Clear Sky Science · ar
الإرجودية وإمكانية استعادة الأنماط في المسيرات العشوائية المعدّلة بماركوف النهائية
لماذا تهم الأنماط الخفية في الحركة العشوائية
تبدو العديد من الأنظمة من حولنا كضوضاء محضة: أسعار الأسهم تتذبذب صعودًا وهبوطًا، جسيمات تتصادم في سائل، أو حزم بيانات تقفز عبر شبكة. ومع ذلك تُوجَّه هذه الحركات الصاخبة غالبًا بقوى بطيئة غير مرئية أو "حالات" تتغير بهدوء وتغيّر كيفية تطور الحركة. تدرس هذه الورقة نسخة بسيطة لكنها قوية من هذه الفكرة: متجوّل عشوائي يتحرك ذهابًا وإيابًا على خط قصير، بينما يبدّل بيئة غير مرئية بين عدة أوضاع تغيّر سلوك المتجوّل. يبيّن المؤلفون، أولًا، كيف يمكن وصف هذا النظام بشكل واضح باستخدام نظرية الاحتمالات، ثم إلى أي مدى يمكن للأدوات القياسية في تعلّم الآلة كشف الحالات الخفية من خلال مراقبة مسار المتجوّل فقط.
كيف يشعر المتجوّل بالبيئة غير المرئية
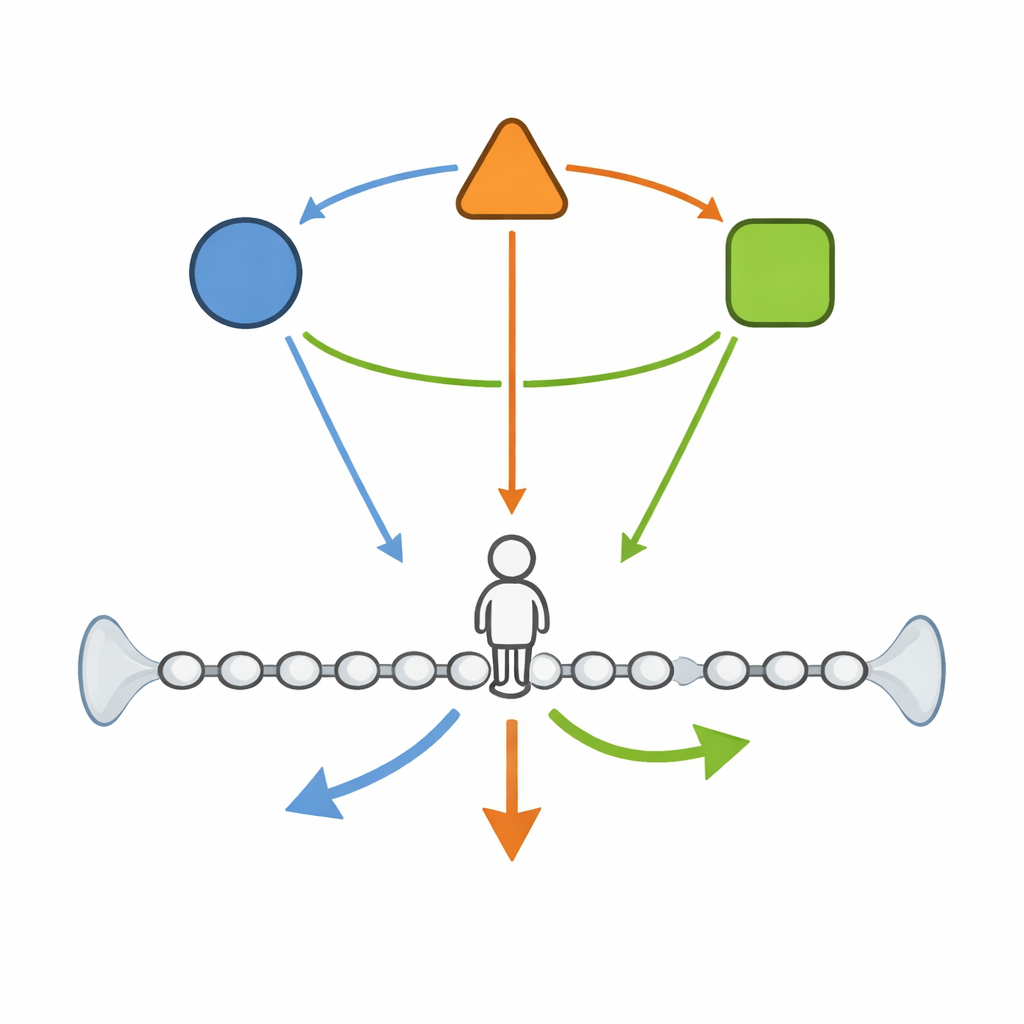
النقطة الانطلاق هي متجوّل يعيش على شبكة أحادية الأبعاد منتهية، صف من المواقع من طرف إلى آخر مع حوائط عاكسة فلا يمكنه الفرار. في كل خطوة زمنية يمكن للمتجوّل التحرك يسارًا أو يمينًا أو البقاء في مكانه. والأهم أن احتمالات الذهاب يسارًا أو يمينًا ليست ثابتة: فهي تعتمد على "البيئة" غير المرئية التي تقفز بدورها بين عدد من الحالات وفق قواعد ماركوفية. عندما تكون البيئة في حالة ما قد يكون لدى المتجوّل انحياز للانجراف نحو اليمين؛ وفي حالة أخرى قد يفضّل التحرك يسارًا أو التوقف أكثر. رياضيًا، يُشكّل النظام المدمج للموقع والبيئة سلسلة ماركوف مشتركة على فضاء حالات محدود، ويكتب المؤلفون قواعد الانتقال الكاملة ومعادلة ماستر زمنية منفصلة تصف كيف تتطور الاحتمالات مع الزمن.
ضمان الاستقرار والخلط على المدى الطويل
نظرًا لتفاعل المتجوّل والبيئة، قد يخشى المرء أن النظام قد يعلق أو يتصرف بشكل غير منتظم. يحدد المؤلفون شروطًا تركيبية بسيطة تستبعد ذلك. يشترطون أن البيئة يمكنها في نهاية المطاف الوصول إلى أي من حالاتِها من أي حالة أخرى وأن لديها فرصة للبقاء في مكانها، وأنه في كل نظام فرعي يمكن للمتجوّل التحرك يسارًا ويمينًا على طول الخط، مع وجود على الأقل حركة حقيقية واحدة من نوع "ابقَ في مكانك" متاحة في النظام المشترك. بموجب هذه الفرضيات الطبيعية، تنطبق نظرية سلاسل ماركوف النهائية القياسية: العملية المشتركة غير قابلة للتفكيك ولا دورية، لها توزيع مستقر فريد على المدى الطويل، ويتقارب السلوك المشترك إلى هذا التوزيع مع تقدم الزمن. يبرّر هذا النتيجة الإرجودية التعامل مع مسارات محاكاة طويلة كما لو أنها مولَّدة من نظام مستقر وممتزج جيدًا عند إدخالها في خوارزميات التعلم.
تعليم الآلات قراءة الحالات الخفية
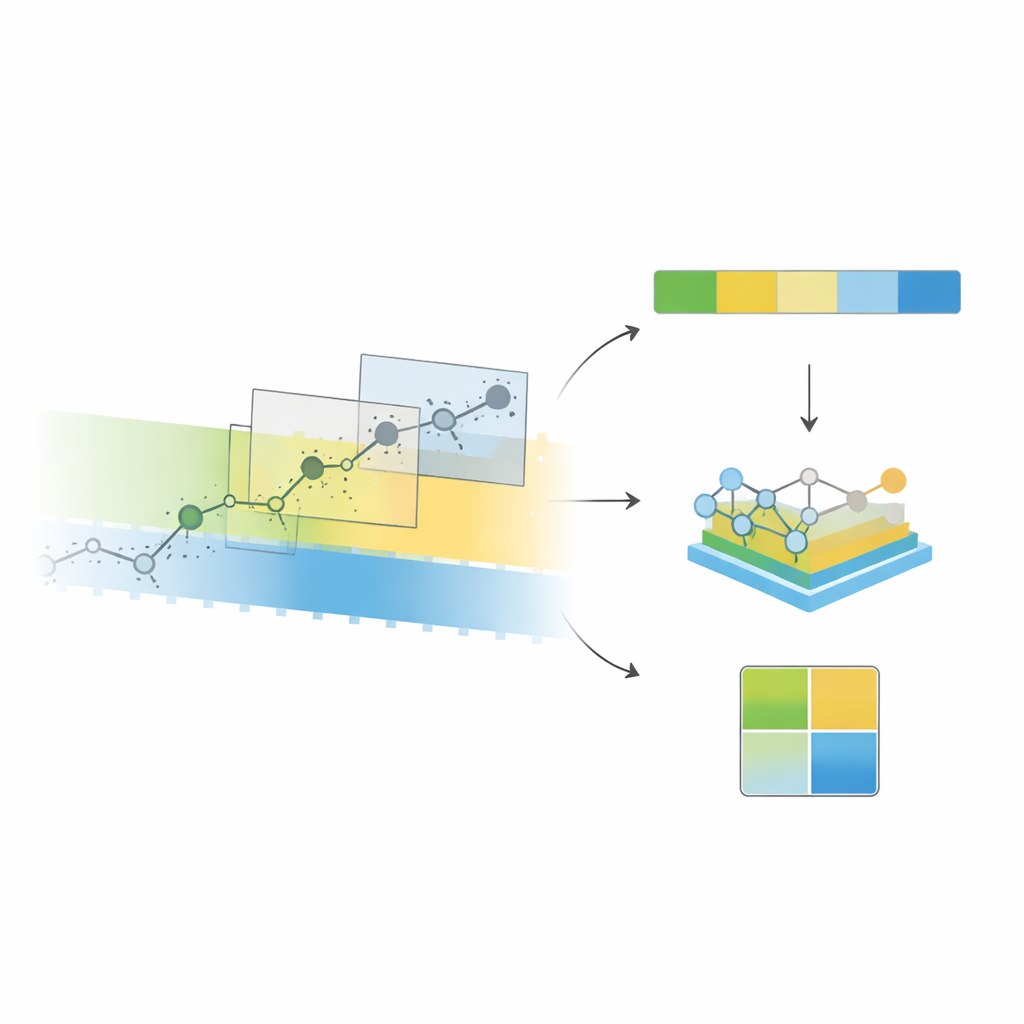
فوق هذا العمود الفقري الاحتمالي، يعتبر المؤلفون المتجوّل المحاكى كمصدر بيانات للتعلّم المراقَب. يقسمون سلسلة فروق المتجوّل (تتابع الحركات الصغيرة) إلى نوافذ متداخلة ويحوّلون كل نافذة إلى ميزات ملخّصة بسيطة: المتوسطات والمتغيّرة للخطوات، عدد المرات التي تكون فيها موجبة أو صفر، الاعتماد قصير المدى، ووَصْفُ موجز لِحركاتِ الخطوات الأخيرة. كل نافذة تحصل على تسميتين: حالة البيئة في نهاية النافذة، وإشارة الخطوة التالية. باستخدام هذه الميزات البسيطة فقط، يمكن للمصنّفات الجاهزة مثل آلات المتجه الداعم، الغابات العشوائية، وآلات التعزيز التدرّجي استعادة الحالة الخفية بشكل مفاجئ في إعداد ذو حالتين، بدقة ودرجات F1 متوازنة تقارب 0.9. كما يوفر نموذج ماركوف خفي قائم على الاحتمال، ممنوحًا إياه معاملات المحاكاة الحقيقية لكنه مُقيّد بنفس النافذة المحلية، نقطة مرجعية مفيدة ويحقق أداءً قابلاً للمقارنة في كشف الحالات.
التنبؤ بالخطوة التالية وإعادة بناء البيئة
ثم يسأل المؤلفون ما إذا كانت معرفة أو تخمين الحالة الحالية يساعد في التنبؤ بتحرك المتجوّل التالي. يقارنون ثلاثة متنبئين: واحد يتجاهل الحالات، واحد يضيف إلى الميزات احتمالات الحالات المُقدَّرة من المهمة الأولى، و"أوراكل" مثالي يرى الحالة الحقيقية. في التكوين الافتراضي لديهم، يؤدي إدخال الحالات المتوقعة إلى تحسّنات متواضعة وغير مستقرّة بالكامل مقارنة بالخط الأساسي. بالمقابل، يؤدي المتنبئ الأوراكل أداءً أفضل بوضوح، خاصة في القياس الاحتمالي، مما يكشف أن معرفة الحالة الكاملة ستوفر مكاسب تنبؤية كبيرة لا تحققها المصنّفات الحالية إلا جزئيًا. أخيرًا، يستخدم المؤلفون التسلسل المُفكَّك للبيئة لتقدير كم مرة يبقى النظام في نفس الحالة أو يبدّلها، ولحساب تردّدات الحالات الطويلة الأمد وسرعات الخلط المفترضة. على الرغم من الأخطاء الفردية في التصنيف، فإن مصفوفة الانتقال المعاد بناؤها، والتوزيع المستقر، والفجوة الطيفية تقترب من تلك المستخلصة من البيئة الحقيقية، مع وجود تحيّز طفيف منهجي نحو التقليل في متانة بقاء الحالات.
ما يعنيه هذا للعثور على بنية خفية في الأنظمة الصاخبة
بشكل عام، تُظهر الدراسة أن مسيرة عشوائية تبدو بسيطة، عندما تُدار بواسطة بيئة ماركوف خفية صغيرة، تقدِّم أرضية اختبار واضحة لربط الاحتماليات الصارمة بتعلّم الآلة العملي. وفق شروط معتدلة، يستقر النظام المشترك إلى سلوك طويل الأمد مستقر، وتترك الحالات الخفية بصمة قابلة للكشف في نوافذ قصيرة من حركة المتجوّل. يمكن للمصنّفات القياسية التي تستخدم ميزات أساسية كشف هذه الحالات بشكل موثوق وحتى استرداد خصائص خشنة لديناميكيات البيئة غير المرئية من مسار طويل واحد. في الوقت نفسه، تُبرز المكاسب المتواضعة في التنبؤ قصير الأمد عند استخدام تقديرات حالات غير كاملة الفجوة بين القيمة "نظريًا" وما تستخرجه الطرق الحالية من بيانات محدودة. تشير هذه الفجوة، والرابط الواضح بين البنية الاحتمالية وقابلية التعلم، إلى طريق نحو نماذج وأدوات استدلال أغنى لكشف المحركات الخفية في السلاسل الزمنية الصاخبة.
الاستشهاد: Pambukyan, A., Saudagar, A.K.J. & Kumar, S. Ergodicity and regime recoverability in finite Markov-modulated random walks. Sci Rep 16, 12376 (2026). https://doi.org/10.1038/s41598-026-45019-w
الكلمات المفتاحية: المسيرة العشوائية المعدّلة بماركوف, الحالات الخفية, سلاسل ماركوف الإرجودية, تصنيف السلاسل الزمنية, نماذج ماركوف الخفية