Clear Sky Science · pt
Ergodicidade e recuperabilidade de regimes em caminhadas aleatórias moduladas por Markov finitas
Por que padrões ocultos em movimento aleatório importam
Muitos sistemas ao nosso redor parecem puro ruído: preços de ações oscilando para cima e para baixo, partículas se chocando em um fluido ou pacotes de dados pulando por uma rede. Ainda assim, esses movimentos barulhentos frequentemente são conduzidos por forças lentas e invisíveis — ou “regimes” — que mudam discretamente como o movimento se manifesta. Este artigo estuda uma versão simples, porém poderosa, dessa ideia: um caminhante aleatório que se desloca para frente e para trás em uma linha curta, enquanto um ambiente não observado alterna entre alguns modos que alteram o comportamento do caminhante. Os autores mostram, primeiro, como descrever esse sistema de forma limpa com teoria da probabilidade e, em seguida, quão longe as ferramentas padrão de aprendizado de máquina vão para descobrir os regimes ocultos apenas observando a trajetória do caminhante.
Como um caminhante sente um ambiente invisível
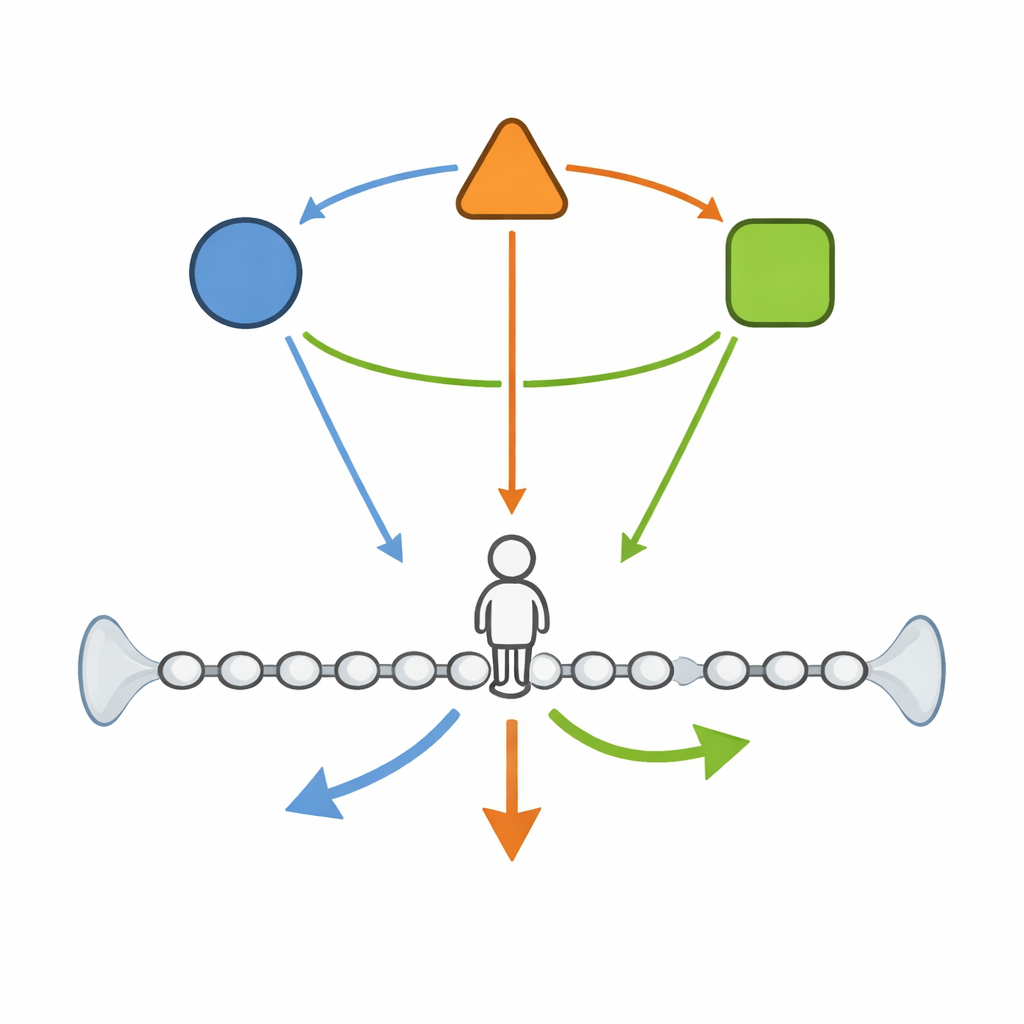
O ponto de partida é um caminhante que vive em uma grade unidimensional finita, uma sequência de sítios de uma extremidade à outra com paredes refletoras para que não possa escapar. A cada passo de tempo o caminhante pode mover-se para a esquerda, para a direita ou permanecer no lugar. Crucialmente, as probabilidades de ir para a esquerda ou para a direita não são fixas: dependem de um “ambiente” invisível que por sua vez salta entre alguns estados segundo suas próprias regras markovianas. Quando o ambiente está em um estado, o caminhante pode ter tendência a derivar para a direita; em outro, pode preferir passos à esquerda ou pausar com mais frequência. Matematicamente, o sistema combinado de posição e ambiente forma uma cadeia de Markov conjunta em um espaço de estados finito, e os autores escrevem suas regras completas de transição e uma equação mestra em tempo discreto descrevendo como as probabilidades evoluem ao longo do tempo.
Garantindo estabilidade de longo prazo e mistura
Como o caminhante e o ambiente interagem, pode-se temer que o sistema emperre ou se comporte de forma irregular. Os autores identificam condições estruturais simples que descartam essa possibilidade. Exigem que o ambiente possa eventualmente atingir qualquer um de seus estados a partir de qualquer outro e tenha alguma chance de permanecer onde está, e que em cada regime o caminhante possa mover-se para a esquerda e para a direita ao longo da linha, com pelo menos uma verdadeira transição de “ficar no lugar” disponível no sistema conjunto. Sob essas suposições naturais, entra em cena a teoria padrão de cadeias de Markov finitas: o processo combinado é irredutível e aperiódico, possui uma distribuição estacionária única de longo prazo, e o comportamento conjunto converge para essa distribuição conforme o tempo avança. Esse resultado de ergodicidade justifica tratar trajetórias longas simuladas como se tivessem sido geradas por um sistema estável e bem misturado ao alimentá-las em algoritmos de aprendizado.
Ensinando máquinas a ler os regimes ocultos
Sobre essa espinha dorsal probabilística, os autores tratam o caminhante simulado como uma fonte de dados para aprendizado supervisionado. Eles fatiam a sequência de incrementos do caminhante (a sucessão de pequenos movimentos) em janelas sobrepostas e convertem cada janela em características-resumo simples: médias e variabilidade dos passos, com que frequência são positivos ou zero, dependência de curto prazo e descritores básicos dos últimos movimentos. Cada janela recebe dois rótulos: o estado do ambiente no final da janela e o sinal do próximo passo. Usando apenas essas características de baixo nível, classificadores prontos, como máquinas de vetor de suporte, florestas aleatórias e métodos de gradient boosting conseguem recuperar o ambiente oculto surpreendentemente bem em um cenário de dois regimes, com acurácia e F1 balanceado próximos de 0,9. Um modelo oculto de Markov baseado em verossimilhança, ao qual se permite usar os verdadeiros parâmetros do simulador mas somente a mesma janela local, fornece um ponto de referência útil e produz desempenho comparável na detecção de regimes.
Prevendo o próximo passo e reconstruindo o ambiente
Os autores então perguntam se conhecer, ou estimar, o regime atual ajuda a prever o próximo movimento do caminhante. Eles comparam três preditores: um que ignora regimes, outro que amplia as características com probabilidades de regime estimadas na primeira tarefa, e um “oráculo” idealizado que vê o regime verdadeiro. Na configuração padrão, alimentar o modelo com regimes preditos leva a melhorias modestas e não totalmente estáveis sobre a linha de base. Em contraste, o preditor oráculo se sai claramente melhor, especialmente em pontuação probabilística, revelando que o conhecimento perfeito do regime ofereceria ganhos preditivos substanciais que os classificadores atuais apenas parcialmente realizam. Por fim, os autores usam a sequência de ambientes decodificada para estimar com que frequência o sistema permanece no mesmo regime ou alterna, e para calcular as frequências de regime de longo prazo e as velocidades de mistura implícitas. Apesar de classificações individuais equivocadas, a matriz de transição reconstruída, a distribuição estacionária e a folga espectral ficam próximas daquelas derivadas do ambiente verdadeiro, embora haja uma pequena subestimação sistemática da persistência dos regimes.
O que isso significa para encontrar estrutura oculta em sistemas ruidosos
No geral, o estudo mostra que uma caminhada aleatória aparentemente simples, quando conduzida por um pequeno ambiente markoviano oculto, oferece um campo de testes limpo para conectar probabilidade rigorosa com aprendizado de máquina prático. Sob condições moderadas, o sistema conjunto se acomoda em um comportamento estável de longo prazo, e os regimes ocultos deixam uma impressão detectável em janelas curtas do movimento do caminhante. Classificadores padrão usando características básicas podem descobrir esses regimes de forma confiável e até recuperar propriedades grosseiras da dinâmica do ambiente oculto a partir de uma única trajetória longa. Ao mesmo tempo, os ganhos modestos na previsão de curto prazo ao usar estimativas de regime imperfeitas realçam a lacuna entre o valor “em princípio” e o que métodos atuais extraem de dados finitos. Essa lacuna, e o vínculo claro entre estrutura probabilística e aprendibilidade, aponta o caminho para modelos e ferramentas de inferência mais ricos para descobrir motores ocultos em séries temporais ruidosas.
Citação: Pambukyan, A., Saudagar, A.K.J. & Kumar, S. Ergodicity and regime recoverability in finite Markov-modulated random walks. Sci Rep 16, 12376 (2026). https://doi.org/10.1038/s41598-026-45019-w
Palavras-chave: Caminhada aleatória modulada por Markov, regimes ocultos, cadeias de Markov ergódicas, classificação de séries temporais, modelos ocultos de Markov