Clear Sky Science · sv
Ergodicitet och återfinnbarhet av regimer i ändliga Markov-modulerade slumpvandringar
Varför dolda mönster i slumpmässig rörelse spelar roll
Många system omkring oss ser ut som ren brusighet: aktiekurser som vobblar upp och ner, partiklar som stöter ihop i en vätska eller datapaket som hoppar genom ett nätverk. Dessa brusiga rörelser styrs ofta av långsamma, osynliga krafter eller "regimer" som tyst ändrar hur rörelsen utvecklas. Denna artikel studerar en enkel men kraftfull variant av den idén: en slumpvandrare som rör sig fram och tillbaka på en kort linje, medan en osynlig omgivning växlar mellan ett fåtal lägen som förändrar hur vandraren beter sig. Författarna visar först hur man rent probabilistiskt kan beskriva detta system och sedan hur långt standardverktyg inom maskininlärning kan nå i att avslöja de dolda regimerna enbart genom att observera vandrarens bana.
Hur en vandrare märker en osynlig omgivning
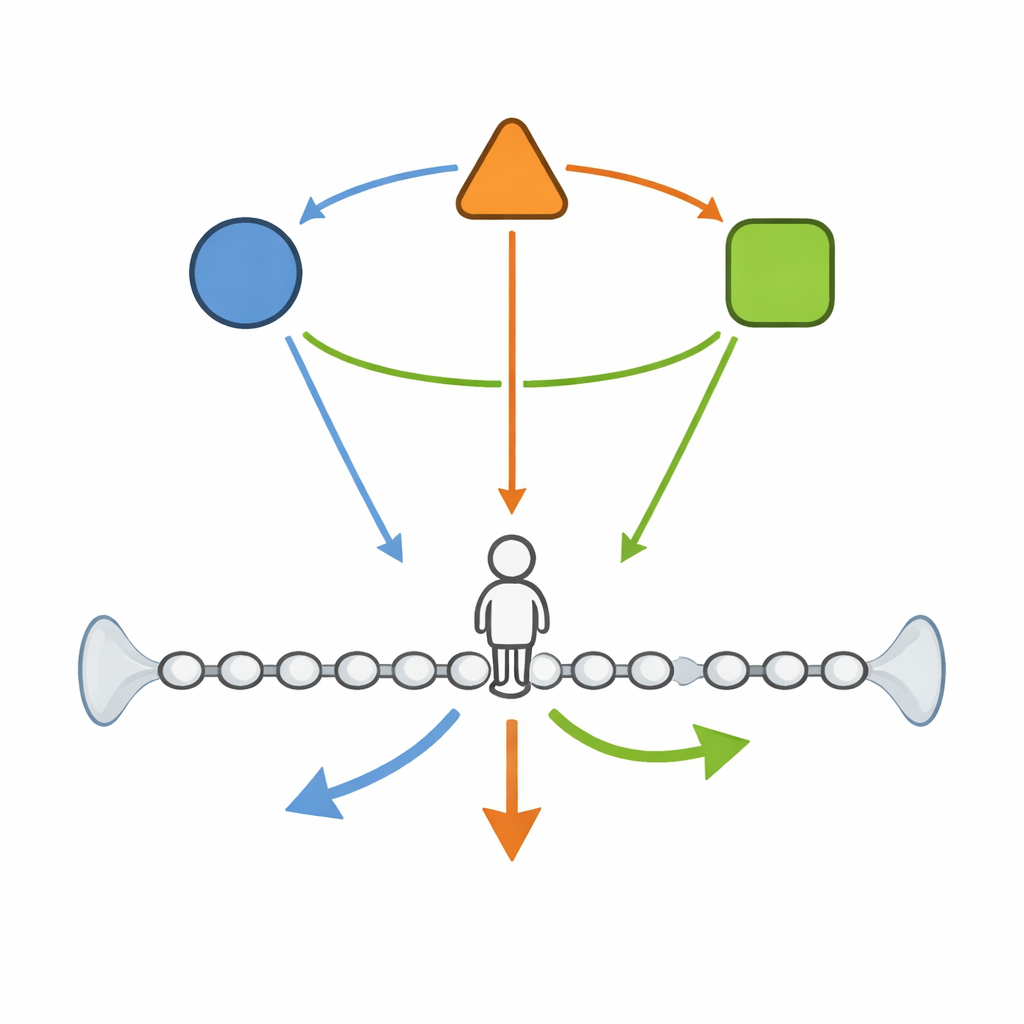
Utgångspunkten är en vandrare som lever på ett ändligt en-dimensionellt gitter, en rad av platser från ena änden till den andra med reflekterande väggar så att den inte kan ta sig ut. Vid varje tidsteg kan vandraren röra sig åt vänster, åt höger eller stå kvar. Avgörande är att sannolikheterna för att gå åt vänster eller höger inte är fasta: de beror på en osynlig "omgivning" som själv hoppar mellan några tillstånd enligt sina egna Markov-regler. När omgivningen är i ett läge kan vandraren till exempel ha en bias åt höger; i ett annat läge kan den föredra att ta steg åt vänster eller avvakta oftare. Matematiskt utgör det sammanlagda systemet av position och omgivning en gemensam Markov-kedja på ett ändligt tillståndsrum, och författarna skriver ned dess fullständiga övergångsregler och en diskret tids masterekvation som beskriver hur sannolikheterna utvecklas över tid.
Att garantera långsiktig stabilitet och blandning
Eftersom vandraren och omgivningen interagerar kan man oroa sig för att systemet skulle kunna fastna eller bete sig oregelbundet. Författarna identifierar enkla strukturella villkor som utesluter detta. De kräver att omgivningen så småningom kan nå vilket av sina tillstånd som helst från något annat och har någon chans att stanna kvar där den är, samt att vandraren i varje regim kan röra sig både åt vänster och höger längs linjen, med åtminstone ett verkligt "stanna kvar"-steg tillgängligt i det gemensamma systemet. Under dessa naturliga antaganden slår standardteori för ändliga Markov-kedjor till: den kombinerade processen är irreducibel och aperodisk, har en unik långsiktig stationär fördelning, och det gemensamma beteendet konvergerar mot denna fördelning med tiden. Detta ergodicitetsresultat rättfärdigar att betrakta långa simulerade banor som om de genererats från ett stabilt, välblandat system när man matar in dem i inlärningsalgoritmer.
Att lära maskiner läsa de dolda regimerna
Ovanpå denna probabilistiska ryggrad behandlar författarna den simulerade vandraren som en datakälla för övervakad inlärning. De skär vandrarens inkrementsekvens (följden av små rörelser) i överlappande fönster och omvandlar varje fönster till enkla summerande drag: medelvärden och variabilitet i stegen, hur ofta de är positiva eller noll, korttidsberoende och grundläggande beskrivare av de sista rörelserna. Varje fönster får två etiketter: omgivningens tillstånd i slutet av fönstret och tecknet på nästa steg. Med enbart dessa lågnivådrag kan vanliga klassificerare som support vector machines, random forests och gradient boosting-maskiner återfinna den dolda omgivningen förvånansvärt väl i ett tvåregimsscenario, med noggrannhet och balanserade F1-värden nära 0,9. En sannolikhetsbaserad dold Markov-modell som får använda de sanna simulatorparametrarna men endast samma lokala fönster utgör en nyttig referenspunkt och ger jämförbar regimdetektionsprestanda.
Att förutsäga nästa steg och rekonstruera omgivningen
Författarna ställer sedan frågan om kunskap eller uppskattning av den aktuella regimens tillstånd hjälper till att förutsäga vandrarens nästa rörelse. De jämför tre prediktorer: en som ignorerar regimer, en som utökar dragen med skattade regimsannolikheter från den första uppgiften, och en idealiserad "orakel" som ser den sanna regimens tillstånd. I deras standardkonfiguration leder inmatning av predicerade regimer till endast måttliga och inte helt stabila förbättringar jämfört med baslinjen. Däremot presterar orakelprediktorn tydligt bättre, särskilt i probabilistisk poängsättning, vilket visar att perfekt regimkunskap skulle erbjuda betydande prediktiva vinster som nuvarande klassificerare bara delvis uppnår. Slutligen använder författarna den avkodade omgivningssekvensen för att skatta hur ofta systemet stannar i samma regim eller byter, och för att beräkna de implicita långsiktiga regimfrekvenserna och blandningshastigheterna. Trots enskilda feltolkningar ligger den rekonstruerade övergångsmatrisen, den stationära fördelningen och spektralgapet nära de som härleds från den sanna omgivningen, om än med en systematisk liten underskattning av regimpersistenten.
Vad detta innebär för att hitta dold struktur i brusiga system
Sammantaget visar studien att en till synes enkel slumpvandring, när den drivs av en liten dold Markov-omgivning, erbjuder en ren testbädd för att knyta rigorös sannolikhetsteori till praktisk maskininlärning. Under milda villkor sätter sig det gemensamma systemet i ett stabilt långsiktigt beteende, och de dolda regimerna lämnar ett detekterbart fingeravtryck i korta fönster av vandrarens rörelse. Standardklassificerare som använder grundläggande drag kan pålitligt avslöja dessa regimer och till och med återvinna grova egenskaper hos den osedda omgivningens dynamik från en enda lång bana. Samtidigt belyser de måttliga vinsterna i närtidsprediktion med ofullständiga regimskattningar skillnaden mellan det som är "i princip" möjligt och vad nuvarande metoder kan utvinna ur ändlig data. Denna klyfta, och den tydliga länken mellan probabilistisk struktur och lärbarhet, pekar mot rikare modeller och inferensverktyg för att avslöja dolda drivkrafter i brusiga tidsserier.
Citering: Pambukyan, A., Saudagar, A.K.J. & Kumar, S. Ergodicity and regime recoverability in finite Markov-modulated random walks. Sci Rep 16, 12376 (2026). https://doi.org/10.1038/s41598-026-45019-w
Nyckelord: Markov-modulerad slumpvandring, dolda regimer, ergodiska Markov-kedjor, tidsserieklassificering, dolda Markov-modeller