Clear Sky Science · sv
Användning av den adaptiva kvasi-linjära viskoelastiska modellen för att förutsäga last-avlastning, spänningsavslappning och sinusbelastning av grislever
Varför leverns mjukhet spelar roll
När du tvärnitar i en bilolycka eller när en kirurg drar i ett organ under en operation beter sig levern inte som ett enkelt gummiband. Den töjs långsamt, slappnar av och dissipera energi på sätt som är svåra att förutsäga. Denna studie undersöker hur väl en populär matematisk modell kan fånga det komplexa beteendet i grislever och ställer en bedrägligt enkel fråga: är modellens parametrar verkliga materialegenskaper hos levern, eller ändrar de sig beroende på hur snabbt och på vilket sätt vävnaden belastas?
Hur forskare idag modellerar mjuka organ
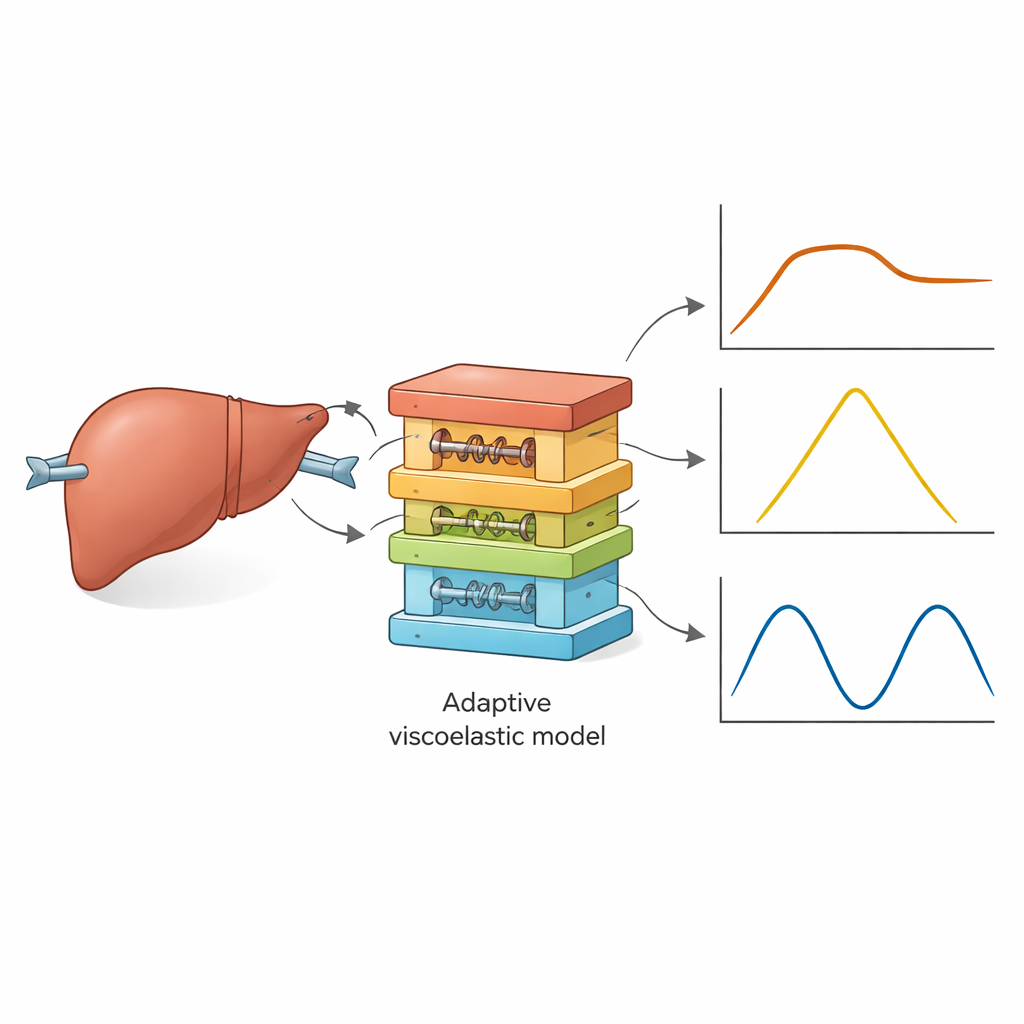
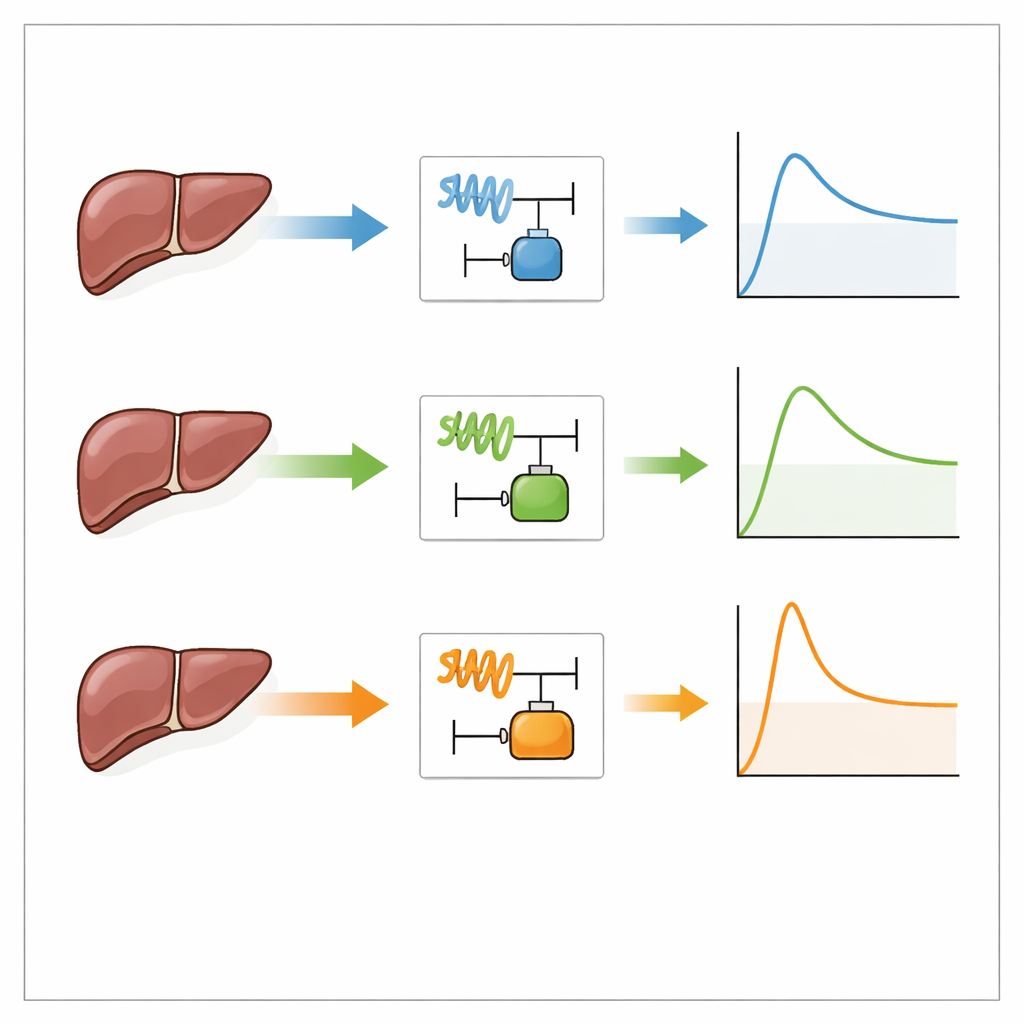
Mjuka organ såsom lever är viskoelastiska: de motstår deformation som ett elastiskt fast ämne, men de flödar och slappnar också av som en tjock vätska. I årtionden har forskare använt modellfamiljer som kallas kvasi-linjära viskoelastiska (QLV) modeller för att beskriva detta beteende. En förbättrad variant, den adaptiva kvasi-linjära viskoelastiska (AQLV) modellen, representerar vävnad som kombinationer av fjädrar och dashpots vars respons kan förändras med töjning. Den är attraktiv eftersom den har analytiska formler för vanliga belastningstyper och kan kalibreras från relativt enkla tester. Men det vanliga sättet att kalibrera AQLV-modellen använder långsam uttänjning och uppehåll i vävnaden, vilket lämnar öppet huruvida samma parametrar kan användas pålitligt när levern belastas mycket snabbare, som vid stötar eller snabba kirurgiska manövrer.
Utmana levermodellen
Författarna använde AQLV-parametrar från tidigare långsamma tester på grislever och bad modellen förutsäga tre mycket olika experiment utförda i en separat studie: en snabb uttänjning följd av ett uppehåll (spänningsavslappning), en triangulär last-avlastningscykel, och en fram-och-tillbaka sinusvågsbelastning vid flera frekvenser. I varje fall matades uppmätt töjning från experimenten in i modellen för att generera förutsagd spänning, som sedan jämfördes med de faktisk uppmätta spänningarna. Inledningsvis hade modellen stora problem: felen var stora, vissa förutsägelser visade omöjlig negativ dragspänning under avlastning, och viktiga energimått skiljde sig avsevärt från experimentet. Det innebar att den ursprungliga parametersatsen, erhållen vid en långsam töjningshastighet, inte utan vidare kunde återanvändas under andra belastningsförlopp.
Finjustera modellen för varje belastningstyp
För att gå djupare kalibrerade forskarna om AQLV-parametrarna separat för varje belastningsfall, med hjälp av minstakvadratoptimering samtidigt som modellstrukturen bibehölls. När parametrarna ställdes om reproducerade modellen snabba spänningsavslappningskurvor nästan perfekt, med fel som minskade med flera storleksordningar; den gav också realistiska förutsägelser för den snabba rampen i sig. För last-avlastningscykler tog omkalibreringen bort artefakten med negativ spänning och förde in- och utlagrad energi nära de experimentella värdena. Vid sinusbelastning tillät de justerade parametrarna modellen att matcha hur styv levern ter sig (lagringsmodul) och hur mycket energi den dissipera (förlustmodul och förlusttangent) över frekvenser, med endast mindre avvikelser vid den högsta testade frekvensen. Avgörande var att mönstren för hur individuella fjäderstyvheter och avslappningstider ändrades visade tydligt att de interna parametrarna systematiskt skiftar med töjningshastighet och frekvens.
Kan en kalibrering täcka många situationer?
Teamet utforskade sedan en praktisk genväg: kunde de kalibrera modellen en gång i ett snabbt ramp-håll-test och återanvända dessa parametrar för att förutsäga andra men relaterade belastningar? Att använda snabbramp-håll-parametrar för att förutsäga sinusvågstester vid liknande medeltöjningshastigheter fungerade någorlunda väl för den elastiska delen av responsen: lagringsmodulen låg nära de experimentella värdena över alla frekvenser. Däremot skiljde sig mått kopplade till energiförluster, särskilt förlusttangenten, fortfarande avsevärt. Att applicera samma parametersats på last-avlastningscykler gav större spänningsfel och missmatchade in- och utlagrade energier, även om kurvornas övergripande form fångades. Dessa resultat tyder på att det inte räcker att matcha töjningshastighet ensam; den exakta tidsmönstret för belastningen spelar också roll.
Vad detta betyder för modellering av verklig vävnad
Ur ett vidare perspektiv visar studien att parametrarna i AQLV-modellen inte är fasta, universella fingeravtryck för levervävnad. Istället beror de starkt på hur vävnaden testas — hur snabbt den töjs, hur länge den hålls, och om belastningen är en enstaka puls, en cykel eller en kontinuerlig oscillation. Modellen kan beskriva enaxlat leverbeteende mycket väl när den anpassas till ett specifikt protokoll, men den ger inte en enda, allmängiltig uppsättning leverkonstanter. För tillämpningar som bilkraschimuleringar, kirurgisk planering eller design av realistiska träningsfantomer innebär detta att modellörer måste välja antingen att kalibrera om för varje belastningsscenario eller att anta mer avancerade fraktionella viskoelastiska modeller som bättre täcker ett brett spann av tidsskalor med en parametersats. I vardagliga termer har levern ingen enda ”styvhet”; dess upplevda styvhet ändras beroende på hur du petar, drar eller skakar den, och våra modeller måste ta hänsyn till det.
Citering: Bittner-Frank, M., Aryeetey, O.J., Estermann, SJ. et al. Usage of the adaptive quasi-linear viscoelastic model to predict load-unload, stress-relaxation, and sine load of porcine liver. Sci Rep 16, 10675 (2026). https://doi.org/10.1038/s41598-026-45415-2
Nyckelord: viskoelastisk lever, beroende av töjningshastighet, biomekanisk modellering, mekanik för mjuk vävnad, adaptiv kvasi-linjär viskoelasticitet