Clear Sky Science · ja
リモートセンシングにおける弱小・小型ターゲット検出のための軽量特徴融合ネットワーク
空から微小物体を見つけることがなぜ重要か
交通や船舶の監視から災害対応の誘導まで、今日の衛星やドローンは地表を常時スキャンしています。しかし、関心の高い対象—小型車両、ボート、あるいはインフラの一部など—は画像では数ピクセルしか占めず、混み合った市街地や森林、海岸線のなかで簡単に埋もれてしまいます。本稿は GSS‑YOLO と名付けた、新しい軽量コンピュータビジョンシステムを紹介します。ブレや暗さ、背景の雑音が多いリモートセンシング画像においても、こうした弱く小さいターゲットを確実に検出するよう設計されています。
干し草の山から針を探す難しさ
航空機や衛星搭載のリモートセンシングカメラは広い範囲を一度に撮影します。その広視野は有益ですが、各対象は縮小され、小さなターゲットは10×10ピクセル以下にしか見えないことがあります。同時に背景は複雑で、雲、屋根、樹木、河川、影、季節や天候による照明変化などがノイズを生みます。従来の検出システムはこれらの小さな物体を見逃すか、あるいはリアルタイムでドローンやエッジ機器上で実行するには重すぎる大規模モデルに頼りがちです。著者らは小物体に対して高精度でありながら、限定されたハードウェア上で高速に動作する効率的なモデルを構築することを目指しました。
小さなディテールに合わせたコンパクトなシステム
研究チームはリアルタイム検出で広く使われる YOLOv5 を出発点とし、主要部分を再設計して GSS‑YOLO を作成しました。相互に補完する三つの主要ブロックを導入しています。まず、浅層とやや広域の情報を統合する Shallow‑Deep Information Aggregation(SIA)モジュールは、モデルを肥大化させずに細かいエッジと広い文脈を結びつけます。次に、SPD‑Conv ブロックはダウンサンプリングの方法を変え、単にピクセルを捨てるのではなく、それらを再配置して細部情報を追加チャネルとして保持した上で穏やかに圧縮します。第三に、Global Context‑Aware Module(GCAM)は最終検出器の直前に配置され、画像全体を見渡して小さなターゲットがありそうな位置を強調し、背景の雑音を抑えます。
新しいモジュールの連携動作
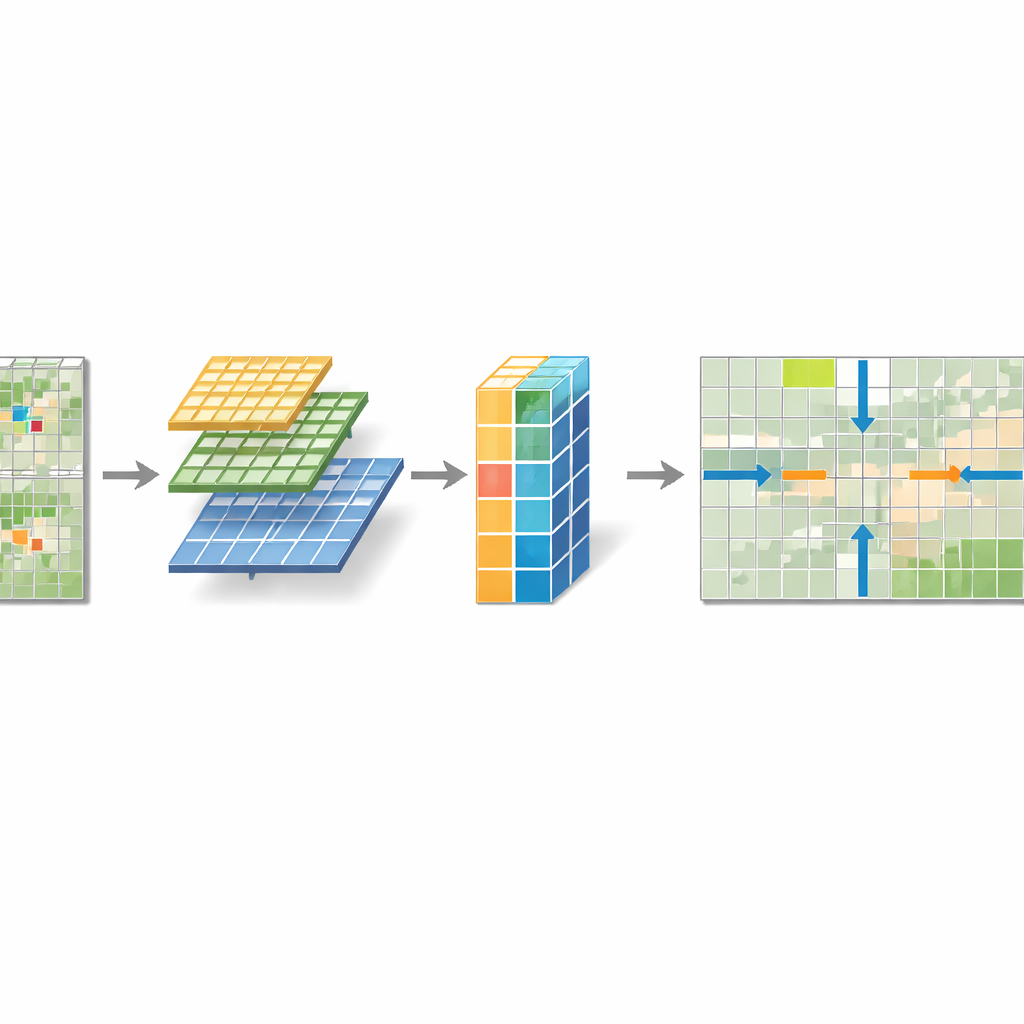
SIA は多くのビジョンネットワークが抱える根本的な弱点に取り組みます。通常の畳み込みは局所領域のみを見ており、グローバルな文脈の把握が難しいためです。SIA はわずかに異なるスケールを見る並列フィルタを実行し、それらを軽量な層で混合・正則化することで、パラメータをほとんど増やさずに小物体の記述子を豊かにします。SPD‑Conv は別の問題、すなわちダウンサンプリングによる情報損失に対処します。特徴マップを交互に区切ったサブグリッドに分割して深さ方向に積み重ねることで、ピクセルを捨てずに保持し、1×1 の単純なフィルタでこの豊かな表現を圧縮します。GCAM は全体にわたる“スポットライト”効果を与えます。水平・垂直方向に別々にプーリングして行列のどの行・列に小さな物体が現れるかを追跡し、チャネル上の簡潔なアテンション機構と組み合わせます。その結果、ターゲット位置で信号を強化し、誤解を招くテクスチャを抑制する多次元マスクが得られます。
モデルの実地検証
これらのアイデアが実世界で有効かを検証するために、チームは GSS‑YOLO を三つの要求の厳しいデータセットで評価しました。USOD は暗所での極小グレースケールターゲットを含み、VisDrone2019 はドローン撮影の込み入った市街シーンで小さな歩行者や車両が多数写ります。DIOR は飛行機、橋、船、運動場など多様な衛星画像を集めたコレクションです。三つすべてで、GSS‑YOLO は最近の YOLO 系や小物体特化モデルを含む一連の競合より高い精度、再現率、平均検出品質を一貫して達成しました。例えば USOD では、最高の精度を示しただけでなく、パラメータ数が約500万と最も少なく、処理速度も高く、毎秒数百フレームに達しました。視覚例では、他のシステムが苦戦する混雑・雑然とした場面でも、見逃しや誤検出を回避している様子が示されています。
日常的な応用への意義
非専門家向けの要点は、GSS‑YOLO によって小さく見にくいターゲットをドローンや衛星などの小型機器上で、大規模なデータセンターに頼らずに鋭く検出することが現実的になってきた、ということです。細部をよりよく保持し、グローバルな文脈で注意を導くことで、かすかな点を確信を持って識別できる物体へと変えます。なお、対象がほとんど隠れている場合や、動体ブレが極端に大きい場合などでは依然失敗することがありますが、本研究は交通管理、環境観測、セキュリティ、緊急対応など、広域をリアルタイムで監視し迅速に細部を把握することが重要な応用に対する実用的な前進を示しています。
引用: Wu, Z., Li, N., Tian, Z. et al. A lightweight feature fusion network for weak and small target detection in remote sensing. Sci Rep 16, 13295 (2026). https://doi.org/10.1038/s41598-026-43560-2
キーワード: リモートセンシング, 小物体検出, 軽量ニューラルネットワーク, ドローン画像, 地球観測