Clear Sky Science · de
Ergodizität und Wiederherstellbarkeit von Regimes in endlichen Markov-modulierten Random Walks
Warum versteckte Muster in zufälliger Bewegung wichtig sind
Viele Systeme um uns herum sehen wie reines Rauschen aus: Aktienkurse, die auf und ab zucken, Teilchen, die in einer Flüssigkeit stoßen, oder Datenpakete, die über ein Netzwerk hüpfen. Doch solche verrauschten Bewegungen werden oft von langsamen, unsichtbaren Kräften oder „Regimes“ gesteuert, die stillschweigend verändern, wie sich Bewegung entfaltet. Diese Arbeit untersucht eine einfache, aber aussagekräftige Variante dieser Idee: einen Zufallswanderer, der auf einer kurzen Linie hin und her läuft, während eine unsichtbare Umgebung zwischen wenigen Modi wechselt, die das Verhalten des Wanderers verändern. Die Autorinnen und Autoren zeigen zunächst, wie sich dieses System sauber mit Wahrscheinlichkeitsrechnung beschreiben lässt, und dann, wie weit Standardwerkzeuge des maschinellen Lernens kommen, wenn sie allein aus dem Beobachten der Wandererbahn versuchen, die versteckten Regimes aufzudecken.
Wie ein Wanderer eine unsichtbare Umgebung spürt
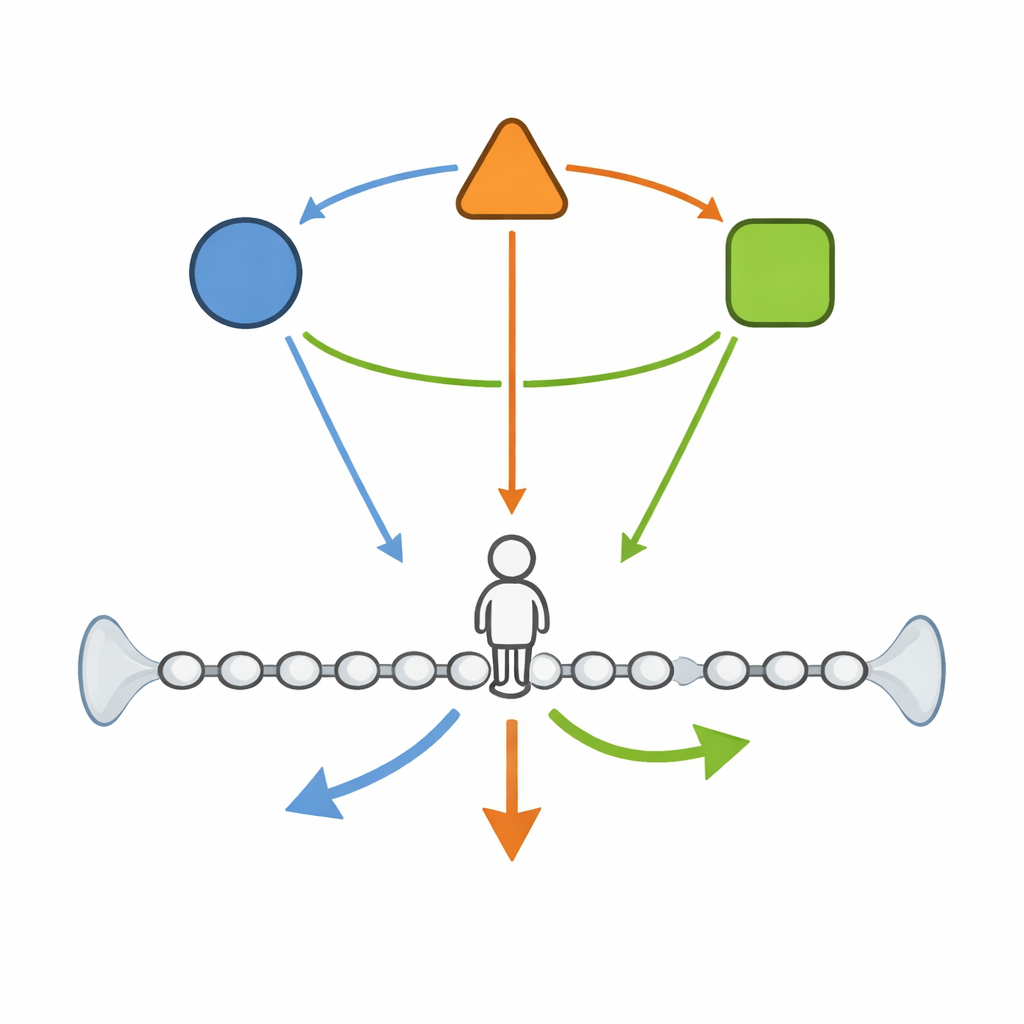
Ausgangspunkt ist ein Wanderer, der auf einem endlichen eindimensionalen Gitter lebt, einer Reihe von Stellungen von einem Ende zum anderen mit reflektierenden Wänden, sodass er nicht entweichen kann. In jedem Zeitschritt kann der Wanderer nach links, nach rechts oder stehen bleiben. Entscheidenderweise sind die Wahrscheinlichkeiten für Links- oder Rechtsbewegungen nicht fest: Sie hängen von einer unsichtbaren „Umgebung“ ab, die selbst gemäß ihren eigenen Markov-Regeln zwischen einigen Zuständen springt. Befindet sich die Umgebung in einem Zustand, kann der Wanderer beispielsweise eine Rechtsdrift aufweisen; in einem anderen Zustand zieht er möglicherweise nach links oder bleibt häufiger stehen. Mathematisch bildet das kombinierte System aus Position und Umgebung eine gemeinsame Markov-Kette auf einem endlichen Zustandsraum, und die Autorinnen und Autoren formulieren dessen vollständige Übergangsregeln sowie eine zeitdiskrete Mastergleichung, die beschreibt, wie sich die Wahrscheinlichkeiten über die Zeit entwickeln.
Gewährleistung von Stabilität und Mischung auf lange Sicht
Da Wanderer und Umgebung interagieren, könnte man befürchten, dass das System stecken bleibt oder sich unregelmäßig verhält. Die Autorinnen und Autoren identifizieren einfache strukturelle Bedingungen, die dies ausschließen. Sie verlangen, dass die Umgebung schließlich von jedem Zustand aus jeden anderen erreichen kann und eine gewisse Wahrscheinlichkeit hat, im selben Zustand zu verbleiben, und dass sich in jedem Regime der Wanderer nach links und rechts entlang der Linie bewegen kann, wobei im gemeinsamen System mindestens eine echte „Bleiben“-Bewegung verfügbar ist. Unter diesen natürlichen Annahmen greift die klassische Theorie endlicher Markov-Ketten: Der kombinierte Prozess ist irreduzibel und aperiodisch, besitzt eine eindeutige langfristige stationäre Verteilung, und das gemeinsame Verhalten konvergiert im Zeitverlauf gegen diese Verteilung. Dieses Ergodizitätsergebnis rechtfertigt es, lange simulierte Bahnen so zu behandeln, als seien sie aus einem stabilen, gut durchmischten System erzeugt worden, wenn man sie in Lernalgorithmen einspeist.
Maschinen das Lesen der versteckten Regimes beibringen
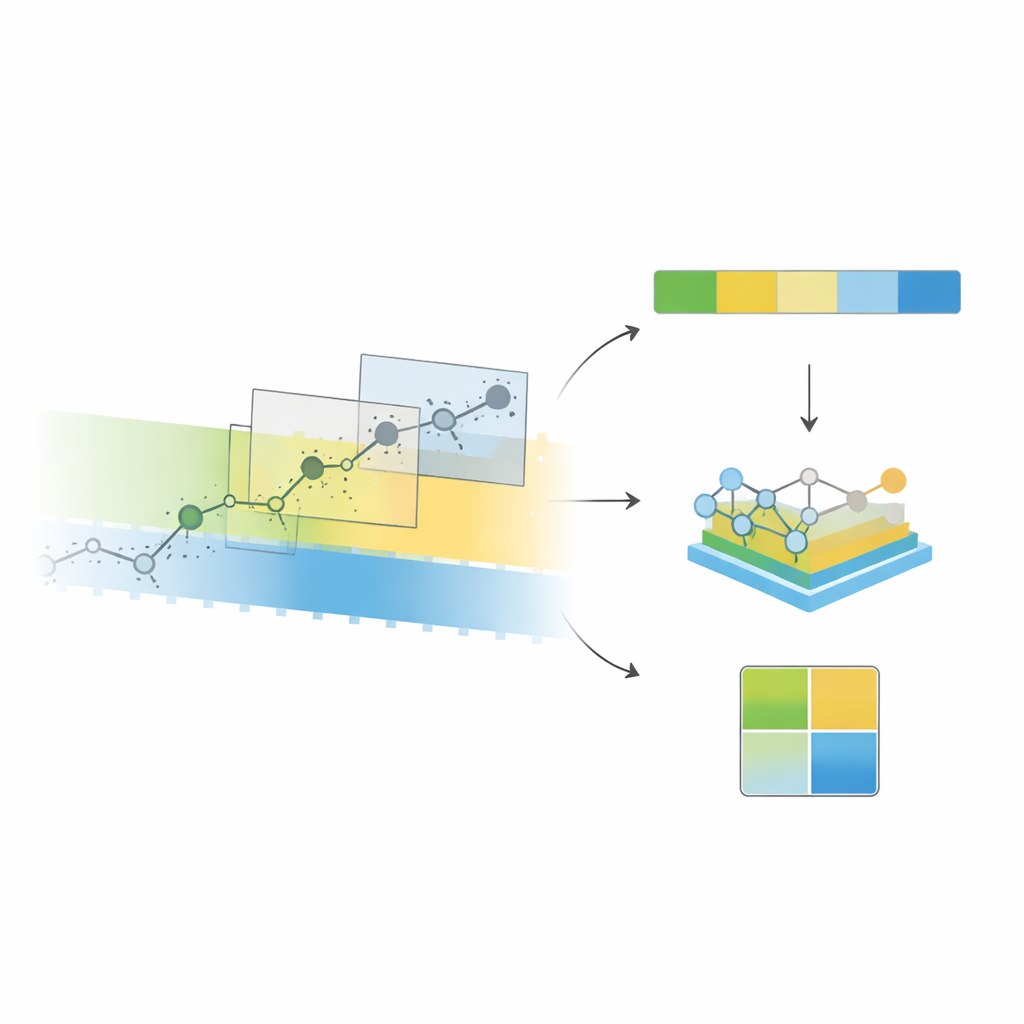
Auf dieser probabilistischen Basis behandeln die Autorinnen und Autoren den simulierten Wanderer als Datenquelle für überwachtes Lernen. Sie schneiden die Folge von Schritten des Wanderers (die Abfolge kleiner Bewegungen) in überlappende Fenster und wandeln jedes Fenster in einfache Zusammenfassungsmerkmale um: Mittelwerte und Variabilität der Schritte, wie oft sie positiv oder null sind, kurzfristige Abhängigkeiten und grundlegende Beschreibungen der letzten wenigen Bewegungen. Jedes Fenster erhält zwei Labels: den Umgebungszustand am Ende des Fensters und das Vorzeichen des nächsten Schritts. Mit nur diesen niedrigstufigen Merkmalen können Standard-Klassifikatoren wie Support Vector Machines, Random Forests und Gradient Boosting Machines in einer Zwei-Regime-Situation die versteckte Umgebung überraschend gut rekonstruieren, mit Genauigkeiten und ausgewogenen F1-Werten nahe 0,9. Ein likelihood-basiertes verstecktes Markov-Modell, dem erlaubt wird, die wahren Simulator-Parameter zu nutzen, aber ebenfalls nur das gleiche lokale Fenster zu verwenden, dient als nützlicher Referenzpunkt und erzielt vergleichbare Leistung bei der Regimerkennung.
Den nächsten Schritt vorhersagen und die Umgebung rekonstruieren
Die Autorinnen und Autoren fragen dann, ob das Kennen oder Schätzen des aktuellen Regimes dabei hilft, den nächsten Schritt des Wanderers vorherzusagen. Sie vergleichen drei Prädiktoren: einen, der Regimes ignoriert, einen, der die Merkmale mit geschätzten Regime-Wahrscheinlichkeiten aus der ersten Aufgabe ergänzt, und einen idealisierten „Orakel“-Prädiktor, der das wahre Regime sieht. In ihrer Standardkonfiguration führen eingespeiste vorhergesagte Regimes nur zu moderaten und nicht völlig stabilen Verbesserungen gegenüber der Basislinie. Dagegen schneidet der Orakel-Prädiktor deutlich besser ab, insbesondere bei probabilistischen Bewertungen, was zeigt, dass perfekte Regimekenntnis erhebliche Vorhersagegewinne bringen würde, die aktuelle Klassifikatoren nur teilweise realisieren. Schließlich nutzen die Autorinnen und Autoren die decodierte Umgebungssequenz, um zu schätzen, wie häufig das System im selben Regime verbleibt oder wechselt, und um die impliziten langfristigen Regimehäufigkeiten und Mischgeschwindigkeiten zu berechnen. Trotz einzelner Fehlklassifikationen liegen die rekonstruierte Übergangsmatrix, die stationäre Verteilung und die spektrale Lücke nahe denen, die sich aus der wahren Umgebung ergeben, obwohl eine systematische leichte Unterschätzung der Regimepersistenz besteht.
Was das Auffinden versteckter Struktur in verrauschten Systemen bedeutet
Insgesamt zeigt die Studie, dass ein scheinbar einfacher Random Walk, gesteuert von einer kleinen versteckten Markov-Umgebung, ein klares Testbett darstellt, um rigorose Wahrscheinlichkeitslehre mit praktischem maschinellen Lernen zu verbinden. Unter milden Bedingungen stabilisiert sich das gemeinsame System zu einem langfristigen Verhalten, und die versteckten Regimes hinterlassen in kurzen Fenstern der Wandererbewegung einen detektierbaren Fingerabdruck. Standardklassifikatoren mit einfachen Merkmalen können diese Regimes zuverlässig aufdecken und sogar grobe Eigenschaften der Dynamik der unsichtbaren Umgebung aus einer einzigen langen Trajektorie rekonstruieren. Gleichzeitig machen die geringen Verbesserungen bei kurzfristigen Vorhersagen durch unvollkommene Regimeschätzungen deutlich, wie groß die Lücke zwischen dem „prinzipiellen“ Wert und dem ist, was aktuelle Methoden aus endlichen Daten extrahieren. Diese Lücke und der klare Zusammenhang zwischen probabilistischer Struktur und Lernbarkeit weisen den Weg zu reichhaltigeren Modellen und Inferenzwerkzeugen, um versteckte Treiber in verrauschten Zeitreihen aufzudecken.
Zitation: Pambukyan, A., Saudagar, A.K.J. & Kumar, S. Ergodicity and regime recoverability in finite Markov-modulated random walks. Sci Rep 16, 12376 (2026). https://doi.org/10.1038/s41598-026-45019-w
Schlüsselwörter: Markov-modulierter Random Walk, versteckte Regimes, ergodische Markov-Ketten, Zeitreihenklassifikation, versteckte Markov-Modelle