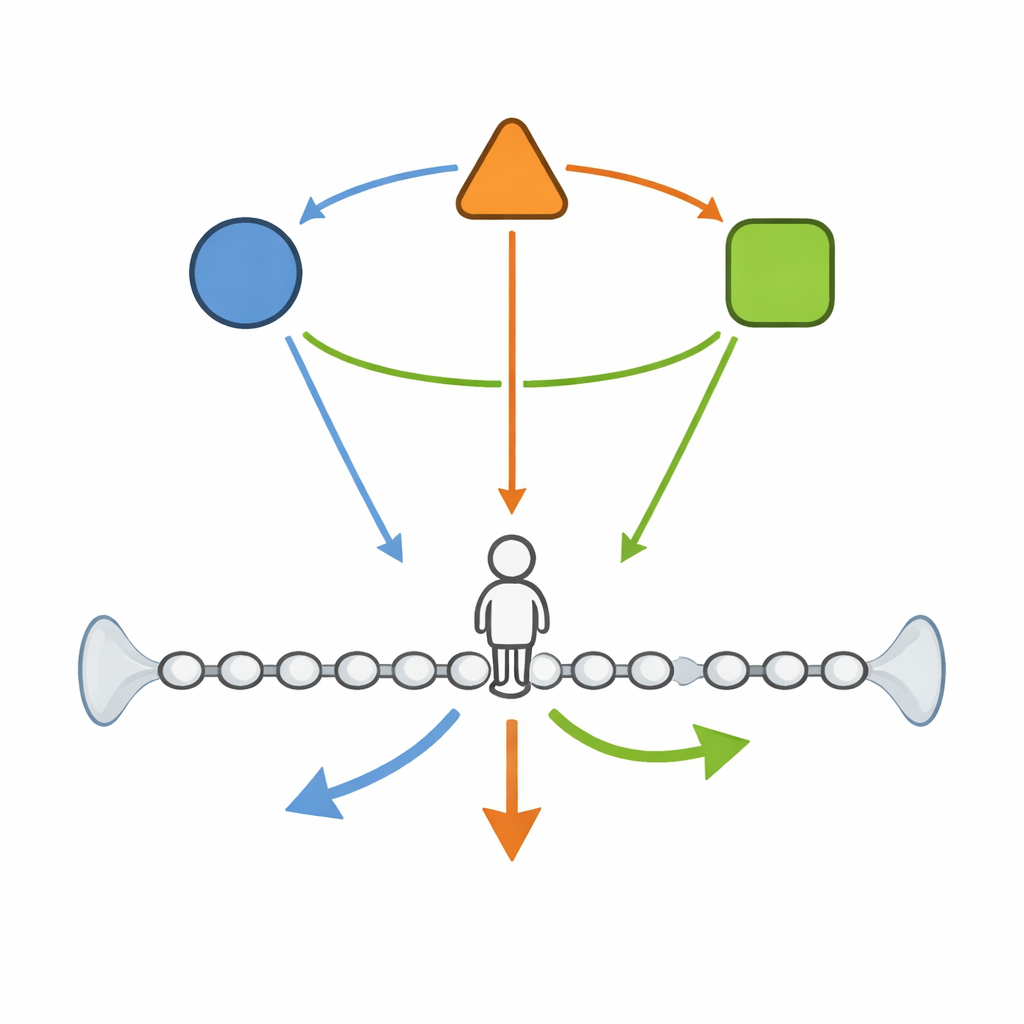
Le point de départ est un marcheur situé sur un réseau unidimensionnel fini, une rangée de sites encadrée par des parois réfléchissantes qui l’empêchent de s’échapper. À chaque pas de temps, le marcheur peut aller à gauche, à droite ou rester sur place. De façon cruciale, les probabilités d’aller à gauche ou à droite ne sont pas fixes : elles dépendent d’un « environnement » invisible qui lui-même saute entre quelques états selon des règles markoviennes. Quand l’environnement est dans un état, le marcheur peut avoir une tendance à dériver vers la droite ; dans un autre état, il peut préférer aller à gauche ou rester immobile plus souvent. Mathématiquement, le système combiné position–environnement forme une chaîne de Markov conjointe sur un espace d’états fini, et les auteurs écrivent ses règles de transition complètes ainsi qu’une équation maîtresse en temps discret décrivant l’évolution des probabilités au fil du temps.
Garantir la stabilité à long terme et le mélange
Parce que le marcheur et l’environnement interagissent, on peut craindre que le système se bloque ou se comporte de façon irrégulière. Les auteurs identifient des conditions structurelles simples qui écartent cette possibilité. Ils exigent que l’environnement puisse éventuellement atteindre n’importe lequel de ses états à partir de n’importe quel autre et ait une certaine probabilité de rester dans son état, et que dans chaque régime le marcheur puisse se déplacer à gauche et à droite le long de la ligne, avec au moins un véritable mouvement « rester sur place » disponible dans le système conjoint. Sous ces hypothèses naturelles, la théorie standard des chaînes de Markov finies s’applique : le processus combiné est irréductible et apériodique, possède une unique distribution stationnaire à long terme, et le comportement conjoint converge vers cette distribution au fil du temps. Ce résultat d’ergodicité justifie de traiter de longues trajectoires simulées comme si elles étaient générées par un système stable et bien mélangé lorsqu’on les fournit à des algorithmes d’apprentissage.
Apprendre aux machines à lire les régimes cachés
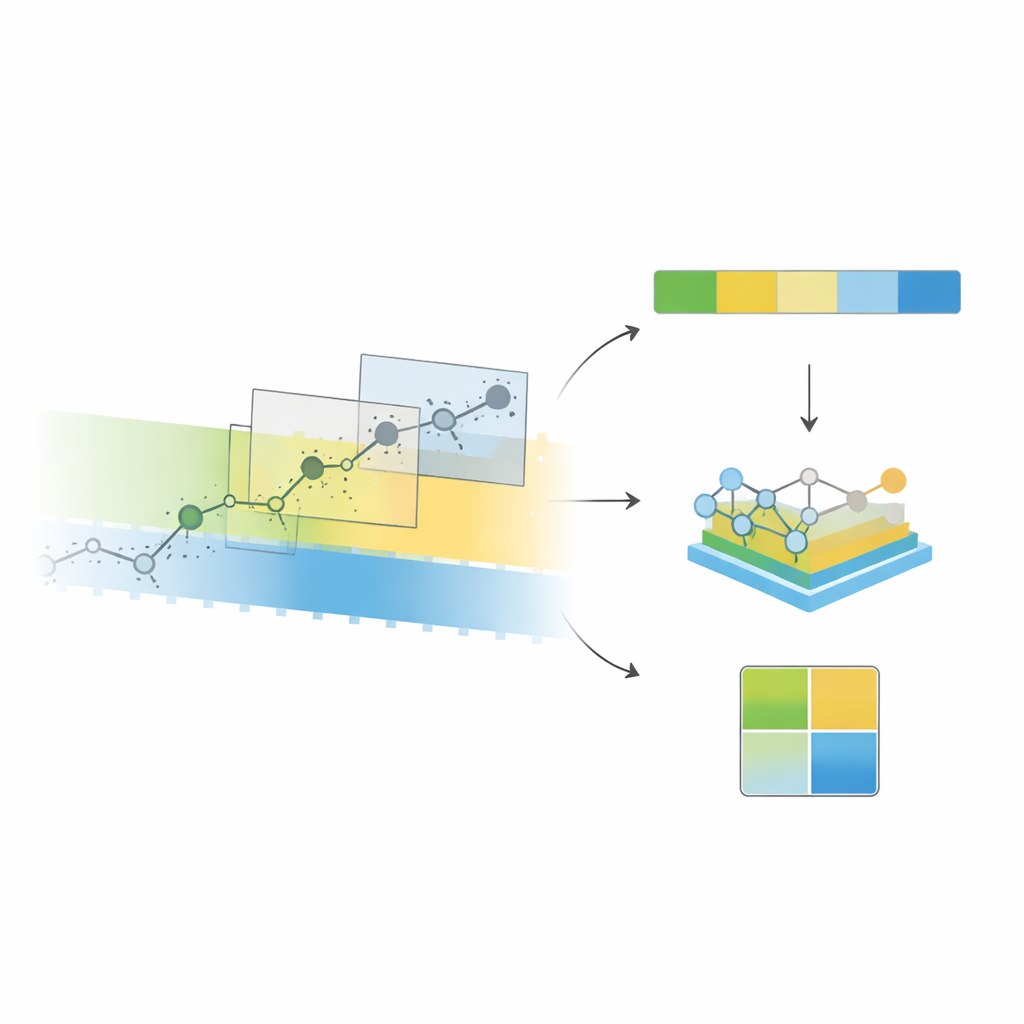
Sur cette base probabiliste, les auteurs considèrent le marcheur simulé comme une source de données pour l’apprentissage supervisé. Ils découpent la suite des incréments du marcheur (la succession de petits déplacements) en fenêtres chevauchantes et transforment chaque fenêtre en caractéristiques sommaires simples : moyennes et variabilité des pas, fréquence des pas positifs ou nuls, dépendance à court terme, et des descripteurs basiques des derniers mouvements. Chaque fenêtre reçoit deux étiquettes : l’état de l’environnement à la fin de la fenêtre, et le signe du pas suivant. En n’utilisant que ces caractéristiques élémentaires, des classifieurs standard prêts à l’emploi, tels que machines à vecteurs de support, forêts aléatoires et gradient boosting, parviennent à retrouver les régimes cachés de façon surprenante dans le cas à deux régimes, avec des scores d’exactitude et des F1 équilibrés proches de 0,9. Un modèle de Markov caché basé sur la vraisemblance, autorisé à utiliser les véritables paramètres du simulateur mais uniquement les mêmes fenêtres locales, sert de référence utile et fournit des performances comparables en détection des régimes.
Prédire le pas suivant et reconstruire l’environnement
Les auteurs examinent ensuite si connaître, ou deviner, le régime courant aide à prédire le pas suivant du marcheur. Ils comparent trois prédicteurs : l’un qui ignore les régimes, un autre qui enrichit les caractéristiques par des probabilités de régime estimées à partir de la première tâche, et un « oracle » idéalisé qui voit le régime réel. Dans la configuration par défaut, l’introduction de régimes prédits n’apporte que des améliorations modestes et pas entièrement stables par rapport au modèle de base. En revanche, le prédicteur oracle fait clairement mieux, notamment pour les scores probabilistes, ce qui révèle qu’une connaissance parfaite des régimes offrirait des gains prédictifs substantiels que les classifieurs actuels réalisent seulement partiellement. Enfin, les auteurs utilisent la séquence d’environnements décodée pour estimer la fréquence de maintien dans un même régime ou de basculement, et pour calculer les fréquences de régime à long terme et les vitesses de mélange implicites. Malgré des erreurs de classification individuelles, la matrice de transition reconstruite, la distribution stationnaire et le gap spectral sont proches de ceux issus de l’environnement réel, bien qu’il y ait une sous-estimation systématique légère de la persistance des régimes.
Ce que cela implique pour la détection de structure cachée dans des systèmes bruyants
Dans l’ensemble, l’étude montre qu’une marche aléatoire apparemment simple, lorsqu’elle est pilotée par un petit environnement de Markov caché, offre un banc d’essai clair pour relier une probabilité rigoureuse à l’apprentissage automatique pratique. Sous des conditions légères, le système conjoint s’installe dans un comportement stable à long terme, et les régimes cachés laissent une empreinte détectable dans de courtes fenêtres du mouvement du marcheur. Des classifieurs standard utilisant des caractéristiques basiques peuvent découvrir ces régimes de façon fiable et même récupérer des propriétés grossières de la dynamique de l’environnement invisible à partir d’une seule longue trajectoire. En même temps, les gains modestes en prédiction à court terme lorsqu’on utilise des estimations imparfaites de régime mettent en lumière l’écart entre la valeur « en principe » et ce que les méthodes actuelles extraient de données finies. Cet écart, et le lien net entre structure probabiliste et observabilité par apprentissage, ouvre la voie à des modèles et des outils d’inférence plus riches pour mettre au jour les moteurs cachés dans des séries temporelles bruitées.
Citation: Pambukyan, A., Saudagar, A.K.J. & Kumar, S. Ergodicity and regime recoverability in finite Markov-modulated random walks. Sci Rep 16, 12376 (2026). https://doi.org/10.1038/s41598-026-45019-w
Mots-clés: marche aléatoire modulée par Markov, régimes cachés, chaînes de Markov ergodiques, classification de séries temporelles, modèles de Markov cachés