Clear Sky Science · es
Ergodicidad y recuperabilidad de regímenes en paseos aleatorios modulados por Markov finitos
Por qué importan los patrones ocultos en el movimiento aleatorio
Muchos sistemas a nuestro alrededor parecen puro ruido: precios de acciones que suben y bajan, partículas que se agitan en un fluido o paquetes de datos que saltan por una red. Sin embargo, esos movimientos ruidosos suelen estar guiados por fuerzas lentas y no visibles o “regímenes” que cambian discretamente cómo se desarrolla el movimiento. Este artículo estudia una versión simple pero potente de esa idea: un caminante aleatorio que se desplaza de un extremo a otro en una línea corta, mientras un entorno invisible cambia entre unos pocos modos que alteran el comportamiento del caminante. Los autores muestran, primero, cómo describir este sistema de forma limpia con teoría de la probabilidad, y luego hasta qué punto las herramientas estándar de aprendizaje automático pueden descubrir los regímenes ocultos solo observando la trayectoria del caminante.
Cómo el caminante percibe un entorno invisible
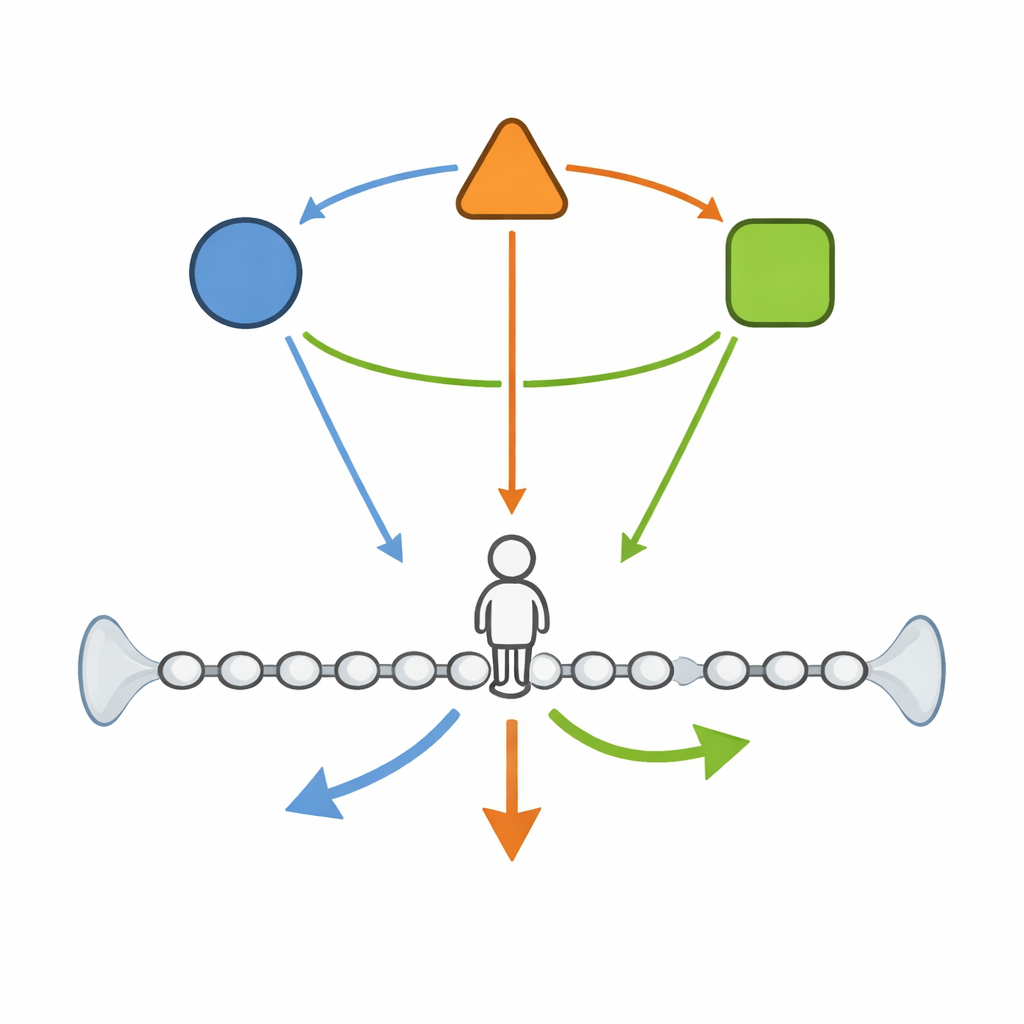
El punto de partida es un caminante que vive en una red unidimensional finita, una fila de sitios de un extremo al otro con paredes reflectantes para que no pueda escapar. En cada paso de tiempo el caminante puede moverse a la izquierda, a la derecha o quedarse en su lugar. De forma crucial, las probabilidades de ir a la izquierda o a la derecha no son fijas: dependen de un “entorno” invisible que a su vez salta entre unos pocos estados según reglas markovianas. Cuando el entorno está en un estado, el caminante puede tener sesgo a desplazarse hacia la derecha; en otro, puede preferir ir a la izquierda o quedarse quieto con más frecuencia. Matemáticamente, el sistema combinado de posición y entorno forma una cadena de Markov conjunta en un espacio de estados finito, y los autores escriben sus reglas de transición completas y una ecuación maestra en tiempo discreto que describe cómo evolucionan las probabilidades a lo largo del tiempo.
Garantizar estabilidad y mezcla a largo plazo
Porque el caminante y el entorno interactúan, uno podría temer que el sistema se quede atrapado o se comporte de forma irregular. Los autores identifican condiciones estructurales sencillas que descartan ese riesgo. Exigen que el entorno pueda eventualmente alcanzar cualquiera de sus estados desde cualquiera otro y tenga alguna probabilidad de permanecer donde está, y que en cada régimen el caminante pueda moverse a la izquierda y a la derecha a lo largo de la línea, con al menos un movimiento genuino de “quedarse” disponible en el sistema conjunto. Bajo estas suposiciones naturales, entra en juego la teoría estándar de cadenas de Markov finitas: el proceso combinado es irreducible y aperiódico, tiene una única distribución estacionaria a largo plazo, y el comportamiento conjunto converge a esa distribución conforme avanza el tiempo. Este resultado de ergodicidad justifica tratar trayectorias largas simuladas como si hubieran sido generadas por un sistema estable y bien mezclado cuando se usan como datos para algoritmos de aprendizaje.
Enseñar a las máquinas a leer los regímenes ocultos
Sobre esta columna vertebral probabilística, los autores tratan al caminante simulado como fuente de datos para aprendizaje supervisado. Dividen la secuencia de incrementos del caminante (la sucesión de pequeños movimientos) en ventanas solapadas y convierten cada ventana en características resumen sencillas: medias y variabilidad de los pasos, frecuencia de pasos positivos o nulos, dependencia a corto plazo y descriptores básicos de los últimos movimientos. Cada ventana recibe dos etiquetas: el estado del entorno al final de la ventana y el signo del paso siguiente. Usando solo estas características de bajo nivel, clasificadores estándar como máquinas de vectores de soporte, bosques aleatorios y máquinas de gradiente potenciadas pueden recuperar el entorno oculto sorprendentemente bien en un escenario de dos regímenes, con precisión y F1 balanceado cercanos a 0,9. Un modelo oculto de Markov basado en verosimilitud, autorizado a usar los parámetros verdaderos del simulador pero solo la misma ventana local, sirve como referencia útil y ofrece un rendimiento comparable en detección de regímenes.
Predecir el siguiente paso y reconstruir el entorno
Los autores preguntan entonces si conocer, o estimar, el régimen actual ayuda a predecir el siguiente movimiento del caminante. Comparan tres predictores: uno que ignora los regímenes, otro que añade características con probabilidades estimadas de régimen obtenidas en la primera tarea, y un “oráculo” idealizado que ve el régimen verdadero. En su configuración por defecto, introducir regímenes predichos conduce a mejoras solo modestas y no completamente estables respecto a la línea base. Por el contrario, el predictor oráculo rinde claramente mejor, especialmente en puntuación probabilística, revelando que el conocimiento perfecto del régimen ofrecería ganancias predictivas sustanciales que los clasificadores actuales solo alcanzan de manera parcial. Finalmente, los autores usan la secuencia de entornos decodificada para estimar con qué frecuencia el sistema permanece en el mismo régimen o cambia, y para calcular las frecuencias de régimen a largo plazo y las velocidades de mezcla implícitas. Pese a clasificaciones erróneas individuales, la matriz de transición reconstruida, la distribución estacionaria y la brecha espectral se aproximan a las derivadas del entorno verdadero, aunque hay una ligera subestimación sistemática de la persistencia de los regímenes.
Qué implica esto para encontrar estructura oculta en sistemas ruidosos
En conjunto, el estudio muestra que un paseo aleatorio aparentemente simple, cuando es impulsado por un pequeño entorno oculto de Markov, ofrece un banco de pruebas limpio para conectar probabilidad rigurosa con aprendizaje automático práctico. Bajo condiciones leves, el sistema conjunto se establece en un comportamiento estable a largo plazo, y los regímenes ocultos dejan una huella detectable en ventanas cortas del movimiento del caminante. Clasificadores estándar que usan características básicas pueden descubrir estos regímenes de forma fiable e incluso recuperar propiedades gruesas de la dinámica del entorno no observado a partir de una sola trayectoria larga. Al mismo tiempo, las ganancias modestas en la predicción a corto plazo al usar estimaciones imperfectas de régimen subrayan la brecha entre el valor “en principio” y lo que los métodos actuales extraen de datos finitos. Esa brecha, y el vínculo claro entre estructura probabilística y capacidad de aprendizaje, señalan el camino hacia modelos más ricos y herramientas de inferencia para descubrir impulsores ocultos en series temporales ruidosas.
Cita: Pambukyan, A., Saudagar, A.K.J. & Kumar, S. Ergodicity and regime recoverability in finite Markov-modulated random walks. Sci Rep 16, 12376 (2026). https://doi.org/10.1038/s41598-026-45019-w
Palabras clave: Paseo aleatorio modulado por Markov, regímenes ocultos, cadenas de Markov ergódicas, clasificación de series temporales, modelos ocultos de Markov