Clear Sky Science · fr
Capteur de pression différentiel calorimétrique à haute sensibilité pour la perception hydrodynamique
Pourquoi les robots sous-marins ont besoin d’un meilleur sens du toucher
Alors que les humains explorent des zones de l’océan de plus en plus profondes et obscures, les robots sous-marins deviennent nos yeux et nos mains dans des lieux difficiles d’accès. Mais dans des eaux troubles où caméras et sonars peinent, ces machines ont besoin d’un autre moyen de « sentir » leur environnement. Cet article présente un nouveau type de capteur de pression qui dote les robots sous-marins d’un sens du flux ressemblant à celui des poissons, les aidant à se diriger avec précision, à estimer leur propre mouvement et même à détecter des obstacles cachés à partir de minuscules ondulations dans l’eau.

S’inspirer de la façon dont les poissons perçoivent l’eau
Les poissons se repérent dans des rivières troubles et en mer profonde grâce à un organe spécial appelé ligne latérale, une rangée de minuscules capteurs le long du corps qui détectent de faibles variations de pression et d’écoulement de l’eau. Inspirés par ce système naturel, des chercheurs ont consacré des années à construire des « lignes latérales » artificielles pour les robots. Beaucoup d’appareils existants mesurent la pression absolue de l’eau autour d’eux, mais ces mesures sont facilement noyées par le grand changement de pression dû à la profondeur. D’autres ne détectent que les signaux rapides et variables et manquent les indices plus lents et subtils. Le nouveau travail s’attaque à ces limites avec un capteur qui se concentre sur la différence de pression entre deux points proches, ce qui lui permet d’ignorer la profondeur globale et de repérer les empreintes ténues des flux et des obstacles à proximité.
Comment le nouveau capteur transforme la pression en signaux thermiques
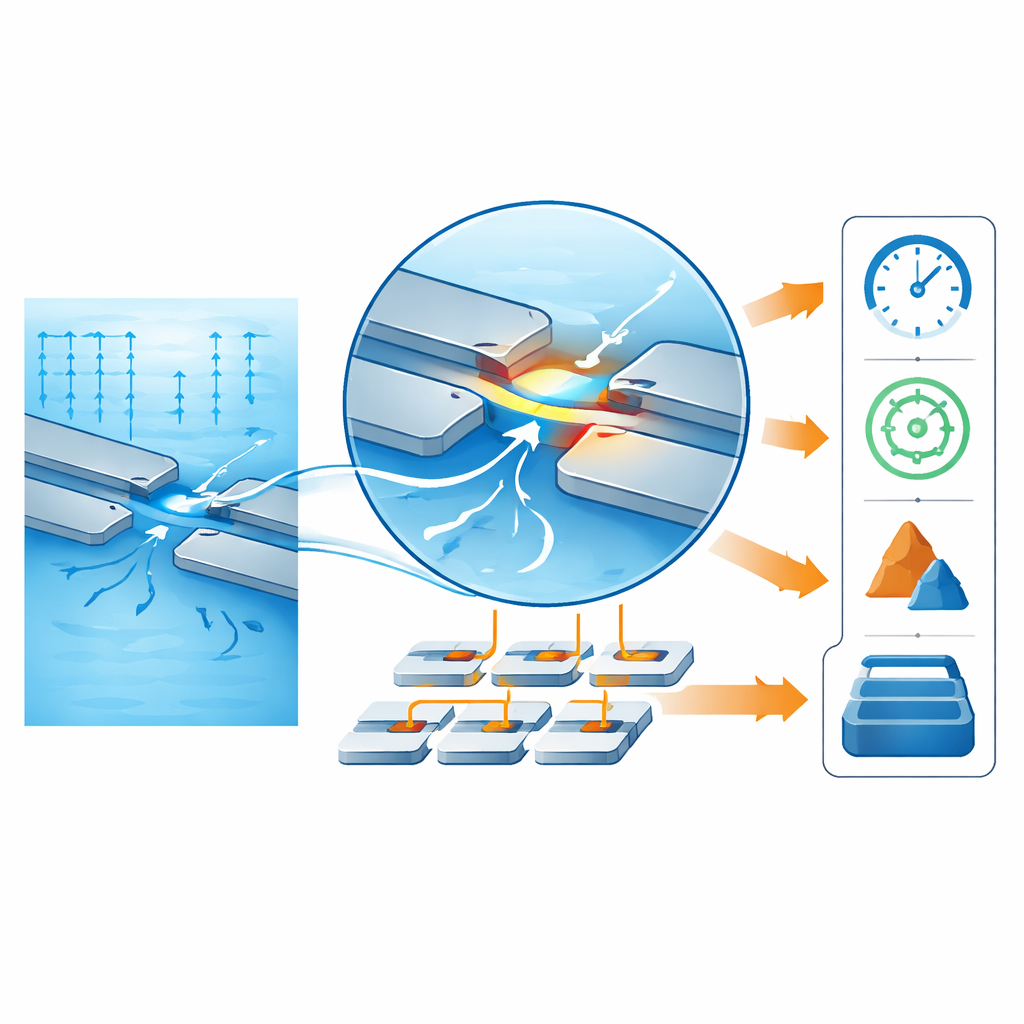
Au cœur du dispositif se trouve une puce minuscule avec deux poutres fines face à face séparées par un étroit intervalle. L’eau peut s’insinuer à travers cette fente d’un côté de la puce à l’autre. Quand la pression d’un côté est légèrement plus élevée que de l’autre, l’eau est poussée à travers la fente et s’accélère en se comprimant entre les poutres. Un microchauffeur et des bandes métalliques sensibles à la température sont intégrés à la pointe d’une des poutres. Dans une eau immobile, le chauffage réchauffe son environnement de manière homogène. Lorsque l’eau traverse la fente, elle évacue plus fortement la chaleur d’un côté, modifiant le profil de température. En comparant un capteur proche du chauffe‑point avec un capteur compagnon plus éloigné, le système peut détecter ces minuscules effets de refroidissement tout en annulant les variations lentes de température ambiante ou de l’eau.
Construire un dispositif de mesure petit mais robuste
Les chercheurs ont utilisé des techniques standard de fabrication de microprocesseurs pour tailler les poutres et la fente dans le silicium et les recouvrir d’une couche protectrice fine. Un gravage chimique finement contrôlé a été employé pour libérer les poutres afin qu’elles forment le canal d’écoulement étroit sans se fissurer. La puce de détection a ensuite été scellée dans une petite chambre de pression munie d’orifices connectant l’extérieur. Des essais dans une cuve d’eau ont montré que la sortie du capteur augmente de manière régulière avec la différence de pression, avec une réponse particulièrement forte à très faibles pressions. Il peut détecter des différences de l’ordre de 0,019 pascal — bien inférieures aux variations de fond typiques — et reproduit ses mesures de façon fiable avec une dérive minime sur une semaine de fonctionnement.
Donner à un robot un sixième sens hydrodynamique
Pour montrer l’utilité de cette sensibilité, l’équipe a monté trois de ces capteurs sur la proue d’un modèle de robot sous‑marin profilé. Lorsque l’eau s’écoulait dans un tunnel d’essai, chaque capteur mesurait la différence de pression entre deux points proches sur la coque. À partir de ces lectures, un réseau neuronal simple a appris à déduire à la fois la vitesse du robot et son angle par rapport à l’écoulement. Sur de nombreux tests, le système a pu estimer la vitesse avec une précision de l’ordre de quelques millimètres par seconde et l’orientation à environ un degré, même à faibles vitesses où les signaux sont les plus faibles. Dans une seconde série d’expériences, la même matrice de capteurs a écouté les motifs tourbillonnaires—appelés rues de vortex de Kármán—dégagés par différents objets placés en amont. En entraînant un modèle d’apprentissage automatique sur ces empreintes d’écoulement, le robot a pu distinguer 20 formes et tailles d’obstacles avec une précision d’environ 97,5 %.
Qu’est‑ce que cela signifie pour les machines océaniques du futur
En termes simples, les chercheurs ont offert aux robots sous‑marins un « sens de l’eau » beaucoup plus aigu, similaire à la façon dont les poissons perçoivent les courants et les corps à proximité. Leur capteur de pression différentiel calorimétrique convertit de microscopiques différences de pression en variations de température faciles à lire, restant précis sur une plage utile sans être perturbé par la profondeur globale. Associés en réseaux et interprétés par des logiciels, ces capteurs permettent aux robots de suivre leur mouvement et de reconnaître des obstacles en n’utilisant que l’écoulement de l’eau qui les entoure. Avec un développement ultérieur et une intégration dans de l’électronique compacte, cette technologie pourrait aider les robots océaniques du futur à naviguer plus sûrement, à opérer dans des eaux plus sombres et encombrées, et à mieux partager la tâche d’explorer les environnements les plus cachés de la Terre.
Citation: Cao, Y., Ma, Z., Kang, H. et al. Calorimetric differential pressure sensor with high sensitivity for hydrodynamic perception. Microsyst Nanoeng 12, 146 (2026). https://doi.org/10.1038/s41378-026-01270-9
Mots-clés: robots sous-marins, capteurs de pression, détection bioinspirée, détection d’écoulement, perception hydrodynamique