Clear Sky Science · sv
Kalorimetrisk differentiell trycksensor med hög känslighet för hydrodynamisk perception
Varför undervattensrobotar behöver en bättre känsel
När människor utforskar djupare och mörkare delar av oceanen blir undervattensrobotar våra ögon och händer på platser där det är svårt för oss att ta oss. Men i grumligt vatten där kameror och sonar har begränsad funktion behöver dessa maskiner ett annat sätt att ”känna” sin omgivning. Den här artikeln presenterar en ny typ av trycksensor som ger undervattensrobotar en fiskliknande förmåga att uppfatta vattenflöde, vilket hjälper dem att styra mer exakt, uppskatta sin egen rörelse och till och med upptäcka dolda hinder bara genom små krusningar i vattnet.

Lärdomar från hur fiskar känner vattnet
Fiskar navigerar i grumliga floder och djupa hav med hjälp av ett särskilt organ kallat sidolinjen, en rad av små sensorer längs kroppen som upptäcker små förändringar i vattentryck och flöde. Inspirerade av detta naturliga system har forskare under år byggt artificiella ”sidolinjer” för robotar. Många befintliga enheter mäter det absoluta vattentrycket runt dem, men dessa mätningar överröstas lätt av den stora tryckförändring som följer av att befinna sig på större djup. Andra registrerar endast snabba, föränderliga signaler och missar långsammare, subtila ledtrådar. Det nya arbetet tacklar dessa begränsningar med en sensor som fokuserar på tryckskillnader mellan två närliggande punkter, vilket gör att den kan bortse från den övergripande djupeffekten och i stället plocka ut svaga signaturer från närliggande flöden och hinder.
Hur den nya sensorn omvandlar tryck till värmesignaler
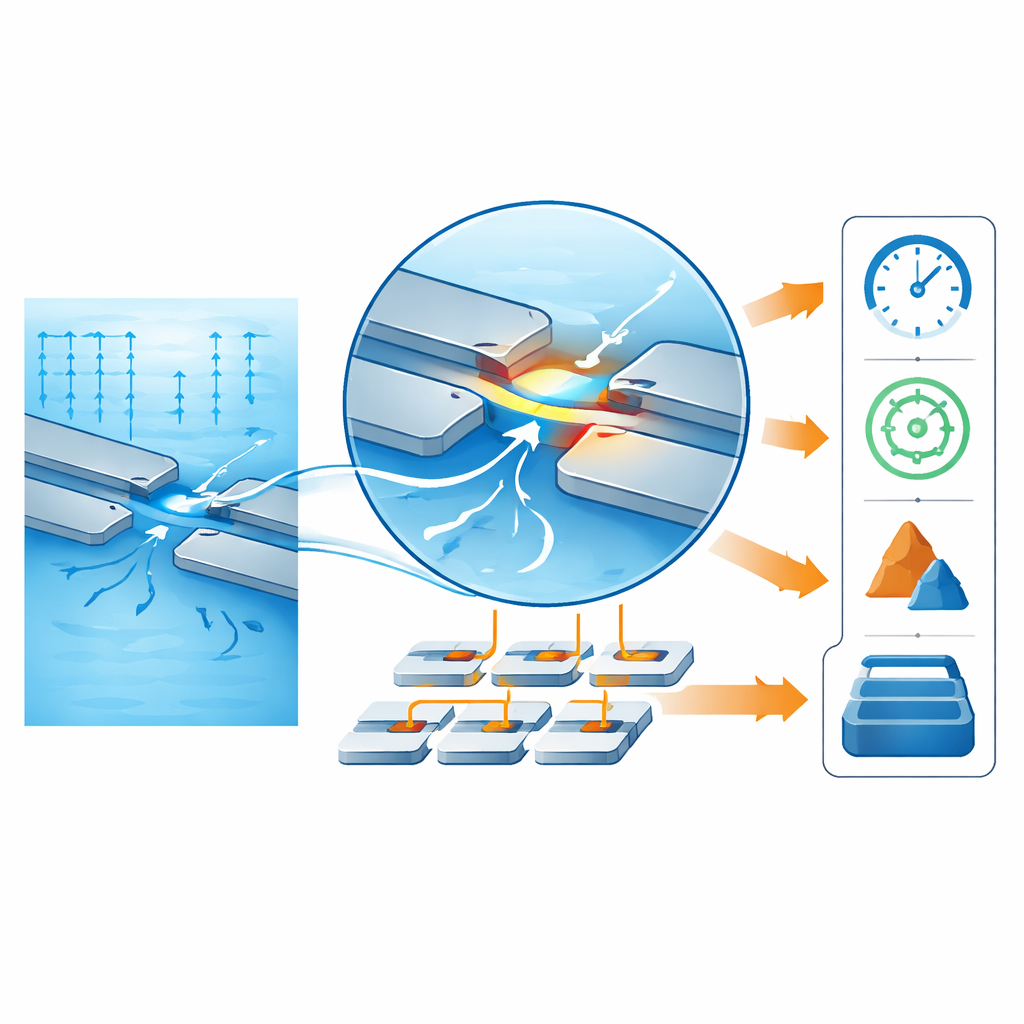
I hjärtat av enheten finns en mikroskopisk krets med två smala balkar som vetter mot varandra och separeras av ett smalt mellanrum. Vatten kan tränga igenom denna öppning från ena sidan av kretsen till den andra. När trycket på ena sidan är något högre än på den andra, drivs vatten genom springan och ökar i hastighet när det pressas mellan balkarna. En mikroskopisk värmare och temperatursensoriska metallremsor är inbyggda vid spetsen av en av balkarna. I stillastående vatten värmer värmaren omgivningen jämnt. När vatten strömmar genom springan transporterar det bort värme mer effektivt på ena sidan, vilket förändrar temperaturmönstret. Genom att jämföra en sensor nära värmaren med en kamraten längre bort kan systemet upptäcka dessa små kylningseffekter samtidigt som det slår ut långsamma förändringar i omgivande luft- eller vattentemperatur.
Att bygga en liten men robust mätanordning
Forskarna använde standardiserade mikrochipstillverkningstekniker för att karva ut balkarna och springan i kisel och belägga dem med ett tunt skyddsskikt. Noggrant kontrollerad kemisk etsning användes för att frigöra balkarna så att de kunde forma den smala flödeskanalen utan att spricka. Sensorkretsen förseglades sedan i en liten tryckkammare med portar som förbinder till omgivande vatten. Tester i en vattenfylld uppställning visade att sensorns utsignal ökar jämnt när tryckskillnaden växer, med särskilt stark respons vid mycket låga tryck. Den kan upptäcka skillnader så små som cirka 0,019 pascal — långt svagare än typiska bakgrundsvariationer — och upprepar sina mätningar pålitligt med endast liten drift över en veckas driftstid.
Att ge en robot en hydrodynamisk sjätte sinne
För att visa hur användbar denna känslighet kan vara monterade teamet tre av sensorerna i nosen på en strömlinjeformad undervattensrobotmodell. När vatten flödade förbi i en testkanal mätte varje sensor tryckskillnaden mellan två närliggande punkter på skrovet. Från dessa avläsningar lärde sig ett enkelt neuralt nätverk att härleda både hur snabbt roboten rörde sig och hur mycket den var vriden i förhållande till flödet. I många tester kunde systemet uppskatta hastigheten med en noggrannhet på några millimeter per sekund och kursen inom ungefär en grad, även vid låga hastigheter där signalerna är svagast. I en andra uppsättning experiment lyssnade samma sensorarray på de virvelmönster, kallade Kármán-vortexgator, som avges av olika föremål placerade uppströms. Genom att träna en maskininlärningsmodell på dessa flödesfingeravtryck kunde roboten skilja mellan 20 olika hinderformer och storlekar med en korrekthet på cirka 97,5 %.
Vad detta betyder för framtidens havsrobotar
Enkelt uttryckt har forskarna gett undervattensrobotar en mycket skarpare ”vattenkänsla”, liknande hur fiskar uppfattar strömmar och närliggande kroppar. Deras kalorimetriska differentiella trycksensor omvandlar minimala tryckskillnader till lättavlästa temperaturförändringar och förblir noggrann över ett användbart intervall utan att förväxla det med det övergripande djupet. Kombinerade i matriser och tolkade av mjukvara gör dessa sensorer det möjligt för robotar att spåra sin egen rörelse och känna igen hinder enbart med hjälp av flödet runt dem. Med vidare utveckling och integration i kompakt elektronik kan denna teknik hjälpa framtida havsgående robotar att navigera säkrare, verka i mörkare och mer röriga vatten och bättre dela uppgiften att utforska jordens mest dolda miljöer.
Citering: Cao, Y., Ma, Z., Kang, H. et al. Calorimetric differential pressure sensor with high sensitivity for hydrodynamic perception. Microsyst Nanoeng 12, 146 (2026). https://doi.org/10.1038/s41378-026-01270-9
Nyckelord: undervattensrobotar, trycksensorer, bioinspirerad sensning, flödesdetektion, hydrodynamisk perception