Clear Sky Science · tr
Uzaktan algılamada zayıf ve küçük hedef tespiti için hafif özellik birleştirme ağı
Gökyüzünden küçük nesneleri bulmanın önemi
Trafik ve gemi izlemeden afet müdahalesini yönlendirmeye kadar, bugünün uyduları ve insansız hava araçları (İHA) yeryüzünü sürekli tarıyor. Ancak en çok önem verdiğimiz birçok öğe — küçük araçlar, tekneler veya altyapı parçaları — görüntülerde sadece birkaç piksel boyutunda görünür ve kalabalık şehir bloklarında, ormanlarda veya kıyılarda kolayca kaybolur. Bu makale, bulanık, loş veya dikkat dağıtan arka planlarla dolu olsa bile uzaktan algılama görüntülerinde bu zayıf, küçük hedefleri güvenilir şekilde tespit etmek üzere tasarlanmış yeni, hafif bir bilgisayarlı görü sistemi olan GSS‑YOLO’yu tanıtıyor.
Samanlıkta iğne arama zorluğu
Uçaklara ve uydulara monte edilen uzaktan algılama kameraları aynı anda çok geniş alanları yakalar. Bu geniş görüş işe yarasa da her nesneyi küçültür: küçük hedefler yalnızca 10×10 piksel veya daha az kaplayabilir. Aynı zamanda arka planlar karmaşıktır—bulutlar, çatı örtüleri, ağaçlar, nehirler, gölgeler ve mevsimsel ışık ya da hava değişimleri gürültü ekler. Geleneksel tespit sistemleri ya bu küçük nesneleri kaçırır ya da drone’lar veya uç uç (edge) cihazlarda gerçek zamanlı çalıştırılması zor, ağır ve yavaş modellere ihtiyaç duyar. Yazarlar, hem küçük nesneler için yüksek doğruluklu hem de sınırlı donanımda hızlı çalışabilecek kadar verimli bir model geliştirmeyi hedeflediler.
Küçük detaylara odaklı kompakt bir sistem
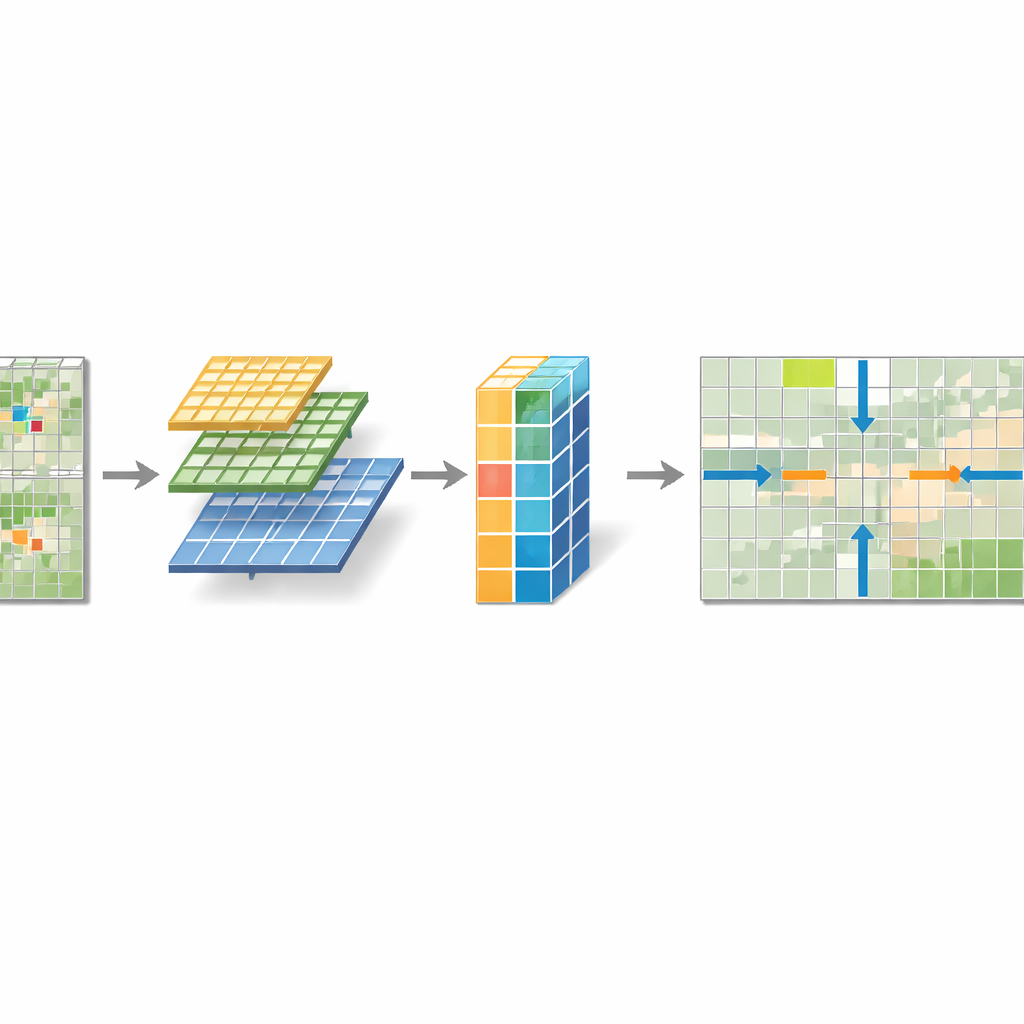
Araştırmacılar popüler gerçek zamanlı bir dedektör olan YOLOv5’i temel alıp GSS‑YOLO’yu oluşturmak için ana parçaları yeniden tasarlıyor. Birlikte çalışan üç ana yapı bloğu sunuyorlar. İlk olarak, Sığ‑Derin Bilgi Birleştirme (SIA) modülü, görüntüdeki küçük ve biraz daha büyük çevrelerden gelen bilgileri harmanlayarak ağın ince kenarları daha geniş bağlamla birleştirmesine yardımcı olur ve modeli büyütmeden çalışır. İkinci olarak, SPD‑Conv bloğu görüntü boyutunu küçültme şeklini değiştirir: örnekleme azaltılırken pikselleri doğrudan atmak yerine bunları yeniden düzenleyerek ince detayların ekstra kanallarda korunmasını sağlar ve ardından yumuşak sıkıştırma uygulanır. Üçüncü olarak, Küresel Bağlam Farkındalığı Modülü (GCAM) son detektörden hemen önce konumlanır ve tüm görüntüye bakarak küçük hedefler içerebilecek konumları öne çıkarırken arka plan karmaşasını baskılar.
Yeni modüller nasıl birlikte çalışıyor
SIA, birçok görsel ağın temel bir zayıflığını ele alır: sıradan konvolüsyonlar yalnızca yerel yamaları görür ve küresel bağlamla zorlanır. Birbirine paralel olarak biraz farklı ölçeklere bakan filtreleri çalıştırıp sonra hafif katmanlarla özellikleri karıştırıp düzenleyerek SIA, çok fazla parametre eklemeden küçük nesnelerin daha zengin betimlerini üretir. SPD‑Conv daha farklı bir sorunu çözer—agresif aşağı örneklemeden kaynaklanan bilgi kaybı. Özellik haritasını iç içe geçmiş alt‑ızgaralara böler ve derinlik doğrultusunda üst üste koyar, böylece hiçbir piksel atılmaz; ardından basit bir 1×1 filtre bu daha zengin temsili sıkıştırır. GCAM ise küresel bir “spot ışığı” etkisi katar. Küçük nesnelerin ortaya çıktığı satır ve sütunları izlemek için yatay ve dikey yönlerde ayrı ayrı havuzlama yapar ve bunu kanallar üzerinde sadeleştirilmiş bir dikkat mekanizmasıyla birleştirir. Sonuç, muhtemel hedef konumlarındaki sinyalleri güçlendiren ve diğer yerlerdeki yanıltıcı dokuları baskılayan çok boyutlu bir maskedir.
Modelin teste sokulması
Bu fikirlerin gerçek dünya kazanımlarına dönüşüp dönüşmediğini görmek için ekip GSS‑YOLO’yu üç zorlu veri setinde değerlendirdi. USOD, loş ışıklı sahnelerde ultra‑küçük, düşük kontrastlı gri tonlu hedefler içeriyor; VisDrone2019 drone’larla çekilmiş kalabalık kentsel sahneler sunuyor ve küçük yayalar ile araçlarla dolu; DIOR ise uçaklar, köprüler, gemiler, spor sahaları ve daha fazlasını içeren çeşitli bir uydu koleksiyonudur. Üç veri setinde de GSS‑YOLO, son YOLO sürümleri ve birkaç özel küçük nesne modelini içeren modern rakipler karşısında tutarlı biçimde daha yüksek hassasiyet, geri çağırma ve ortalama tespit kalitesi elde etti. Örneğin USOD veri setinde sadece en iyi doğruluğu vermekle kalmadı, aynı zamanda yaklaşık 5 milyon parametre ile en az parametreye ve yüzlerce kare/saniyeye ulaşan en yüksek işlem hızına da sahipti. Görsel örnekler, diğer sistemlerin zorlandığı kalabalık, karmaşık sahnelerde kaçırılan tespitlerden ve yanlış alarmlardan kaçındığını gösteriyor.
Günlük uygulamalar için anlamı
Uzman olmayanlar için ana mesaj şudur: GSS‑YOLO, büyük veri merkezlerine güvenmeden drone’lar, uydular veya diğer kompakt cihazlar üzerinde küçük, zor görünen hedefleri keskin gözle tespit etmeyi daha uygulanabilir kılıyor. İnce görüntü detaylarını daha iyi koruyup küresel bağlamı dikkati yönlendirmek için kullanarak model, zayıf lekeleri güvenle tanınan nesnelere dönüştürüyor. Hedefin çoğu gizlendiğinde veya hareket bulanıklığı çok şiddetli olduğunda hâlâ başarısız olabileceği durumlar olsa da bu çalışma, trafik yönetimi, çevresel gözlem, güvenlik ve acil müdahale gibi geniş alanlı gerçek zamanlı izleme için pratik bir adımı temsil ediyor; çünkü küçük detayları çabuk görebilmek büyük fark yaratabilir.
Atıf: Wu, Z., Li, N., Tian, Z. et al. A lightweight feature fusion network for weak and small target detection in remote sensing. Sci Rep 16, 13295 (2026). https://doi.org/10.1038/s41598-026-43560-2
Anahtar kelimeler: uzaktan algılama, küçük nesne algılama, hafif sinir ağı, drone görüntüleri, Dünya gözlemi