Clear Sky Science · it
Ergodicità e recuperabilità dei regimi nelle passeggiate casuali modulate da Markov in spazio finito
Perché i modelli nascosti nel moto casuale sono importanti
Molti sistemi intorno a noi sembrano puro rumore: i prezzi delle azioni che oscillano, particelle che urtano in un fluido, o pacchetti di dati che saltellano in una rete. Tuttavia questi moti rumorosi sono spesso guidati da forze lente e invisibili o «regimi» che cambiano silenziosamente il modo in cui si manifesta il movimento. Questo articolo studia una versione semplice ma potente di quell’idea: un camminatore casuale che si muove avanti e indietro su una linea corta, mentre un ambiente nascosto passa tra pochi stati che modificano il comportamento del camminatore. Gli autori mostrano, prima, come descrivere chiaramente questo sistema con la teoria delle probabilità, e poi fino a che punto gli strumenti standard di machine learning possono risalire ai regimi nascosti osservando solo il percorso del camminatore.
Come il camminatore percepisce un ambiente invisibile
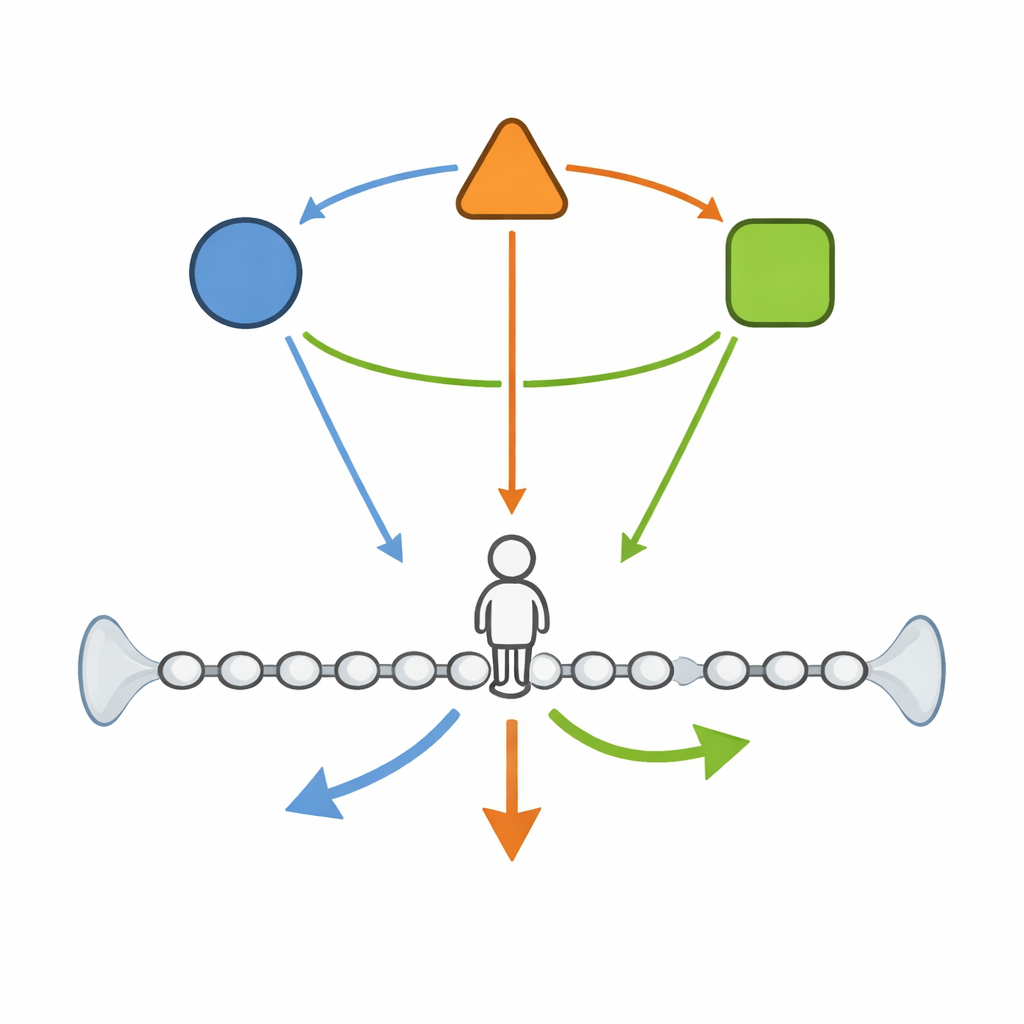
Il punto di partenza è un camminatore che vive su un reticolo unidimensionale finito, una fila di siti da un estremo all’altro con pareti riflettenti che gli impediscono di scappare. A ogni passo temporale il camminatore può muoversi a sinistra, a destra o restare fermo. Fondamentale è che le probabilità di andare a sinistra o a destra non sono fisse: dipendono da un «ambiente» invisibile che a sua volta salta tra pochi stati secondo regole markoviane. Quando l’ambiente è in uno stato, il camminatore può avere una tendenza a spostarsi a destra; in un altro, può preferire andare a sinistra o fermarsi più spesso. Matematicamente, il sistema combinato di posizione e ambiente forma una catena di Markov congiunta su uno spazio di stati finito, e gli autori scrivono le sue regole di transizione complete e un’equazione maestra a tempo discreto che descrive come le probabilità evolvono nel tempo.
Garantire stabilità e miscelamento a lungo termine
Poiché camminatore e ambiente interagiscono, si potrebbe temere che il sistema si blocchi o si comporti in modo irregolare. Gli autori identificano semplici condizioni strutturali che escludono questa possibilità. Richiedono che l’ambiente possa raggiungere eventualmente ciascuno dei suoi stati partendo da qualsiasi altro e abbia una certa probabilità di rimanere nello stesso stato, e che in ciascun regime il camminatore possa muoversi sia a sinistra sia a destra lungo la linea, con almeno una vera mossa di «restare dove si è» disponibile nel sistema congiunto. Sotto queste ipotesi naturali, entra in gioco la teoria standard delle catene di Markov finite: il processo combinato è irriducibile e aperiodico, possiede una distribuzione stazionaria unica a lungo termine, e il comportamento congiunto converge a questa distribuzione col passare del tempo. Questo risultato di ergodicità giustifica il trattamento di lunghe traiettorie simulate come se fossero generate da un sistema stabile e ben mescolato quando vengono usate in algoritmi di apprendimento.
Insegnare alle macchine a leggere i regimi nascosti
Sul piano di questa struttura probabilistica, gli autori trattano il camminatore simulato come una sorgente di dati per l’apprendimento supervisionato. Suddividono la sequenza degli incrementi del camminatore (la successione di piccoli spostamenti) in finestre sovrapposte e convertono ciascuna finestra in semplici caratteristiche riassuntive: medie e variabilità dei passi, frequenza dei passi positivi o nulli, dipendenze a breve termine e descrittori di base degli ultimi movimenti. Ogni finestra riceve due etichette: lo stato dell’ambiente alla fine della finestra e il segno del passo successivo. Usando solo queste caratteristiche di basso livello, classificatori pronti all’uso come support vector machine, foreste casuali e macchine di gradient boosting riescono a recuperare sorprendentemente bene l’ambiente nascosto in un’impostazione a due regimi, con accuratezza e punteggi F1 bilanciati vicini a 0,9. Un modello nascosto di Markov basato sulla verosimiglianza che può usare i veri parametri del simulatore ma solo la stessa finestra locale fornisce un punto di riferimento utile e ottiene prestazioni di rilevamento dei regimi comparabili.
Predire il passo successivo e ricostruire l’ambiente
Gli autori si chiedono quindi se conoscere, o indovinare, il regime corrente aiuti a prevedere la mossa successiva del camminatore. Confrontano tre predittori: uno che ignora i regimi, uno che arricchisce le caratteristiche con probabilità stimate dei regimi ottenute dal primo compito, e un «oracolo» idealizzato che vede il vero regime. Nella configurazione di default, l’inserimento dei regimi predetti porta solo a miglioramenti modesti e non del tutto stabili rispetto alla baseline. Per contro, il predittore oracolare performa chiaramente meglio, specialmente nelle valutazioni probabilistiche, rivelando che la conoscenza perfetta del regime offrirebbe guadagni predittivi sostanziali che gli attuali classificatori realizzano solo in parte. Infine, gli autori usano la sequenza di ambienti decodificata per stimare quanto spesso il sistema rimane nello stesso regime o cambia, e per calcolare le frequenze di regime a lungo termine e le velocità di miscelamento implicite. Nonostante errori di classificazione individuali, la matrice di transizione ricostruita, la distribuzione stazionaria e il gap spettrale sono vicini a quelli derivati dall’ambiente vero, sebbene vi sia una lieve sotto‑stimazione sistematica della persistenza dei regimi.
Cosa significa questo per trovare strutture nascoste in sistemi rumorosi
Nel complesso, lo studio mostra che una passeggiata casuale apparentemente semplice, quando è guidata da un piccolo ambiente di Markov nascosto, offre un banco di prova pulito per collegare probabilità rigorosa e machine learning pratico. Sotto condizioni miti, il sistema congiunto si assesta su un comportamento stabile a lungo termine, e i regimi nascosti lasciano un’impronta rilevabile in brevi finestre del moto del camminatore. I classificatori standard che usano caratteristiche di base possono svelare in modo affidabile questi regimi e persino recuperare proprietà grossolane della dinamica dell’ambiente invisibile da una singola lunga traiettoria. Allo stesso tempo, i miglioramenti modesti nella previsione a breve termine quando si usano stime imperfette dei regimi evidenziano il divario tra il valore «in principio» e ciò che i metodi attuali estraggono da dati finiti. Questo divario, e il chiaro legame tra struttura probabilistica e apprendibilità, indica la strada verso modelli più ricchi e strumenti di inferenza per scoprire i motori nascosti nelle serie temporali rumorose.
Citazione: Pambukyan, A., Saudagar, A.K.J. & Kumar, S. Ergodicity and regime recoverability in finite Markov-modulated random walks. Sci Rep 16, 12376 (2026). https://doi.org/10.1038/s41598-026-45019-w
Parole chiave: Passeggiata casuale modulata da Markov, regimi nascosti, catene di Markov ergodiche, classificazione di serie temporali, modelli di Markov nascosti