Clear Sky Science · pl
Kalorymetryczny czujnik różnicy ciśnień o dużej czułości do percepcji hydrodynamicznej
Dlaczego roboty podwodne potrzebują lepszego zmysłu dotyku
Gdy ludzie eksplorują coraz głębsze i ciemniejsze rejony oceanu, roboty podwodne stają się naszymi oczami i rękami tam, gdzie trudno nam dotrzeć. Jednak w mętnej wodzie, gdzie kamery i sonar zawodzą, maszyny te potrzebują innego sposobu „wyczuwania” otoczenia. W artykule przedstawiono nowy typ czujnika ciśnienia, który nadaje robotom podwodnym rybi zmysł wykrywania przepływu wody, pomagając im precyzyjnie sterować, szacować własny ruch, a nawet wykrywać ukryte przeszkody na podstawie drobnych fal w wodzie.

Ucząc się od tego, jak ryby czują wodę
Ryby poruszają się po mętnych rzekach i głębokich morzach dzięki specjalnemu organowi zwanemu linią boczną — ciągowi maleńkich receptorów wzdłuż ciała wykrywających niewielkie zmiany ciśnienia i przepływu wody. Inspirowani tym naturalnym systemem, badacze od lat tworzą sztuczne „linie boczne” dla robotów. Wiele istniejących urządzeń mierzy bezwzględne ciśnienie otaczającej wody, ale takie odczyty łatwo są zdominowane przez wielką zmianę ciśnienia wynikającą tylko z głębokości. Inne wyczuwają jedynie szybkie, zmienne sygnały i przeoczają wolniejsze, subtelne wskazówki. Nowe rozwiązanie pokonuje te ograniczenia dzięki czujnikowi skupiającemu się na różnicy ciśnień między dwoma bliskimi punktami, co pozwala zignorować ogólną głębokość i wyodrębnić delikatne sygnatury pobliskich przepływów i przeszkód.
Jak nowy czujnik zamienia ciśnienie w sygnały cieplne
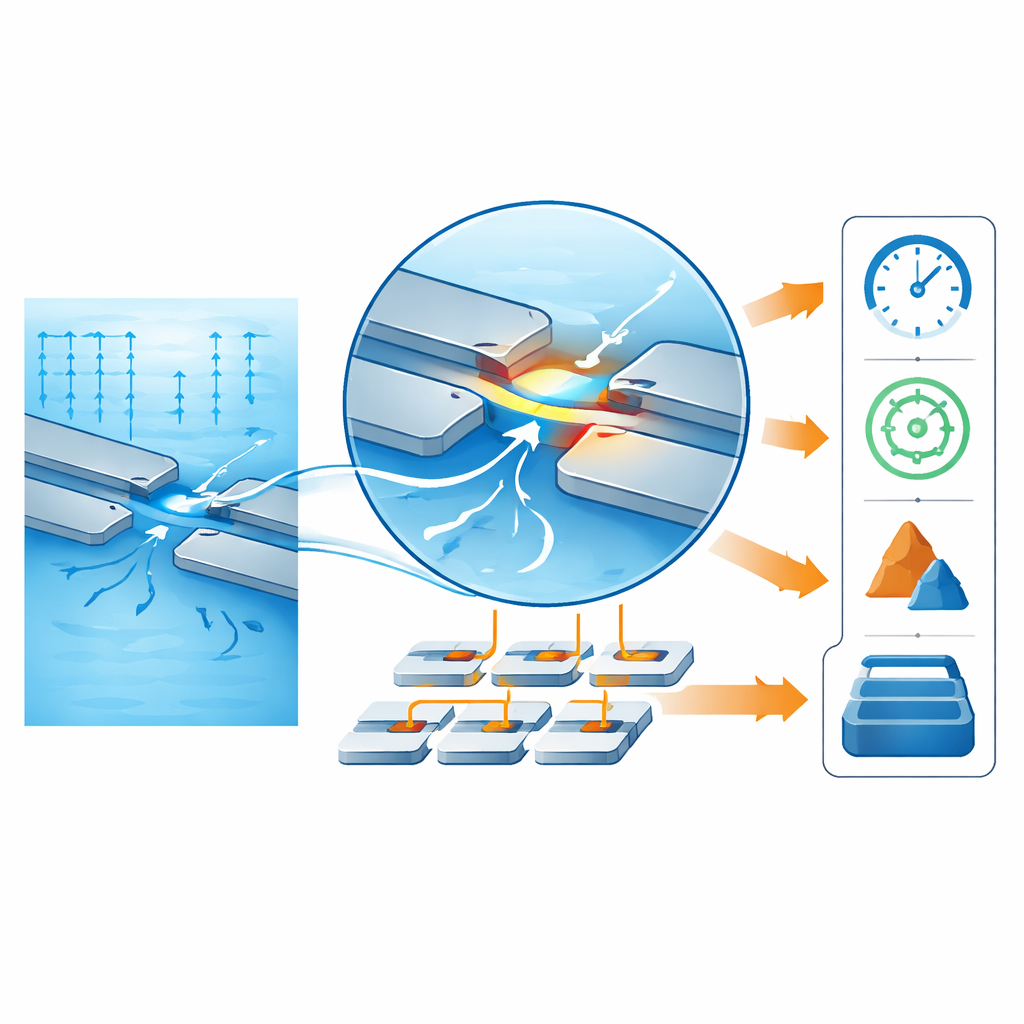
W centrum urządzenia znajduje się maleńki układ z dwoma smukłymi belkami ustawionymi naprzeciw siebie i rozdzielonymi wąską szczeliną. Woda może przepływać przez tę szczelinę z jednej strony układu na drugą. Gdy ciśnienie po jednej stronie jest nieco wyższe niż po drugiej, woda jest wypychana przez szczelinę, przyspieszając w miarę przeciskania się między belkami. Mikroskopijny grzejnik i metalowe paski czułe na temperaturę są umieszczone dokładnie na końcu jednej belki. W stojącej wodzie grzejnik równomiernie ogrzewa otoczenie. Gdy woda przepływa przez szczelinę, silniej zabiera ciepło po jednej stronie, zmieniając rozkład temperatury. Porównując czujnik blisko grzejnika z towarzyszącym czujnikiem umieszczonym dalej, system wykrywa te drobne efekty chłodzenia przy jednoczesnym eliminowaniu powolnych zmian temperatury w pomieszczeniu lub wodzie.
Budowa małego, ale wytrzymałego urządzenia pomiarowego
Badacze wykorzystali standardowe techniki wytwarzania mikroczipów, aby wyciąć belki i szczelinę z krzemu i pokryć je cienką, ochronną warstwą. Starannie kontrolowane trawienie chemiczne uwolniło belki, umożliwiając utworzenie wąskiego kanału przepływu bez pęknięć. Układ sensoryczny został następnie zapieczętowany w małej komorze ciśnieniowej z portami łączącymi ją z wodą zewnętrzną. Testy w napełnionym wodą stanowisku wykazały, że sygnał czujnika rośnie płynnie wraz ze wzrostem różnicy ciśnień, ze szczególnie silną odpowiedzią przy bardzo niskich ciśnieniach. Urządzenie potrafi wykryć różnice rzędu około 0,019 paskala — znacznie słabsze niż typowe wariacje tła — i powtarza pomiary niezawodnie, z jedynie niewielkim dryftem w ciągu tygodnia pracy.
Nadanie robotowi hydrodynamicznego szóstego zmysłu
Aby pokazać użyteczność tej czułości, zespół zamontował trzy czujniki w nosie opływowego modelu robota podwodnego. Gdy w tunelu testowym woda przepływała obok, każdy czujnik mierzył różnicę ciśnienia między dwoma pobliskimi punktami kadłuba. Na podstawie tych odczytów prostą sieć neuronowa nauczyła się wnioskować zarówno prędkość ruchu robota, jak i jego odchylenie względem przepływu. W wielu testach system potrafił oszacować prędkość z dokładnością do kilku milimetrów na sekundę i kurs z dokładnością do około jednego stopnia, nawet przy niskich prędkościach, gdzie sygnały są najsłabsze. W drugim zestawie eksperymentów ta sama matryca czujników nasłuchiwała wzorów wirów, zwanych ulicami wirowymi Kármána, generowanych przez różne obiekty umieszczone w górze prądu. Trenując model uczenia maszynowego na tych „odciskach” przepływu, robot potrafił rozróżnić 20 różnych kształtów i rozmiarów przeszkód z dokładnością około 97,5%.
Co to oznacza dla przyszłych maszyn oceanicznych
Mówiąc prościej, badacze dali robotom podwodnym znacznie ostrzejszy „zmysł wody”, podobny do tego, jak ryby wyczuwają prądy i pobliskie ciała. Ich kalorymetryczny czujnik różnicy ciśnień zamienia minimalne różnice ciśnień na łatwe do odczytania zmiany temperatury, pozostając dokładnym w użytecznym zakresie i nie dając się zmylić ogólną głębokością. Łączone w tablice i interpretowane przez oprogramowanie, czujniki te pozwalają robotom śledzić własny ruch i rozpoznawać przeszkody używając jedynie przepływu wody wokół nich. Przy dalszym rozwoju i integracji z kompaktową elektroniką technologia ta mogłaby pomóc przyszłym robotom oceanicznym bezpieczniej nawigować, działać w ciemniejszych i bardziej zatłoczonych wodach oraz lepiej wspierać eksplorację najbardziej ukrytych zakątków Ziemi.
Cytowanie: Cao, Y., Ma, Z., Kang, H. et al. Calorimetric differential pressure sensor with high sensitivity for hydrodynamic perception. Microsyst Nanoeng 12, 146 (2026). https://doi.org/10.1038/s41378-026-01270-9
Słowa kluczowe: roboty podwodne, czujniki ciśnienia, sensory inspirowane biologicznie, detekcja przepływu, percepcja hydrodynamiczna