Clear Sky Science · de
Kalorimetrischer Differenzdrucksensor mit hoher Empfindlichkeit für hydrodynamische Wahrnehmung
Warum Unterwasserroboter einen besseren Tastsinn brauchen
Während Menschen immer tiefer und dunkler in den Ozean vordringen, werden Unterwasserroboter zu unseren Augen und Händen an Orten, an die wir selbst nur schwer gelangen. In trüben Gewässern, in denen Kameras und Sonar an ihre Grenzen stoßen, benötigen diese Maschinen jedoch eine andere Art, ihre Umgebung zu „ertasten“. Diese Arbeit stellt einen neuen Drucksensor vor, der Robotern ein fischähnliches Gespür für Wasserströmungen verleiht, sodass sie genauer steuern, ihre eigene Bewegung abschätzen und sogar versteckte Hindernisse allein aus winzigen Wasserkräuselungen erkennen können.

Lernen von der Art, wie Fische das Wasser fühlen
Fische navigieren in trüben Flüssen und tiefen Meeren mit einem speziellen Organ, der Seitenlinie, einer Reihe winziger Sensoren entlang ihres Körpers, die geringe Änderungen von Wasserdruck und -strömung wahrnehmen. Inspiriert von diesem natürlichen System haben Forschende jahrelang künstliche „Seitenlinien“ für Roboter entwickelt. Viele existierende Geräte messen den absoluten Wasserdruck um sie herum, doch diese Messwerte werden leicht von der großen Druckänderung überdeckt, die allein durch größere Tauchtiefe entsteht. Andere erfassen nur schnelle, sich ändernde Signale und übersehen langsamere, subtile Hinweise. Die neue Arbeit geht diese Beschränkungen mit einem Sensor an, der sich auf Druckdifferenzen zwischen zwei nahe beieinanderliegenden Punkten konzentriert, wodurch er die Gesamttiefe ausblenden und stattdessen die schwachen Signale nahe Strömungen und Hindernissen herausfiltern kann.
Wie der neue Sensor Druck in Wärmesignale umwandelt
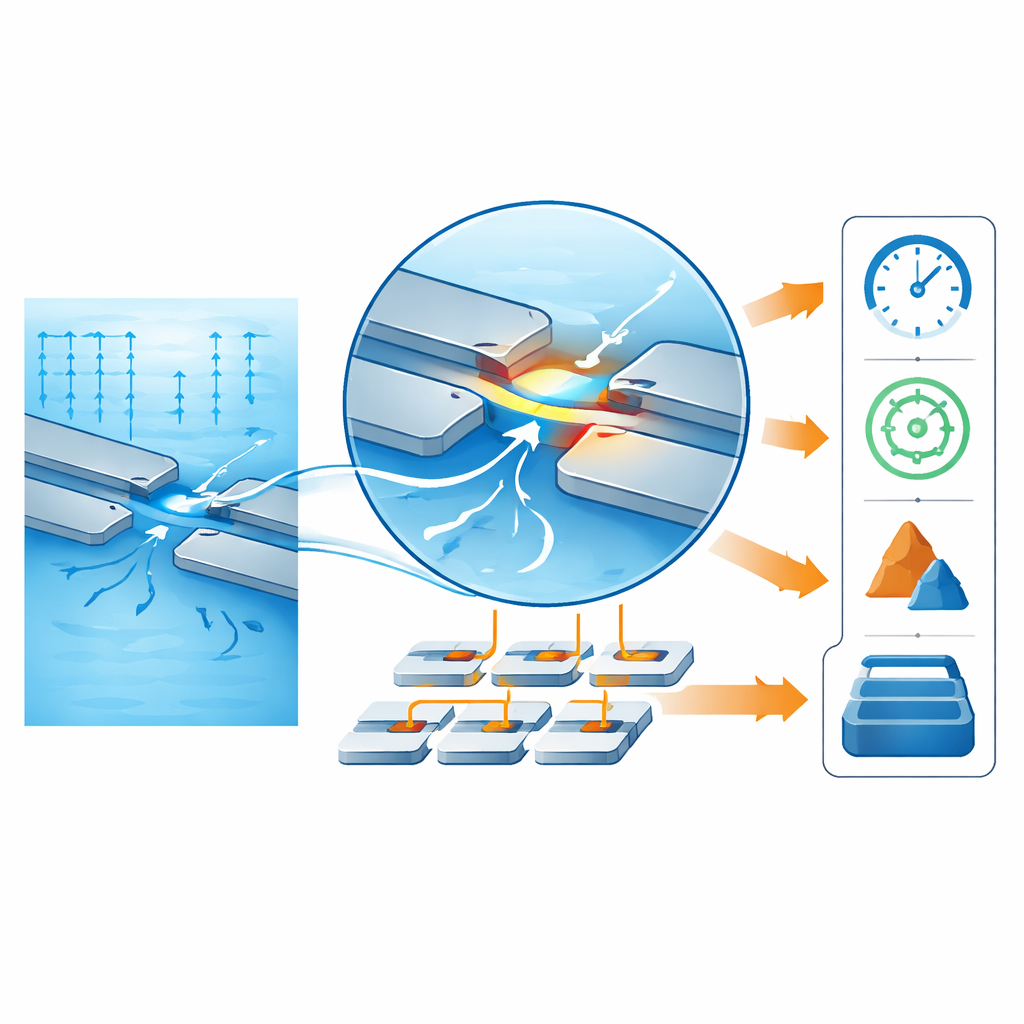
Im Kern des Geräts sitzt ein winziger Chip mit zwei schlanken, einander gegenüberstehenden Trägern, getrennt durch einen schmalen Spalt. Wasser kann durch diesen Spalt von einer Seite des Chips zur anderen fließen. Ist der Druck auf einer Seite geringfügig höher als auf der anderen, wird Wasser durch den Spalt gedrückt und beschleunigt, wenn es sich zwischen den Trägern hindurchzwängt. Ein mikroskopischer Heizer und temperatursensitive Metallstreifen sind direkt an der Spitze eines Trägers angebracht. In ruhendem Wasser erwärmt der Heizer seine Umgebung gleichmäßig. Fließt Wasser durch den Spalt, nimmt es auf einer Seite mehr Wärme mit und verändert so das Temperaturfeld. Durch den Vergleich eines nahe beim Heizer platzierten Sensors mit einem weiter entfernten Partner kann das System diese winzigen Abkühlungseffekte erkennen und gleichzeitig langsame Änderungen der Umgebungstemperatur ausblenden.
Bau eines winzigen, aber robusten Messgeräts
Die Forschenden nutzten standardisierte Mikrochipherstellungsverfahren, um die Träger und den Spalt aus Silizium herauszuarbeiten und mit einer dünnen Schutzschicht zu überziehen. Sorgfältig kontrolliertes chemisches Ätzen wurde eingesetzt, um die Träger so freizusetzen, dass sie den schmalen Strömungskanal bilden konnten, ohne zu brechen. Der Sensorchip wurde anschließend in eine kleine Druckkammer versiegelt, die Anschlüsse zur Außenwelt besitzt. Tests in einem mit Wasser gefüllten Aufbau zeigten, dass das Ausgangssignal des Sensors gleichmäßig ansteigt, wenn die Druckdifferenz zunimmt, mit besonders starker Reaktion bei sehr niedrigen Drücken. Er kann Differenzen von etwa 0,019 Pascal erkennen — deutlich schwächer als typische Hintergrundschwankungen — und liefert wiederholbare Messungen mit nur geringem Drift über eine Woche Betrieb.
Dem Roboter einen hydrodynamischen sechsten Sinn geben
Um die Nützlichkeit dieser Empfindlichkeit zu demonstrieren, montierte das Team drei der Sensoren in der Nase eines stromlinienförmigen Unterwasserrobotermodells. Während Wasser in einem Testtunnel vorbeiströmte, maß jeder Sensor die Druckdifferenz zwischen zwei nahe beieinanderliegenden Punkten am Rumpf. Aus diesen Messwerten lernte ein einfaches neuronales Netz, sowohl die Geschwindigkeit des Roboters als auch seine Drehung relativ zur Strömung abzuschätzen. In zahlreichen Tests konnte das System die Geschwindigkeit auf wenige Millimeter pro Sekunde und die Orientierung auf etwa ein Grad genau bestimmen, selbst bei niedrigen Geschwindigkeiten, bei denen die Signale am schwächsten sind. In einer zweiten Versuchsserie analysierte dasselbe Sensorarray die wirbelnden Muster — sogenannte Kármán’sche Wirbelstraßen —, die von unterschiedlichen Objekten flussaufwärts erzeugt werden. Indem ein Machine-Learning-Modell auf diese Strömungs-Fingerabdrücke trainiert wurde, konnte der Roboter 20 verschiedene Form- und Größenklassen von Hindernissen mit einer Genauigkeit von etwa 97,5 % unterscheiden.
Was das für künftige Meeresmaschinen bedeutet
Kurz gesagt haben die Forschenden Unterwasserrobotern einen deutlich schärferen „Wassersinn“ verliehen, ähnlich dem, wie Fische Strömungen und nahe Körper wahrnehmen. Ihr kalorimetrischer Differenzdrucksensor wandelt winzige Druckunterschiede in leicht ablesbare Temperaturänderungen um, bleibt über einen nützlichen Bereich hinweg genau und wird nicht durch die Gesamttiefe verwirrt. In Arrays zusammengefasst und durch Software interpretiert, ermöglichen diese Sensoren Robotern, ihre Bewegung zu verfolgen und Hindernisse allein anhand der sie umgebenden Wasserströmung zu erkennen. Mit weiterer Entwicklung und Integration in kompakte Elektronik könnte diese Technologie künftigen Ozeanrobotern helfen, sicherer zu navigieren, in dunkleren und hindernisreicheren Gewässern zu operieren und die Erforschung der verborgensten Umgebungen der Erde besser mitzutragen.
Zitation: Cao, Y., Ma, Z., Kang, H. et al. Calorimetric differential pressure sensor with high sensitivity for hydrodynamic perception. Microsyst Nanoeng 12, 146 (2026). https://doi.org/10.1038/s41378-026-01270-9
Schlüsselwörter: Unterwasserroboter, Drucksensoren, bioinspirierte Sensorik, Strömungserkennung, hydrodynamische Wahrnehmung