Clear Sky Science · he
רשת מיזוג תכונות קלת משקל לזיהוי מטרות חלשות וקטנות בחישה מרחוק
למה חשוב למצוא עצמים זעירים מהשמיים
מניטורינג של תנועה ונספנים ועד ניהול תגובות לאסונות — כיום לוויינים ומל״טים סורקים ברציפות את פני השטח של כדור הארץ. עם זאת, רבים מהפריטים שמעניינים אותנו ביותר — כלי רכב קטנים, סירות או חלקי תשתית — מופיעים בתמונות רק כמה פיקסלים, ויכולים לאבד בתוך בליל של בניינים, יערות או קו חוף. מאמר זה מציג את GSS‑YOLO, מערכת ראייה ממוחשבת חדשה וקלת משקל שתוכננה לזהות ב reliably מטרות חלשות וקטנות בתמונות חישה מרחוק, גם כשהתמונות מטושטשות, חשוכות או מלאות בפרטים רקע מסיחים.
האתגר של למצוא מחט בערימת שחת
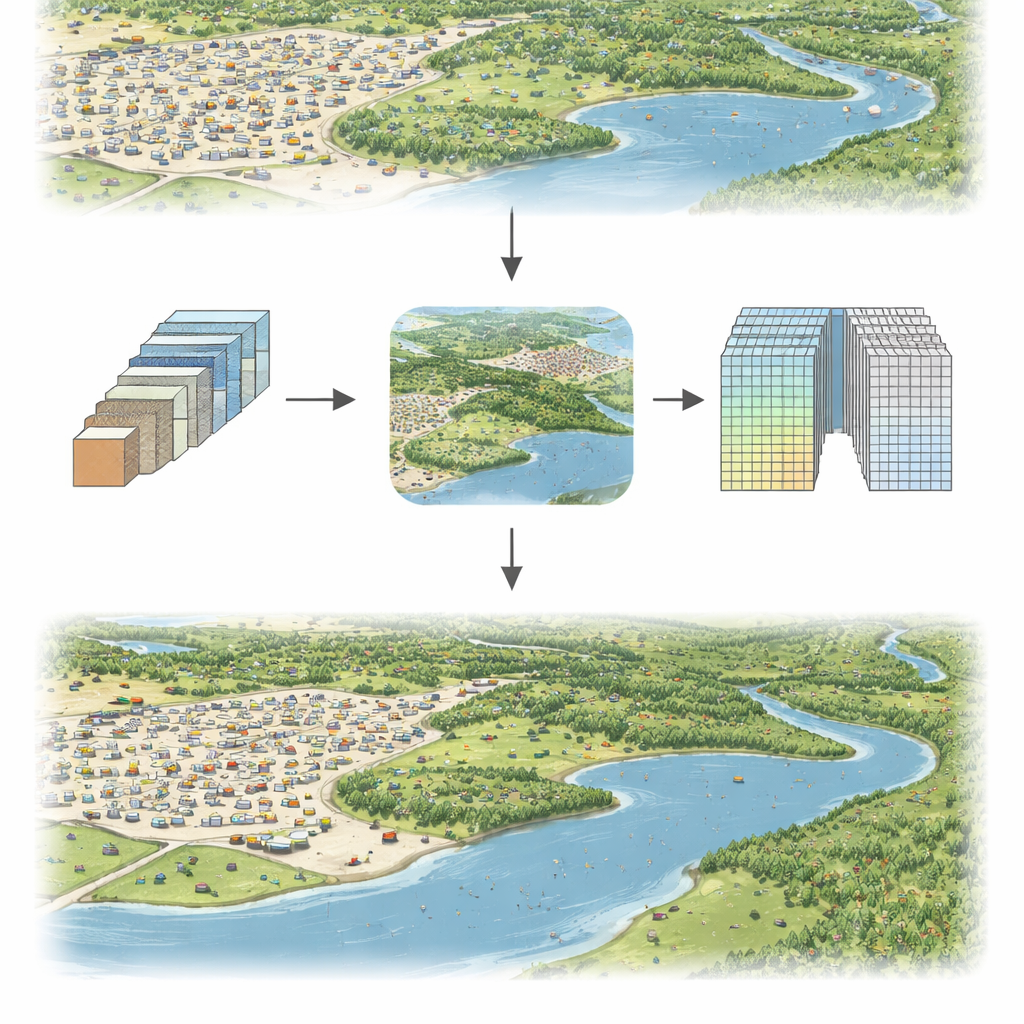
מצלמות חישה מרחוק המותקנות על מטוסים ולוויינים מצלמות אזורים עצומים בבת אחת. התצוגה הרחבה הזו שימושית, אך היא מקטינה כל עצם: מטרות קטנות עשויות לכסות רק 10×10 פיקסלים או פחות. במקביל, הרקעים מורכבים — עננים, גגות, עצים, נהרות, צללים ושינויים עונתיים בתאורה ובמזג האוויר מוסיפים רעש. מערכות זיהוי מסורתיות או מפספסות את העצמים הזעירים הללו או דורשות מודלים כבדים ואיטיים שקשה להפעיל בזמן אמת על מל״טים או התקני קצה. החוקרים שאפו לבנות מודל שהוא גם מדויק לעצמים קטנים וגם יעיל מספיק לפעולה מהירה על חומרה מוגבלת.
מערכת קומפקטית מכוילת לפרטים זעירים
החוקרים התחילו ממזהה בזמן אמת פופולרי בשם YOLOv5 והתאימו חלקים מרכזיים כדי ליצור את GSS‑YOLO. הם מציגים שלושה בלוקים עיקריים שעובדים יחד. ראשית, מודול איגוד מידע רדוד‑עמוק (SIA) מערבב מידע משכונות קטנות וקצת גדולות יותר בתמונה, ועוזר לרשת לשלב קצוות עדינים עם הקשר רחב יותר בלי להגדיל את המודל בצורה ניכרת. שנית, בלוק SPD‑Conv משנה את אופן הקטנת גודל התמונה: במקום פשוט לזרוק פיקסלים בזמן דַעַת‑רמת, הוא מארגן אותם מחדש כך שפרטים עדינים נשמרים בערוצים נוספים לפני דחיסה עדינה. שלישית, מודול המודע להקשר גלובלי (GCAM) יושב ממש לפני הגלאי הסופי ומסתכל על כל התמונה כדי להדגיש מיקומים שסביר שיחשפו מטרות קטנות ולהפחית את רעש הרקע.
כיצד המודולים החדשים עובדים יחד
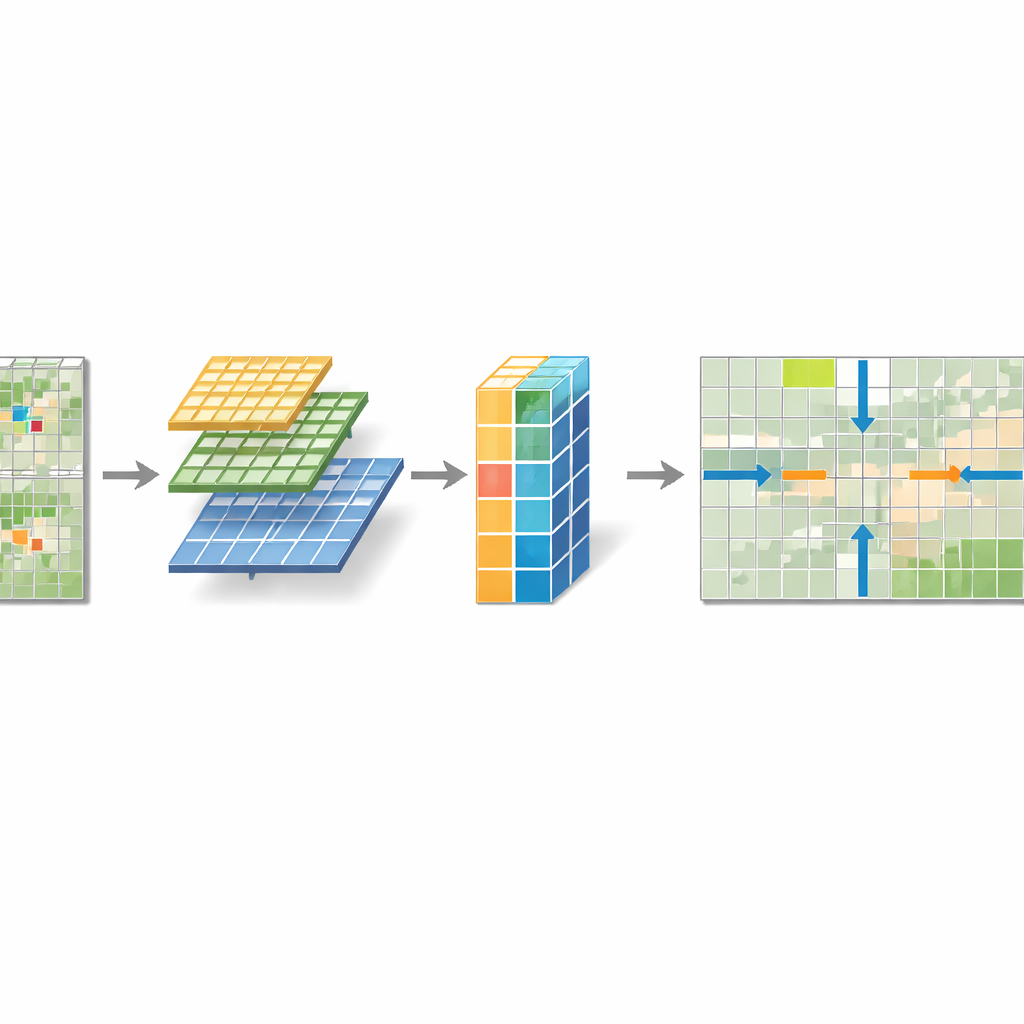
SIA מטפל בחולשה מרכזית של רבות מהרשתות הוויזואליות: קונבולוציות רגילות רואות רק כתמים מקומיים ותקועות עם הקשר גלובלי. על‑ידי הרצת מסננים מקבילים המביטים בקנה מידה מעט שונה, ואז העברת התוצאה דרך שכבות קלות שממזגות ומווסתות תכונות, SIA מייצרת תיאורים עשירים יותר של עצמים קטנים בלי להוסיף הרבה פרמטרים. SPD‑Conv מתמודד עם בעיה שונה — אובדן מידע מדגימה אגרסיבית כלפי מטה. הוא חותך את מפת התכונות לתת‑רשתות משולבות וערם אותן על גבי עומק הערוצים, כך שאף פיקסל אינו מושלך; מסנן 1×1 פשוט דוחס את הייצוג העשיר הזה. GCAM מוסיף אפקט "זרקור" גלובלי. הוא מאחד מידע בנפרד לאורך כיוונים אופקיים ואנכיים כדי לעקוב אחרי שורות ועמודות שבהן מופיעות מטרות זעירות, ומשלב זאת עם מנגנון תשומת לב מקושט ערוצי. התוצאה היא מסכה רב‑ממדית שמחזקת אותות במיקומים סבירים למטרה ומדכאת מרקמים מבלבלים בשאר המקומות.
בדיקת המודל במבחן
כדי לבדוק האם הרעיונות הללו מתרגמים לשיפורים במציאות, הצוות העריך את GSS‑YOLO על שלוש מערכות נתונים תובעניות. USOD מכיל מטרות אפורות מאוד קטנות בסצנות מדללות אור; VisDrone2019 מציע סצנות עירוניות עמוסות שצולמו ממל״טים, מלאות הולכי רגל וכלי רכב זעירים; ו‑DIOR היא אוסף לווייני מגוון הכולל מטוסים, גשרים, ספינות, מגרשי ספורט ועוד. בכל השלוש, GSS‑YOLO השיג בעקביות דיוק גבוה יותר, אחזור טוב יותר ואיכות זיהוי ממוצעת גבוהה יותר בהשוואה לחבילה של מתחרים מודרניים, כולל גרסאות YOLO עכשוויות ומספר מודלים ייעודיים לעצמים קטנים. בסט הנתונים USOD, לדוגמה, הוא לא רק סיפק את הדיוק הטוב ביותר אלא עשה זאת עם מעט הפרמטרים ביותר — כ‑5 מיליון — ומהירות העיבוד הגבוהה ביותר, עד מאות פריימים בשנייה. דוגמאות ויזואליות מראות שהוא נמנע גם מאי‑זיהוי וגם מאיתותים שגויים בסצנות צפופות ומסובכות שבהן מערכות אחרות מתקשות.
מה זה אומר ליישומים יומיומיים
ללא‑מומחים, המסר המרכזי הוא ש‑GSS‑YOLO עושה את זה אפשרי יותר להריץ זיהוי חודרני על מטרות קטנות וקשות לזיהוי ישירות על מל״טים, לוויינים או התקנים קומפקטיים אחרים, בלי להסתמך על מרכזי נתונים ענקיים. על‑ידי שמירה טובה יותר של פרטים עדינים בתמונה ושימוש בהקשר גלובלי להנחיית תשומת הלב, המודל הופך כתמים חלשים לחפצים מזוהים בבטחון. אמנם הוא עדיין עלול להיכשל בתנאים קיצוניים — למשל כשחלק גדול מהמטרה מוסתר או שיש טשטוש תנועה חמור — העבודה מהווה צעד מעשי לעבר ניטור רחב־אזורי בזמן אמת לניהול תנועה, תצפית סביבתית, ביטחון ותגובה לחירום, שם ראיית פרטים זעירים במהירות יכולה לעשות הבדל גדול.
ציטוט: Wu, Z., Li, N., Tian, Z. et al. A lightweight feature fusion network for weak and small target detection in remote sensing. Sci Rep 16, 13295 (2026). https://doi.org/10.1038/s41598-026-43560-2
מילות מפתח: חישה מרחוק, זיהוי עצמים קטנים, רשת נוירונים קלת משקל, תמונות מל״ט, תצפית על כדור הארץ